S-ar putea să vă placă și
- Statcom Using AtpdrawDocument6 paginiStatcom Using AtpdrawEleazar Sierra EspinozaÎncă nu există evaluări
- Condiciones KKTDocument11 paginiCondiciones KKTEleazar Sierra EspinozaÎncă nu există evaluări
- SIPROTEC 5 - The Core of Digital SubstationsDocument11 paginiSIPROTEC 5 - The Core of Digital SubstationsEleazar Sierra EspinozaÎncă nu există evaluări
- Single-Pole Operation Leads To HazardousDocument12 paginiSingle-Pole Operation Leads To HazardousEleazar Sierra EspinozaÎncă nu există evaluări
- Harware in The Loop Simulations To Test SVCDocument8 paginiHarware in The Loop Simulations To Test SVCEleazar Sierra EspinozaÎncă nu există evaluări
- SIPROTEC 5 - The Core of Digital SubstationsDocument11 paginiSIPROTEC 5 - The Core of Digital SubstationsEleazar Sierra EspinozaÎncă nu există evaluări
- Markov Chains (Part 3) : State ClassificationDocument19 paginiMarkov Chains (Part 3) : State ClassificationEleazar Sierra EspinozaÎncă nu există evaluări
- Single-Pole Operation Leads To HazardousDocument12 paginiSingle-Pole Operation Leads To HazardousEleazar Sierra EspinozaÎncă nu există evaluări
- ECE302 HW9 Solutions PDFDocument12 paginiECE302 HW9 Solutions PDFEleazar Sierra EspinozaÎncă nu există evaluări
- EE 313 Continuous-Time Systems OverviewDocument24 paginiEE 313 Continuous-Time Systems OverviewEleazar Sierra EspinozaÎncă nu există evaluări
- Influence of HV Inductive Voltage Transformers CoreDocument7 paginiInfluence of HV Inductive Voltage Transformers CoreEleazar Sierra EspinozaÎncă nu există evaluări
- Implementation of Accelerated Models EMTPDocument7 paginiImplementation of Accelerated Models EMTPEleazar Sierra EspinozaÎncă nu există evaluări
- An EMTP - RV Based Analysis of The Line SurgeDocument6 paginiAn EMTP - RV Based Analysis of The Line SurgeEleazar Sierra EspinozaÎncă nu există evaluări
- Difficulties in High Frequency Transformer ModellingDocument8 paginiDifficulties in High Frequency Transformer ModellingEleazar Sierra EspinozaÎncă nu există evaluări
- Harware in The Loop Simulations To Test SVCDocument8 paginiHarware in The Loop Simulations To Test SVCEleazar Sierra EspinozaÎncă nu există evaluări
- ATP-EMTP Evaluation of Relaying AlgorithmsDocument7 paginiATP-EMTP Evaluation of Relaying AlgorithmsEleazar Sierra EspinozaÎncă nu există evaluări
- Rational Approximation To Full-Wave ModelingDocument8 paginiRational Approximation To Full-Wave ModelingEleazar Sierra EspinozaÎncă nu există evaluări
- Low Voltage DC DistributionDocument6 paginiLow Voltage DC DistributionEleazar Sierra EspinozaÎncă nu există evaluări
- Testbed Study of Electromechanical WaveDocument6 paginiTestbed Study of Electromechanical WaveEleazar Sierra EspinozaÎncă nu există evaluări
- Background Harmonic Amplifications WithinDocument8 paginiBackground Harmonic Amplifications WithinEleazar Sierra EspinozaÎncă nu există evaluări
- Unconventional Distance ProtectionDocument7 paginiUnconventional Distance ProtectionEleazar Sierra EspinozaÎncă nu există evaluări
- Electrical Stress Monitoring of DistributionDocument8 paginiElectrical Stress Monitoring of DistributionEleazar Sierra EspinozaÎncă nu există evaluări
- Determination of Voltage Stress in Case of OperationDocument7 paginiDetermination of Voltage Stress in Case of OperationEleazar Sierra EspinozaÎncă nu există evaluări
- Damping of Oscillations Related To LumpedDocument7 paginiDamping of Oscillations Related To LumpedEleazar Sierra EspinozaÎncă nu există evaluări
- Recursive Digital Filters Design To CompensateDocument6 paginiRecursive Digital Filters Design To CompensateEleazar Sierra EspinozaÎncă nu există evaluări
- Methodology of Statistical Analysis of OscillogramsDocument7 paginiMethodology of Statistical Analysis of OscillogramsEleazar Sierra EspinozaÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Heat Transfer Types and EquationsDocument10 paginiHeat Transfer Types and EquationsRAVEENA RAVIÎncă nu există evaluări
- Harmonic excitation of 1-degree-of-freedom systemsDocument1 paginăHarmonic excitation of 1-degree-of-freedom systemsLetty VianaÎncă nu există evaluări
- (ISRM Book Series) Shunsuke Sakurai - Back Analysis in Rock Engineering-Routledge - CRC Press (2016) PDFDocument241 pagini(ISRM Book Series) Shunsuke Sakurai - Back Analysis in Rock Engineering-Routledge - CRC Press (2016) PDFJorge Cortez CampañaÎncă nu există evaluări
- Rheopecty: Confusion Between Rheopectic and Dilatant FluidsDocument2 paginiRheopecty: Confusion Between Rheopectic and Dilatant Fluidsengineer bilalÎncă nu există evaluări
- Science Quiz BeeDocument5 paginiScience Quiz BeeEr Win100% (1)
- TankDocument24 paginiTankUDayÎncă nu există evaluări
- Chapter 6 - Pinch Technologyrev2Document20 paginiChapter 6 - Pinch Technologyrev2Fadhli JapryÎncă nu există evaluări
- Astm 1784Document4 paginiAstm 1784arifin rizalÎncă nu există evaluări
- General Certificate of Education June 2008 Advanced Extension AwardDocument12 paginiGeneral Certificate of Education June 2008 Advanced Extension AwardDaniel ConwayÎncă nu există evaluări
- Induction MotorDocument27 paginiInduction MotorNandhini SaranathanÎncă nu există evaluări
- Kinetic Energy DefinitionDocument6 paginiKinetic Energy DefinitionudayshankarsÎncă nu există evaluări
- Diffusion Coefficient Full Report TiqaDocument19 paginiDiffusion Coefficient Full Report TiqaprmzÎncă nu există evaluări
- SCH 305Document34 paginiSCH 305Qwin NajyaÎncă nu există evaluări
- Effect of Degassing and Heat Treatment OnDocument9 paginiEffect of Degassing and Heat Treatment OnSinan YıldızÎncă nu există evaluări
- Storage and Flow of Powder: Mass Flow Funnel FlowDocument9 paginiStorage and Flow of Powder: Mass Flow Funnel FlowDuc HuynhÎncă nu există evaluări
- 2 Stage GearboxDocument47 pagini2 Stage GearboxSanad Shajahan0% (1)
- RFID OverviewDocument7 paginiRFID Overviewfelis132Încă nu există evaluări
- Off Grid PV SystemDocument55 paginiOff Grid PV SystemlegasuÎncă nu există evaluări
- Smart MaterialsDocument48 paginiSmart Materialsmjrobust05Încă nu există evaluări
- Introduction to PCA and FA: Dimension Reduction ToolsDocument29 paginiIntroduction to PCA and FA: Dimension Reduction ToolsPushpaRasnayakeÎncă nu există evaluări
- Suntech STP225-20 WD 225Wp ENDocument2 paginiSuntech STP225-20 WD 225Wp ENmax2503Încă nu există evaluări
- Cooling PDFDocument656 paginiCooling PDFTrầnNgọcCườngÎncă nu există evaluări
- Photo ResistorDocument3 paginiPhoto ResistorHarish PrakashÎncă nu există evaluări
- Methods and Algorithms For Advanced Process ControlDocument8 paginiMethods and Algorithms For Advanced Process ControlJohn CoucÎncă nu există evaluări
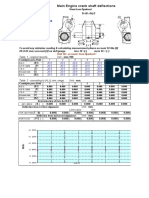
- Crankweb Deflections 9 Cyl ELANDocument2 paginiCrankweb Deflections 9 Cyl ELANСлавик МосинÎncă nu există evaluări
- NSEP 2022-23 - (Questions and Answer)Document19 paginiNSEP 2022-23 - (Questions and Answer)Aditya KumarÎncă nu există evaluări
- En010 104 Engineering MechanicsDocument1 paginăEn010 104 Engineering MechanicsArun SaiÎncă nu există evaluări
- PROBABILITY ANALYSISDocument119 paginiPROBABILITY ANALYSISAnonymous bZtJlFvPtpÎncă nu există evaluări
- Qa TableDocument9 paginiQa Tableapi-299403846Încă nu există evaluări
- Datasheet G3516 1200 RPMDocument4 paginiDatasheet G3516 1200 RPMVerita SanjuánÎncă nu există evaluări