S-ar putea să vă placă și
- Hardware Implementations of Digital Fir Filters in FpgaDocument4 paginiHardware Implementations of Digital Fir Filters in Fpgasivaprasad470Încă nu există evaluări
- Digital Spectral Analysis MATLAB® Software User GuideDe la EverandDigital Spectral Analysis MATLAB® Software User GuideÎncă nu există evaluări
- FIR FilterDocument5 paginiFIR FilterManasa UpadhyayaÎncă nu există evaluări
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960De la EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Încă nu există evaluări
- FIR Filter Design On Chip Using VHDL: IPASJ International Journal of Computer Science (IIJCS)Document5 paginiFIR Filter Design On Chip Using VHDL: IPASJ International Journal of Computer Science (IIJCS)International Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Transposed Form FIR Filters: Core Generator ToolDocument13 paginiTransposed Form FIR Filters: Core Generator ToolRabab M AlyÎncă nu există evaluări
- CETCME-2020 - NIET - Vineet ShekherDocument9 paginiCETCME-2020 - NIET - Vineet Shekherडाँ सूर्यदेव चौधरीÎncă nu există evaluări
- Infineon-Component Filter V2.10-Software Module Datasheets-V02 03-EnDocument26 paginiInfineon-Component Filter V2.10-Software Module Datasheets-V02 03-EnHaroon Mohamed MorshedÎncă nu există evaluări
- Building Custom FIR Filters Using System GeneratorDocument4 paginiBuilding Custom FIR Filters Using System Generatordwivedi89Încă nu există evaluări
- A12Document6 paginiA12Usha MaddipatiÎncă nu există evaluări
- Efficient Design Using Fpgas: of Application Specific CoresDocument5 paginiEfficient Design Using Fpgas: of Application Specific CoresK.GurucharanÎncă nu există evaluări
- RII & RIF FiltersDocument13 paginiRII & RIF FiltersMedab Abd El MalekÎncă nu există evaluări
- 36Document74 pagini36Sanoop MkÎncă nu există evaluări
- AN3190Document6 paginiAN3190noopreply5316Încă nu există evaluări
- UG - EC303 DSP Part-9 FIR in C55x PDFDocument27 paginiUG - EC303 DSP Part-9 FIR in C55x PDFAravinth RameshÎncă nu există evaluări
- II IP Core PSK DemodulatorDocument5 paginiII IP Core PSK DemodulatorfvseverÎncă nu există evaluări
- VHDL Code For FIR Filter PDFDocument4 paginiVHDL Code For FIR Filter PDFpankaj5121990Încă nu există evaluări
- Area Efficient Design of Fir Filter Using Symmetric StructureDocument4 paginiArea Efficient Design of Fir Filter Using Symmetric StructureJins ThomasÎncă nu există evaluări
- Fir and Iir Digital Filter Design GuideDocument11 paginiFir and Iir Digital Filter Design Guidecatia_v5rÎncă nu există evaluări
- Welcome To International Journal of Engineering Research and Development (IJERD)Document6 paginiWelcome To International Journal of Engineering Research and Development (IJERD)IJERDÎncă nu există evaluări
- Efficient Design of FIR Filter Using Modified Booth MultiplierDocument5 paginiEfficient Design of FIR Filter Using Modified Booth MultiplierijsretÎncă nu există evaluări
- SHARC Hardware AcceleratorsDocument2 paginiSHARC Hardware Acceleratorsjcxz6053Încă nu există evaluări
- Fpga Implementation of Fir Filter in Signal Processing: AbstractDocument4 paginiFpga Implementation of Fir Filter in Signal Processing: AbstractShafiullaShaikÎncă nu există evaluări
- DSP Imp QuestionDocument22 paginiDSP Imp QuestionDevika KachhawahaÎncă nu există evaluări
- Dire Dawa University Institute of TechnologyDocument28 paginiDire Dawa University Institute of TechnologyAsed ZakirÎncă nu există evaluări
- XC Sysgen43Document3 paginiXC Sysgen43YogeeshHtÎncă nu există evaluări
- Sirisha Kurakula G00831237 ProjectDocument12 paginiSirisha Kurakula G00831237 ProjectSirisha Kurakula0% (1)
- Implementing Bit-Serial Digital Filters in At6000 FpgasDocument9 paginiImplementing Bit-Serial Digital Filters in At6000 FpgasPravesh KharelÎncă nu există evaluări
- DSP Processors: Circular BufferingDocument22 paginiDSP Processors: Circular BufferingfidematÎncă nu există evaluări
- Release NotesDocument17 paginiRelease Notesg401992Încă nu există evaluări
- MT1769 AbstractDocument10 paginiMT1769 AbstractVincent TonÎncă nu există evaluări
- Ijet13 05 03 DFFGGDFDDF321Document8 paginiIjet13 05 03 DFFGGDFDDF321Navathej BangariÎncă nu există evaluări
- Lab 2Document13 paginiLab 2tomsds5310Încă nu există evaluări
- AC 1997paper109 PDFDocument8 paginiAC 1997paper109 PDFFranklin Cardeñoso FernándezÎncă nu există evaluări
- 1 s2.0 S0141933121004920 MainDocument10 pagini1 s2.0 S0141933121004920 MainShylu SamÎncă nu există evaluări
- Multi-Channel Digital Up/Down Converter For Wimax Systems: FeaturesDocument13 paginiMulti-Channel Digital Up/Down Converter For Wimax Systems: FeaturesAmandeep GroverÎncă nu există evaluări
- LUT Optimization Using Combined APC-OMS Technique For Memory-Based ComputationDocument9 paginiLUT Optimization Using Combined APC-OMS Technique For Memory-Based ComputationRaj PrabhasÎncă nu există evaluări
- The Development of The Digital Oscilloscope Based On FPGA PDFDocument8 paginiThe Development of The Digital Oscilloscope Based On FPGA PDFivy_publisherÎncă nu există evaluări
- Altera DDC DucDocument32 paginiAltera DDC DucgpraveenroyÎncă nu există evaluări
- FPGA Implementation of High Speed FIR Filters Using Add and Shift MethodDocument6 paginiFPGA Implementation of High Speed FIR Filters Using Add and Shift Methodpramani90Încă nu există evaluări
- Performance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignDocument8 paginiPerformance Analysis of Reconfigurable Multiplier Unit For FIR Filter DesignInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- Communication System Lecture 3-2Document9 paginiCommunication System Lecture 3-2miro jasimÎncă nu există evaluări
- Continuously Variable Fractional Rate Decimator: Application Note: Virtex-5, Virtex-4, Spartan-3Document11 paginiContinuously Variable Fractional Rate Decimator: Application Note: Virtex-5, Virtex-4, Spartan-3ergatnsÎncă nu există evaluări
- A Master-Slave DSP Board For Digital ControlDocument5 paginiA Master-Slave DSP Board For Digital Controlfurious143Încă nu există evaluări
- Integration of Electronic Speed Governor With RFID Technology For Speed LimitingDocument86 paginiIntegration of Electronic Speed Governor With RFID Technology For Speed LimitingNithinReddy100% (1)
- Design of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalDocument5 paginiDesign of Multiplier Less 32 Tap FIR Filter Using VHDL: JournalIJMERÎncă nu există evaluări
- Enhancing The PCM FM Link Without The MathDocument10 paginiEnhancing The PCM FM Link Without The Mathfp80924Încă nu există evaluări
- Efficient MSP430 Code Synthesis For An FIR Filter: Application ReportDocument12 paginiEfficient MSP430 Code Synthesis For An FIR Filter: Application Reporthanumantha raoÎncă nu există evaluări
- Implementation of Matched FiltersDocument5 paginiImplementation of Matched FiltersAhmed YasserÎncă nu există evaluări
- Fir Compiler XilinxDocument85 paginiFir Compiler Xilinxalisadan_92Încă nu există evaluări
- 2005 Iccc 2Document6 pagini2005 Iccc 2ahmedosama8272Încă nu există evaluări
- Adaptive Traffic Light Control SystemDocument15 paginiAdaptive Traffic Light Control SystemSadaf TajÎncă nu există evaluări
- Class 364: Real Time Embedded Trace For ARMDocument10 paginiClass 364: Real Time Embedded Trace For ARMniku007Încă nu există evaluări
- Received 22 January 2014, Revised 13 May 2015, Online Published 29 May 2015Document6 paginiReceived 22 January 2014, Revised 13 May 2015, Online Published 29 May 2015hariharankalyanÎncă nu există evaluări
- Final Report Scanning Digital RadarDocument27 paginiFinal Report Scanning Digital RadarPrathap SinghÎncă nu există evaluări
- Multirate Filters and Wavelets: From Theory To ImplementationDocument22 paginiMultirate Filters and Wavelets: From Theory To ImplementationAnsari RehanÎncă nu există evaluări
- Filtros Digitales 1Document18 paginiFiltros Digitales 1vervesolarÎncă nu există evaluări
- Biondi3 ARINC PDFDocument7 paginiBiondi3 ARINC PDFAnonymous 3mJfZE100% (1)
- Lecture 7 - PPS (Anna Burack) PDFDocument42 paginiLecture 7 - PPS (Anna Burack) PDFFlaviu MadmaxÎncă nu există evaluări
- Transformers Reference GuideDocument1 paginăTransformers Reference GuideAnonymous 3mJfZEÎncă nu există evaluări
- Application Note Gan Bias Circuit DesignDocument6 paginiApplication Note Gan Bias Circuit DesignAnonymous 3mJfZEÎncă nu există evaluări
- GOM-805 User Maunal EN Rev E 20220331Document162 paginiGOM-805 User Maunal EN Rev E 20220331Anonymous 3mJfZEÎncă nu există evaluări
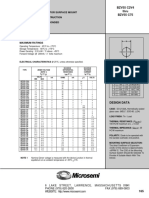
- Zener Diodes - Leadless Package For Surface Mount - Double Plug Construction - Metallurgically BondedDocument2 paginiZener Diodes - Leadless Package For Surface Mount - Double Plug Construction - Metallurgically BondedZohaib SiddiqueÎncă nu există evaluări
- 2017 EMC Fundamentals Guide Low ResDocument37 pagini2017 EMC Fundamentals Guide Low ResAnonymous 3mJfZEÎncă nu există evaluări
- 3M Low Static Polyimide Film Tape 5419: Product DescriptionDocument3 pagini3M Low Static Polyimide Film Tape 5419: Product DescriptionAnonymous 3mJfZEÎncă nu există evaluări
- ICE40 UltraPlus Family Data SheetDocument53 paginiICE40 UltraPlus Family Data SheetAnonymous 3mJfZEÎncă nu există evaluări
- AN-202 - An IC Amplifier User's Guide To Decoupling - Grounding - and Making Things Go Right For A ChangeDocument8 paginiAN-202 - An IC Amplifier User's Guide To Decoupling - Grounding - and Making Things Go Right For A ChangeyusufwpÎncă nu există evaluări
- TPHR7904PB Datasheet en 20180705Document10 paginiTPHR7904PB Datasheet en 20180705Anonymous 3mJfZEÎncă nu există evaluări
- Audio Precision - Application Note: Headphone Electroacoustic MeasurementsDocument26 paginiAudio Precision - Application Note: Headphone Electroacoustic MeasurementsAnonymous 3mJfZEÎncă nu există evaluări
- Drawing OSC8MDocument1 paginăDrawing OSC8MAnonymous 3mJfZEÎncă nu există evaluări
- Assembly and Istruction For neutriCONDocument1 paginăAssembly and Istruction For neutriCONAnonymous 3mJfZEÎncă nu există evaluări
- Plans BlainvilleDocument9 paginiPlans BlainvilleAnonymous 3mJfZEÎncă nu există evaluări
- Off-Cut Remover: Hektor 2Document12 paginiOff-Cut Remover: Hektor 2Anonymous 3mJfZEÎncă nu există evaluări
- Introduction To EMC CompatibilityDocument8 paginiIntroduction To EMC CompatibilityAnonymous 3mJfZEÎncă nu există evaluări
- Guidelines To Understanding Reliability Prediction - MTBF Report - 24 June 2005Document29 paginiGuidelines To Understanding Reliability Prediction - MTBF Report - 24 June 2005lsombrio0% (1)
- TEDocument4 paginiTEAnonymous 3mJfZEÎncă nu există evaluări
- User's Guide: TPS65120EVMĆ076/ TPS65124EVMĆ076Document24 paginiUser's Guide: TPS65120EVMĆ076/ TPS65124EVMĆ076Anonymous 3mJfZEÎncă nu există evaluări
- RowentaVorace PDFDocument4 paginiRowentaVorace PDFAnonymous 3mJfZEÎncă nu există evaluări
- Jabra 1500 QD&USB - TechnSpecsDocument1 paginăJabra 1500 QD&USB - TechnSpecsAnonymous 3mJfZEÎncă nu există evaluări
- NDK Technical Note OscillatorDocument1 paginăNDK Technical Note OscillatorAnonymous 3mJfZEÎncă nu există evaluări
- Prod Info Pica DRY EDocument1 paginăProd Info Pica DRY EAnonymous 3mJfZEÎncă nu există evaluări
- Sierra Wireless AirPrime XM0110 GPS Module Location Plug-In PDFDocument2 paginiSierra Wireless AirPrime XM0110 GPS Module Location Plug-In PDFAnonymous 3mJfZEÎncă nu există evaluări
- Tack Up and Impedance ReportDocument1 paginăTack Up and Impedance ReportAnonymous 3mJfZEÎncă nu există evaluări
- Datasheet Chip LCD Ili9341 PDFDocument245 paginiDatasheet Chip LCD Ili9341 PDFframqzÎncă nu există evaluări
- Hardware 18jul12Document5 paginiHardware 18jul12Victor GonzalezÎncă nu există evaluări
- Choose The Right Data Converter For Your ApplicationDocument78 paginiChoose The Right Data Converter For Your ApplicationAnonymous 3mJfZEÎncă nu există evaluări
- AKAI - 21CT06FS - Chassis - PX20019 PDFDocument19 paginiAKAI - 21CT06FS - Chassis - PX20019 PDFsertecelecÎncă nu există evaluări
- 1987 SAAB 900 Owners Manual German (OCR)Document63 pagini1987 SAAB 900 Owners Manual German (OCR)mnbvqwertÎncă nu există evaluări
- PRB Belt XRef PDFDocument283 paginiPRB Belt XRef PDFBrian RichmondÎncă nu există evaluări
- Motorola's STARLINE Cable Simulator Are Used in Place of Fixed Forward Equalizer in Systems Where The Amplifiers Are Located Close TogetherDocument2 paginiMotorola's STARLINE Cable Simulator Are Used in Place of Fixed Forward Equalizer in Systems Where The Amplifiers Are Located Close TogetherRodrigo AlonzoÎncă nu există evaluări
- APFC Panel DesigningDocument16 paginiAPFC Panel Designingyrmn200% (1)
- Peugeot 3008 EuroNCAPDocument3 paginiPeugeot 3008 EuroNCAPcarbasemyÎncă nu există evaluări
- (TUTORIAL) Unlock Sim Network On Samsung Galaxy Mini S5570, Ace S5830, Gio S5660, Pop I559, Fit S5670Document30 pagini(TUTORIAL) Unlock Sim Network On Samsung Galaxy Mini S5570, Ace S5830, Gio S5660, Pop I559, Fit S5670edwartcano50% (2)
- Presentasi MultimeterDocument41 paginiPresentasi MultimetermdÎncă nu există evaluări
- Specifications, Applications, Service Instructions & Parts: Sealed Motor Valve & ControllersDocument32 paginiSpecifications, Applications, Service Instructions & Parts: Sealed Motor Valve & ControllersDario MoralesÎncă nu există evaluări
- Release Notes For EQSP - 122 - E1 - AI - V2Document9 paginiRelease Notes For EQSP - 122 - E1 - AI - V29 9 9Încă nu există evaluări
- Iitians PaceDocument8 paginiIitians PaceAditya DevÎncă nu există evaluări
- Tabla Eq OsiproxDocument115 paginiTabla Eq OsiproxGERMANÎncă nu există evaluări
- Pierlite Led PanelsDocument4 paginiPierlite Led PanelsAzeemÎncă nu există evaluări
- Spectralert® Series: Horns, Strobes, and Horn/StrobesDocument4 paginiSpectralert® Series: Horns, Strobes, and Horn/Strobesmechengineer3Încă nu există evaluări
- Datasheet: SE-B1, B2, B3, B4Document4 paginiDatasheet: SE-B1, B2, B3, B4Juan GuzmanÎncă nu există evaluări
- Improving Buck Converter Light-Load Efficiency: Power Supply DesignDocument3 paginiImproving Buck Converter Light-Load Efficiency: Power Supply DesignkoolniranÎncă nu există evaluări
- Testing The PIC Microcontroller 16F84ADocument4 paginiTesting The PIC Microcontroller 16F84AMatt Imri100% (2)
- SK720 ManualDocument43 paginiSK720 ManualrandyromÎncă nu există evaluări
- M.tech Advanced Digital Signal ProcessingDocument1 paginăM.tech Advanced Digital Signal ProcessingsrinivasÎncă nu există evaluări
- New Cost-Effective Silicon Carbide High Voltage Switch CreatedDocument2 paginiNew Cost-Effective Silicon Carbide High Voltage Switch CreatedMatejŠarlijaÎncă nu există evaluări
- 20E082-SP Offer ListDocument1 pagină20E082-SP Offer ListghghÎncă nu există evaluări
- Research On Vodafone For IMC ToolsDocument72 paginiResearch On Vodafone For IMC ToolsbandhhathÎncă nu există evaluări
- GC Troubleshooting - GC Troubleshooting - Hints and Tips - Chromatography - ChromservisDocument6 paginiGC Troubleshooting - GC Troubleshooting - Hints and Tips - Chromatography - Chromservisசிவஸ்ரீஹரிÎncă nu există evaluări
- Image Contrast Enhancement Using Combination of DWT & SWT With CLAHEDocument4 paginiImage Contrast Enhancement Using Combination of DWT & SWT With CLAHEIJRASETPublicationsÎncă nu există evaluări
- Howland Current SourceDocument9 paginiHowland Current SourceanugrasÎncă nu există evaluări
- EXFO FTB-1 700G-800 Series Net Blazzer User GuideDocument673 paginiEXFO FTB-1 700G-800 Series Net Blazzer User GuideMohammadBakirÎncă nu există evaluări
- OPAMP FundamentalsDocument16 paginiOPAMP Fundamentalslucky sameeÎncă nu există evaluări
- SM Me411 21 en 01Document97 paginiSM Me411 21 en 01Sulay Avila Llanos100% (1)
- AS372 ManualDocument54 paginiAS372 ManualskcindyÎncă nu există evaluări
- Renoise User ManualDocument244 paginiRenoise User ManualStephen DaviesÎncă nu există evaluări
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDe la EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)De la EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Evaluare: 5 din 5 stele5/5 (1)
- iPhone 15 Pro User Guide for Beginners and SeniorsDe la EverandiPhone 15 Pro User Guide for Beginners and SeniorsÎncă nu există evaluări
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Încă nu există evaluări
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesDe la EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesÎncă nu există evaluări
- Amazon Web Services (AWS) Interview Questions and AnswersDe la EverandAmazon Web Services (AWS) Interview Questions and AnswersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFDe la EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFÎncă nu există evaluări
- Programming with STM32: Getting Started with the Nucleo Board and C/C++De la EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Evaluare: 3.5 din 5 stele3.5/5 (3)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertDe la EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertEvaluare: 3.5 din 5 stele3.5/5 (6)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDe la EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsEvaluare: 5 din 5 stele5/5 (2)
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesDe la EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesÎncă nu există evaluări
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideDe la EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideEvaluare: 1 din 5 stele1/5 (1)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]De la EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Evaluare: 5 din 5 stele5/5 (2)
- Real-Time UML Workshop for Embedded SystemsDe la EverandReal-Time UML Workshop for Embedded SystemsEvaluare: 3.5 din 5 stele3.5/5 (2)
- Raspberry Pi for Python Programmers Cookbook - Second EditionDe la EverandRaspberry Pi for Python Programmers Cookbook - Second EditionÎncă nu există evaluări
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsDe la EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsÎncă nu există evaluări
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XDe la EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XEvaluare: 5 din 5 stele5/5 (1)