S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Homework 3 Solutions: Joe Neeman September 22, 2010Document5 paginiHomework 3 Solutions: Joe Neeman September 22, 2010ShuX13Încă nu există evaluări
- Homework 2 Solutions: Joe Neeman September 22, 2010Document8 paginiHomework 2 Solutions: Joe Neeman September 22, 2010ShuX13Încă nu există evaluări
- Stat153 Assignment 3 (Due October 1, 2010)Document1 paginăStat153 Assignment 3 (Due October 1, 2010)ShuX13Încă nu există evaluări
- Stat153 Assignment 2 (Due September 24, 2010) : T T 5 2 T 1 3 2 T 2 TDocument1 paginăStat153 Assignment 2 (Due September 24, 2010) : T T 5 2 T 1 3 2 T 2 TShuX13Încă nu există evaluări
- Shumway and StofferDocument5 paginiShumway and StofferReem SakÎncă nu există evaluări
- Chapter 2 Answers for Problems Involving Lagrangian MechanicsDocument3 paginiChapter 2 Answers for Problems Involving Lagrangian MechanicsShuX13Încă nu există evaluări
- Stat153 Assignment 4 (Due October 29, 2010)Document1 paginăStat153 Assignment 4 (Due October 29, 2010)ShuX13Încă nu există evaluări
- Stat153 Assignment 1 (Due September 10, 2010) : T T T T T TDocument1 paginăStat153 Assignment 1 (Due September 10, 2010) : T T T T T TShuX13Încă nu există evaluări
- DynamicsDocument123 paginiDynamicspunjabian43100% (2)
- Permutations and Row SwapsDocument4 paginiPermutations and Row SwapsShuX13Încă nu există evaluări
- FFTandMatLab Wanjun HuangDocument26 paginiFFTandMatLab Wanjun HuangDiego PurizagaÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The UniverseDocument2 paginiThe Universeapi-328735767Încă nu există evaluări
- BiomagnetismDocument30 paginiBiomagnetismapi-19937584100% (4)
- Homework 14 Solutions Spring 2001Document2 paginiHomework 14 Solutions Spring 2001Ikhwan Wf Miscellaneous AveroesÎncă nu există evaluări
- Bab 1 Ee201Document29 paginiBab 1 Ee201Noor Hanisah AbdullahÎncă nu există evaluări
- Physics II Problems PDFDocument1 paginăPhysics II Problems PDFBOSS BOSSÎncă nu există evaluări
- Structure and Bonding IPADDocument4 paginiStructure and Bonding IPADLarissa RubarajÎncă nu există evaluări
- Precalculus Unit 6 Vectors NotesDocument30 paginiPrecalculus Unit 6 Vectors Notesapi-287816312100% (1)
- Math 53 Samplex FinalsDocument16 paginiMath 53 Samplex Finalskate_acamaÎncă nu există evaluări
- Jawaharlal Nehru Technological University Hyderabad M.Tech II Semester Examinations Structural Dynamics QuestionsDocument3 paginiJawaharlal Nehru Technological University Hyderabad M.Tech II Semester Examinations Structural Dynamics QuestionsFrank JohnÎncă nu există evaluări
- SsssDocument17 paginiSsssPhysicsÎncă nu există evaluări
- CalibrationDocument25 paginiCalibrationEka SulistyaningsihÎncă nu există evaluări
- Report #2 EASDocument5 paginiReport #2 EASVanessa NguyenÎncă nu există evaluări
- 022 TT Short-Circuit PDFDocument4 pagini022 TT Short-Circuit PDFwwe_himanshuÎncă nu există evaluări
- The Old Hats Problem: Heba Hathout, Westridge School For Girls Pasadena, CADocument11 paginiThe Old Hats Problem: Heba Hathout, Westridge School For Girls Pasadena, CAsudhir_kumar_33Încă nu există evaluări
- Couette Flow of Micropolar Fluids: Theory GoverningDocument6 paginiCouette Flow of Micropolar Fluids: Theory GoverningSrinivas JangiliÎncă nu există evaluări
- Gauge Mechanics-SardanashvilyDocument358 paginiGauge Mechanics-SardanashvilyJazon Bryan100% (1)
- To Estimate The Charge Induced On Each of The Two Identical Stryo Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb'S LawDocument8 paginiTo Estimate The Charge Induced On Each of The Two Identical Stryo Foam (Or Pith) Balls Suspended in A Vertical Plane by Making Use of Coulomb'S LawAryan BudhathokiÎncă nu există evaluări
- Nuclear Physics - Sample MaterialDocument13 paginiNuclear Physics - Sample MaterialUma SinghÎncă nu există evaluări
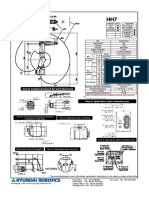
- Hh7 CatalogDocument1 paginăHh7 Catalogjitender kumarÎncă nu există evaluări
- Searching / FoundDocument252 paginiSearching / FoundCBTÎncă nu există evaluări
- The Preparation of Magnetic Nanoparticles For Applications in BiomedicineDocument17 paginiThe Preparation of Magnetic Nanoparticles For Applications in BiomedicineMadavat Prem Pai LópezÎncă nu există evaluări
- Chapter 12: Vibrations and Waves: 12.1 Simple Harmonic MotionDocument5 paginiChapter 12: Vibrations and Waves: 12.1 Simple Harmonic MotionSteven SuÎncă nu există evaluări
- Mod 2 QuestionsDocument49 paginiMod 2 Questionscyder100% (1)
- Unit 2Document3 paginiUnit 2V V Satyanarayana PasupuletiÎncă nu există evaluări
- Atec Manual ElectronicDocument73 paginiAtec Manual ElectronicMinaSaeed67% (3)
- AbaqusDocument1.535 paginiAbaqusKing1971100% (1)
- Determining The Specific Heat Capacity of AirDocument22 paginiDetermining The Specific Heat Capacity of AirSyahrul Ramadhan0% (1)
- Machine Elements 2 (Introduction)Document12 paginiMachine Elements 2 (Introduction)Melinda100% (2)
- Aqa 84031 W MS Jun13 PDFDocument18 paginiAqa 84031 W MS Jun13 PDFdadajee420Încă nu există evaluări
- Chemical Bonding II - VSEPR ModelDocument23 paginiChemical Bonding II - VSEPR ModelYokaris JTÎncă nu există evaluări