S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- EE593Document4 paginiEE593hassanÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- CS4230 L3Document27 paginiCS4230 L3tt_aljobory3911Încă nu există evaluări
- EE 5223 Assn: - Date: - : Jyellajo@mtu - EduDocument1 paginăEE 5223 Assn: - Date: - : Jyellajo@mtu - Edutt_aljobory3911Încă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- CS4230 Parallel Programming: Mary Hall August 21, 2012Document17 paginiCS4230 Parallel Programming: Mary Hall August 21, 2012tt_aljobory3911Încă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- 5223 SylDocument1 pagină5223 SylSaadAbdulBasitÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- CS4230 Parallel Programming Introduction To Parallel AlgorithmsDocument25 paginiCS4230 Parallel Programming Introduction To Parallel Algorithmstt_aljobory3911Încă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- EE379K/EE394V Smart Grids:: Ross Baldick, Department of Electrical and Computer Engineering Spring 2017Document9 paginiEE379K/EE394V Smart Grids:: Ross Baldick, Department of Electrical and Computer Engineering Spring 2017tt_aljobory3911Încă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- San José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013Document6 paginiSan José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013tt_aljobory3911Încă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Syllabus M.tech PSDocument49 paginiSyllabus M.tech PStt_aljobory3911Încă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- EE 378: Smart and Renewable Power: Course OutlineDocument3 paginiEE 378: Smart and Renewable Power: Course Outlinett_aljobory3911Încă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- EE 378: Smart and Renewable Power: Course OutlineDocument3 paginiEE 378: Smart and Renewable Power: Course Outlinett_aljobory3911Încă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Due: November 7, 2002 Reading: ECE 445 Analysis and Design of Power Electronic Circuits Problem Set 7 Fall 2002Document1 paginăDue: November 7, 2002 Reading: ECE 445 Analysis and Design of Power Electronic Circuits Problem Set 7 Fall 2002tt_aljobory3911Încă nu există evaluări
- San José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013Document6 paginiSan José State University College of Engineering Department of Electrical Engineering EE239 Smart Grid, Fall 2013tt_aljobory3911Încă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- EE593Document4 paginiEE593hassanÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Case 1:-Fixed Subnet MaskDocument6 paginiCase 1:-Fixed Subnet Masktt_aljobory3911Încă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Z TransformDocument20 paginiZ TransformMxaz MyzxÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- 01 Architecture 1Document45 pagini01 Architecture 1tt_aljobory3911Încă nu există evaluări
- 2017 E-Health and Bioengineering Conference (EHB)Document2 pagini2017 E-Health and Bioengineering Conference (EHB)tt_aljobory3911Încă nu există evaluări
- 2-Table of ContentsDocument10 pagini2-Table of Contentstt_aljobory3911Încă nu există evaluări
- 3 Authors IndexDocument11 pagini3 Authors Indextt_aljobory3911Încă nu există evaluări
- Publication 4 18108 6175Document5 paginiPublication 4 18108 6175tt_aljobory3911Încă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- CIS197-12b Fall - SyllabusDocument4 paginiCIS197-12b Fall - Syllabustt_aljobory3911Încă nu există evaluări
- Problem Set 2Document1 paginăProblem Set 2tt_aljobory3911Încă nu există evaluări
- 4 PublicationDocument6 pagini4 Publicationtt_aljobory3911Încă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- 6 PDFDocument4 pagini6 PDFtt_aljobory3911Încă nu există evaluări
- IC Design of Power Management Circuits (I)Document40 paginiIC Design of Power Management Circuits (I)tt_aljobory3911Încă nu există evaluări
- Sample Midterm 1Document3 paginiSample Midterm 1tt_aljobory3911Încă nu există evaluări
- CH 2 SlideDocument45 paginiCH 2 Slidemukesh00007Încă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- 11 EE462L H Bridge InverterDocument5 pagini11 EE462L H Bridge Invertertt_aljobory3911Încă nu există evaluări
- Midterm1 PDFDocument3 paginiMidterm1 PDFtt_aljobory3911Încă nu există evaluări
- The Development of Robot Arm With Smartphone Control Using ArduinoDocument8 paginiThe Development of Robot Arm With Smartphone Control Using Arduinodavid frybergÎncă nu există evaluări
- DVD Home Cinema System: Owner'S ManualDocument45 paginiDVD Home Cinema System: Owner'S ManualDiego MarroquínÎncă nu există evaluări
- E-Globe G2 User Guide S-63 1.1Document23 paginiE-Globe G2 User Guide S-63 1.1krupa kumar100% (1)
- Digital Communication Chapter 11Document5 paginiDigital Communication Chapter 11MIsh GomezÎncă nu există evaluări
- FALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I Unit-3lecture3Document7 paginiFALLSEM2018-19 CSE2001 TH SJT502 VL2018191005001 Reference Material I Unit-3lecture3Abhradeep Nag 16BEE0087Încă nu există evaluări
- Wiring Digram For ACDocument3 paginiWiring Digram For ACahmed HOSNYÎncă nu există evaluări
- NERD 9 and 12 Function InstructionsDocument64 paginiNERD 9 and 12 Function InstructionsknogmanualsÎncă nu există evaluări
- Chemtrol Samil - Instrument D/SDocument48 paginiChemtrol Samil - Instrument D/SAnonymous OFP2ygPIdÎncă nu există evaluări
- 55 M.Tech - Nano TechnologyDocument11 pagini55 M.Tech - Nano TechnologyMuraleetharan_BÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- IEEE STD 404-2012Document46 paginiIEEE STD 404-2012anonimoefra100% (1)
- CSSR Optimization For GSM and WCDMADocument30 paginiCSSR Optimization For GSM and WCDMAmosesÎncă nu există evaluări
- Transformador Pad Mounted ABBDocument12 paginiTransformador Pad Mounted ABBJuan E Torres MÎncă nu există evaluări
- Single Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerDocument11 paginiSingle Phase Induction Motor Adjustable Speed Control Using DSP and Micro-ControllerRajan GuptaÎncă nu există evaluări
- TINA 10 ManualDocument241 paginiTINA 10 ManualjpntjpntÎncă nu există evaluări
- Bridgewater HallDocument4 paginiBridgewater HallHuzaifa J AhmedabadwalaÎncă nu există evaluări
- Datasheet - H8CA-SAL OMRON - MÁQ FEZERDocument15 paginiDatasheet - H8CA-SAL OMRON - MÁQ FEZERMarcelo Vitali PagnussattÎncă nu există evaluări
- Babu Banarasi Das National Institute of Technology and Management LucknowDocument11 paginiBabu Banarasi Das National Institute of Technology and Management LucknowPrajjwalKumarÎncă nu există evaluări
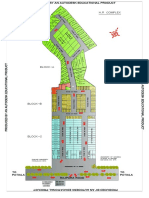
- H.R Complex: Rajpura Road TO Patiala TO PatialaDocument1 paginăH.R Complex: Rajpura Road TO Patiala TO Patialaprabhjeet singh antalÎncă nu există evaluări
- Experiment 8: FM DemodulatorDocument20 paginiExperiment 8: FM Demodulatorslay17Încă nu există evaluări
- DownloadDocument6 paginiDownloadKeyur GandhiÎncă nu există evaluări
- Remove - Install Electronic Selector Lever Module (ESM)Document2 paginiRemove - Install Electronic Selector Lever Module (ESM)esquisofÎncă nu există evaluări
- CMMP AS M0 HW - 2015 07b - 8046779g1Document122 paginiCMMP AS M0 HW - 2015 07b - 8046779g1Bruno Eduardo Tumbaco ToalaÎncă nu există evaluări
- Load Cells Ideas and TipsDocument15 paginiLoad Cells Ideas and Tipsestebanshadow1Încă nu există evaluări
- Köhler Illumination: PrinciplesDocument3 paginiKöhler Illumination: PrinciplesGiovany Marín100% (1)
- Nice Cat Screen enDocument214 paginiNice Cat Screen enBranErikÎncă nu există evaluări
- Experiment No: 1 Date: / / 20Document20 paginiExperiment No: 1 Date: / / 20programmerÎncă nu există evaluări
- 02 Ra41332en50gla1 Lte Kpi ArchitectureDocument87 pagini02 Ra41332en50gla1 Lte Kpi Architecturekhanhnam0509100% (3)
- Substation Construction Project. Project ScheduleDocument12 paginiSubstation Construction Project. Project ScheduleBishnu Chapagai50% (2)
- LHP-30D Datasheet 20170904Document2 paginiLHP-30D Datasheet 20170904Ranses RomanÎncă nu există evaluări
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDe la EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsÎncă nu există evaluări
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)De la EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Evaluare: 5 din 5 stele5/5 (1)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)