S-ar putea să vă placă și
- Inductance Measurements For Synchronous MachinesDocument2 paginiInductance Measurements For Synchronous MachinesYusuf YaşaÎncă nu există evaluări
- Pulses in Cables: ReferencesDocument5 paginiPulses in Cables: ReferencesPaul DumitruÎncă nu există evaluări
- Capacitive Reactance Experiment - LAB 7Document6 paginiCapacitive Reactance Experiment - LAB 7Mr_asad_20Încă nu există evaluări
- A Novel Method To Test The Strength of Electrical Equipment Through Impulse Generator and Design of Its Circuit ComponentsDocument5 paginiA Novel Method To Test The Strength of Electrical Equipment Through Impulse Generator and Design of Its Circuit ComponentsIjesat JournalÎncă nu există evaluări
- ELG3106 Lab 3 EditedDocument9 paginiELG3106 Lab 3 EditedJamesÎncă nu există evaluări
- FlyBack Transformer CalculationsDocument7 paginiFlyBack Transformer CalculationsdllabarreÎncă nu există evaluări
- Introduction To Electromagnetic CompatibilityDocument6 paginiIntroduction To Electromagnetic CompatibilityIoan ŢileaÎncă nu există evaluări
- Rogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysDocument6 paginiRogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysJose Alberto RodriguezÎncă nu există evaluări
- Current Transformer Errors and Transformer InrushDocument24 paginiCurrent Transformer Errors and Transformer InrushFernandoMartínIranzoÎncă nu există evaluări
- Pesgm2006 000102Document6 paginiPesgm2006 000102sunitharajababuÎncă nu există evaluări
- E5 Post-LabDocument4 paginiE5 Post-LabBea DucaoÎncă nu există evaluări
- Ger 3961 PDFDocument16 paginiGer 3961 PDFBalan PalaniappanÎncă nu există evaluări
- I-V Characteristics of Single Electron Transistor Using MATLABDocument5 paginiI-V Characteristics of Single Electron Transistor Using MATLABseventhsensegroup100% (1)
- UNIT-3 Oscilloscopes: Cathode Ray Tube (CRT)Document16 paginiUNIT-3 Oscilloscopes: Cathode Ray Tube (CRT)sonucharyÎncă nu există evaluări
- Chapter 10 Microwave DevicesDocument18 paginiChapter 10 Microwave DevicesAghna Tiyas MandalÎncă nu există evaluări
- Currents Through Inductances, Capacitances and ResistancesDocument14 paginiCurrents Through Inductances, Capacitances and ResistancesZulu LoveÎncă nu există evaluări
- Voltage Controlled Ring OscillatorDocument4 paginiVoltage Controlled Ring OscillatorNurulMaisaraAwangÎncă nu există evaluări
- Relays and C BDocument33 paginiRelays and C BRachit KhannaÎncă nu există evaluări
- A Simple Square Rooting Circuit Based On Operational Amplifiers (Opamps)Document3 paginiA Simple Square Rooting Circuit Based On Operational Amplifiers (Opamps)Harendra Kumar100% (1)
- Efficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyDocument4 paginiEfficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyMihai PopaÎncă nu există evaluări
- Lab 7Document8 paginiLab 7Magdalena SimicÎncă nu există evaluări
- 00225647Document5 pagini00225647thavaselvanÎncă nu există evaluări
- Surge Propagation in Electrical SystemsDocument5 paginiSurge Propagation in Electrical SystemssamiÎncă nu există evaluări
- A New Approach Transformer Ground Differential: FOR ProtectionDocument15 paginiA New Approach Transformer Ground Differential: FOR ProtectionproteccionesÎncă nu există evaluări
- Fine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkDocument8 paginiFine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkHedra GirgisÎncă nu există evaluări
- Active Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersDocument10 paginiActive Current Transformer Circuits For Low Distortion Sensing in Switched Mode Power ConvertersDaniel De' SouzaÎncă nu există evaluări
- Critical Bandwidth For The Load Transient Response of VRMDocument8 paginiCritical Bandwidth For The Load Transient Response of VRMharis13harisÎncă nu există evaluări
- LVDT and Capacitance Strain GuagesDocument13 paginiLVDT and Capacitance Strain GuagesJignesh P Korat100% (1)
- Bee Lab ManualDocument60 paginiBee Lab Manualravi828Încă nu există evaluări
- Capacitive Reactance Experiment Lab 7Document7 paginiCapacitive Reactance Experiment Lab 7قويه TasmanÎncă nu există evaluări
- Electrical - Ijeeer - Wavelet Modulated Z-SourceDocument10 paginiElectrical - Ijeeer - Wavelet Modulated Z-SourceTJPRC PublicationsÎncă nu există evaluări
- Li Bai ModelPulseTransfDocument5 paginiLi Bai ModelPulseTransffisico1977Încă nu există evaluări
- Power Electronics Exam 2017 SolutionsDocument13 paginiPower Electronics Exam 2017 SolutionsBakri BugaÎncă nu există evaluări
- A Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaiDocument7 paginiA Beam-Forming Transmit ASIC For Driving Ultrasonic Arrays: John V. Hat®eld, Kwet Seng ChaitoloiceÎncă nu există evaluări
- EEE 124 Exp5Document4 paginiEEE 124 Exp5Rakibul Hassan SajonÎncă nu există evaluări
- Study of Impulse Voltage Distribution in Transformer WindingsDocument5 paginiStudy of Impulse Voltage Distribution in Transformer WindingsBhuvanes Waran100% (1)
- An LVDT-based Self-Actuating Displacement TransducerDocument7 paginiAn LVDT-based Self-Actuating Displacement TransducerGeorge PetersÎncă nu există evaluări
- A Simple Current-Mode Quadrature Oscillator Using Single CDTADocument8 paginiA Simple Current-Mode Quadrature Oscillator Using Single CDTAa_damrongÎncă nu există evaluări
- Control and Performance of A Medium-Voltage Cascade H-Bridge STATCOMDocument5 paginiControl and Performance of A Medium-Voltage Cascade H-Bridge STATCOMvinay kumarÎncă nu există evaluări
- ELEC3105 Lab4Document10 paginiELEC3105 Lab4James AllenÎncă nu există evaluări
- Bee Lab ManualDocument62 paginiBee Lab ManualSwetha VanamÎncă nu există evaluări
- SSCB 1Document5 paginiSSCB 1KARTHIK NÎncă nu există evaluări
- Coaxial Cable Resistance MeasurementDocument3 paginiCoaxial Cable Resistance Measurementassadullaashraf627Încă nu există evaluări
- High-Swing, High-Impedance MOS Cascode Circuit: I. (OBC) ForDocument10 paginiHigh-Swing, High-Impedance MOS Cascode Circuit: I. (OBC) ForBodhayan PrasadÎncă nu există evaluări
- Energy MeterDocument12 paginiEnergy MeterKarthik BalaguruÎncă nu există evaluări
- Zhi-Jun LUO, Xiao-Dan REN, Hao Yang, Gang-Lin CAI, Chu Qing, Yan-Ling LUODocument4 paginiZhi-Jun LUO, Xiao-Dan REN, Hao Yang, Gang-Lin CAI, Chu Qing, Yan-Ling LUOhamza shahzadÎncă nu există evaluări
- Switched-Capaci T 6 - D C Converter Inrush Current and LowDocument7 paginiSwitched-Capaci T 6 - D C Converter Inrush Current and LowHamid BoualiÎncă nu există evaluări
- Textile Antennas, A Practical Approach: H.J. Visser, A.C.F. ReniersDocument8 paginiTextile Antennas, A Practical Approach: H.J. Visser, A.C.F. ReniersOsman Demir100% (1)
- An Autonomous Institute Under The Aegis of Ministry of Education, Govt. of IndiaDocument52 paginiAn Autonomous Institute Under The Aegis of Ministry of Education, Govt. of IndiaRahul MeenaÎncă nu există evaluări
- Eel1166 CK1Document11 paginiEel1166 CK1Shafiq HafizullahÎncă nu există evaluări
- Inrush Calculation With ATP PDFDocument5 paginiInrush Calculation With ATP PDFCarlos Lino Rojas AgüeroÎncă nu există evaluări
- 12 12 2013 11 58 43 PDFDocument8 pagini12 12 2013 11 58 43 PDFDante FilhoÎncă nu există evaluări
- Astable Multivibrator: Non Linear Applications:-A) Astable Multivibrator B) Mono Stable MultivibratorDocument15 paginiAstable Multivibrator: Non Linear Applications:-A) Astable Multivibrator B) Mono Stable MultivibratorFarhan AkhterÎncă nu există evaluări
- A Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataDocument6 paginiA Wavelet-Based Algorithm For Disturbances Detection Using Oscillographic DataVijay KrishnaÎncă nu există evaluări
- Modelling and Analysis of Transformer Winding at High FrequenciesDocument7 paginiModelling and Analysis of Transformer Winding at High FrequenciesFlores JesusÎncă nu există evaluări
- Design of Power Supply For On-Line Monitoring System of Transmission LinesDocument5 paginiDesign of Power Supply For On-Line Monitoring System of Transmission Linesdio39saiÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Á-©'xç-Úõ - V°æ°æç-Î Ç®Óí U - C - ÇDocument1 paginăÁ-©'xç-Úõ - V°æ°æç-Î Ç®Óí U - C - ÇAnjireddy ThatiparthyÎncă nu există evaluări
- Xian 09 Capacitively Based Mems Affinity Glucose SensorDocument4 paginiXian 09 Capacitively Based Mems Affinity Glucose SensorAnjireddy ThatiparthyÎncă nu există evaluări
- Design and Analysis of Capacitive MEMS Viscometric Sensor For CGMDocument4 paginiDesign and Analysis of Capacitive MEMS Viscometric Sensor For CGMAnjireddy ThatiparthyÎncă nu există evaluări
- Full Operational Range Dynamic Modeling of Microcantilever BeamsDocument9 paginiFull Operational Range Dynamic Modeling of Microcantilever BeamsAnjireddy ThatiparthyÎncă nu există evaluări
- 04912374Document10 pagini04912374Anjireddy ThatiparthyÎncă nu există evaluări
- Deflection Sensitivity Calibration of Heated Microcantilevers Using Pseudo-GratingsDocument2 paginiDeflection Sensitivity Calibration of Heated Microcantilevers Using Pseudo-GratingsAnjireddy ThatiparthyÎncă nu există evaluări
- Determination of The Anisotropy of Young's Modulus Using A Coupled Microcantilever ArrayDocument9 paginiDetermination of The Anisotropy of Young's Modulus Using A Coupled Microcantilever ArrayAnjireddy ThatiparthyÎncă nu există evaluări
- Error Analysis For Visual Odometry On Indoor, Wheeled Mobile Robots With 3-D SensorsDocument11 paginiError Analysis For Visual Odometry On Indoor, Wheeled Mobile Robots With 3-D SensorsAnjireddy ThatiparthyÎncă nu există evaluări
- Multi-DOF Counterbalance Mechanism For A Service Robot Arm: Hwi-Su Kim and Jae-Bok Song, Member, IEEEDocument8 paginiMulti-DOF Counterbalance Mechanism For A Service Robot Arm: Hwi-Su Kim and Jae-Bok Song, Member, IEEEAnjireddy ThatiparthyÎncă nu există evaluări
- Micro-/Nanocombined Gas Sensors With Functionalized Mesoporous Thin Film Self-Assembled in Batches Onto Resonant CantileversDocument7 paginiMicro-/Nanocombined Gas Sensors With Functionalized Mesoporous Thin Film Self-Assembled in Batches Onto Resonant CantileversAnjireddy ThatiparthyÎncă nu există evaluări
- Experimental Investigation of Robust Motion Tracking Control For A 2-DOF Flexure-Based MechanismDocument9 paginiExperimental Investigation of Robust Motion Tracking Control For A 2-DOF Flexure-Based MechanismAnjireddy ThatiparthyÎncă nu există evaluări
- Adaptive Shared Control For A Novel Mobile Assistive RobotDocument12 paginiAdaptive Shared Control For A Novel Mobile Assistive RobotAnjireddy ThatiparthyÎncă nu există evaluări
- Design and Implementation of A Lightweight Bioinspired Pectoral Fin Driven by SMADocument13 paginiDesign and Implementation of A Lightweight Bioinspired Pectoral Fin Driven by SMAAnjireddy ThatiparthyÎncă nu există evaluări
- Array of Robots Augmenting The Kinematics of Endocavitary SurgeryDocument9 paginiArray of Robots Augmenting The Kinematics of Endocavitary SurgeryAnjireddy ThatiparthyÎncă nu există evaluări
- Consumer Surplus:: at K Chabveka Economics NotesDocument28 paginiConsumer Surplus:: at K Chabveka Economics NotesShawn DzingayiÎncă nu există evaluări
- Sap Query Procedure (Sqvi)Document8 paginiSap Query Procedure (Sqvi)nona_rose218Încă nu există evaluări
- 2009-09-06 181738 Linsw RegDocument67 pagini2009-09-06 181738 Linsw Regam1liÎncă nu există evaluări
- Nuxeo BookDocument335 paginiNuxeo Bookdannao4Încă nu există evaluări
- Methods of Test For Rheometer - ODR: 1. ScopeDocument1 paginăMethods of Test For Rheometer - ODR: 1. ScopeArun GuptaÎncă nu există evaluări
- EIE3123 Dynamic Electronic Systems - p1-p57Document57 paginiEIE3123 Dynamic Electronic Systems - p1-p57Safwat KhairÎncă nu există evaluări
- 39 - Profil Uang Elektronik - Spesifikasi TeknisDocument9 pagini39 - Profil Uang Elektronik - Spesifikasi TeknisM DedeÎncă nu există evaluări
- Market Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduDocument54 paginiMarket Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduTI Logic ?? sobayedÎncă nu există evaluări
- NASA Facts Explorer XVI The Micrometeoroid SatelliteDocument4 paginiNASA Facts Explorer XVI The Micrometeoroid SatelliteBob AndrepontÎncă nu există evaluări
- Pump Station System Curves Session 1Document29 paginiPump Station System Curves Session 1Toan LeÎncă nu există evaluări
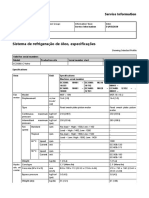
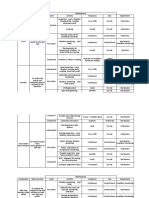
- Sistema de Refrigeração de Óleo, EspecificaçõesDocument2 paginiSistema de Refrigeração de Óleo, EspecificaçõesAlexandreÎncă nu există evaluări
- CSTR in SeriesDocument3 paginiCSTR in SeriesDhananjay KadamÎncă nu există evaluări
- False: True True True TrueDocument2 paginiFalse: True True True TrueSuubi brianÎncă nu există evaluări
- From-To Chart ExampleDocument22 paginiFrom-To Chart Exampleajeng.saraswatiÎncă nu există evaluări
- 1 Kinetic Molecular TheoryDocument23 pagini1 Kinetic Molecular TheoryAeron Kurt AcuñaÎncă nu există evaluări
- 3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Document16 pagini3.032 Problem Set 2 Solutions: Due: Start of Lecture, 09.21.07Pkay TandohÎncă nu există evaluări
- Virtual Memory & Demand PagingDocument22 paginiVirtual Memory & Demand PagingAli AhmadÎncă nu există evaluări
- Assignments CHSSCDocument7 paginiAssignments CHSSCphani12_chem5672Încă nu există evaluări
- ECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsDocument41 paginiECON4150 - Introductory Econometrics Lecture 2: Review of StatisticsSaul DuranÎncă nu există evaluări
- Copeland Discus Digital Compressors Coresense Technology en 2884258Document2 paginiCopeland Discus Digital Compressors Coresense Technology en 2884258Roberto CastilloÎncă nu există evaluări
- Probability H Venn Diagrams v2 SOLUTIONS v2 2 PDFDocument7 paginiProbability H Venn Diagrams v2 SOLUTIONS v2 2 PDFEcho BaguinonÎncă nu există evaluări
- How To Find Equilibrium Price and Quantity MathematicallyDocument2 paginiHow To Find Equilibrium Price and Quantity MathematicallyJoshua S Mjinja100% (1)
- Syllabus 3210 Fall 2012 PDFDocument4 paginiSyllabus 3210 Fall 2012 PDFRahul KarnaÎncă nu există evaluări
- Chapter 2 Approaches To Software DesignDocument25 paginiChapter 2 Approaches To Software DesigntarunkakkarÎncă nu există evaluări
- Identification - of - Vulkan Vulastik-L CouplingsDocument2 paginiIdentification - of - Vulkan Vulastik-L CouplingsBill NevisÎncă nu există evaluări
- Maintenance Component Main Function Level Activity Frequency Line DepartmentDocument7 paginiMaintenance Component Main Function Level Activity Frequency Line DepartmentBarathÎncă nu există evaluări
- Cell Biology: Science Explorer - Cells and HeredityDocument242 paginiCell Biology: Science Explorer - Cells and HeredityZeinab ElkholyÎncă nu există evaluări
- Assignment 1 - Spring2006: SolutionDocument31 paginiAssignment 1 - Spring2006: SolutionMuhammad UmairÎncă nu există evaluări
- Alp - Sizer InfoDocument13 paginiAlp - Sizer InfoLê Quang DuyÎncă nu există evaluări
- Bituminus Material PDFDocument196 paginiBituminus Material PDFSubramanian BalakrishnanÎncă nu există evaluări