S-ar putea să vă placă și
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- JSSM 15 IDocument1 paginăJSSM 15 IEdoardo BianchiÎncă nu există evaluări
- L-34 (SM) (Ia&c) ( (Ee) Nptel)Document15 paginiL-34 (SM) (Ia&c) ( (Ee) Nptel)Marvin BayanayÎncă nu există evaluări
- JSSM 15 208Document6 paginiJSSM 15 208Edoardo BianchiÎncă nu există evaluări
- Teoria Variadores de FrecuencuiaDocument12 paginiTeoria Variadores de FrecuencuiaasotozuazuaÎncă nu există evaluări
- Analysis and Simulation of The Gearshift Methodology For A Novel Two-Speed Transmission System For Electric Powertrains With Central MotorDocument46 paginiAnalysis and Simulation of The Gearshift Methodology For A Novel Two-Speed Transmission System For Electric Powertrains With Central MotorEdoardo BianchiÎncă nu există evaluări
- 348537Document11 pagini348537Edoardo BianchiÎncă nu există evaluări
- c1Document43 paginic1Tom MOt'sÎncă nu există evaluări
- Writing A Short Literature ReviewDocument15 paginiWriting A Short Literature ReviewswatagodaÎncă nu există evaluări
- Simulation and Speed Control of Induction MotorDocument76 paginiSimulation and Speed Control of Induction MotorNWALLL67% (3)
- RE Old Exams, by Chapter 2zDocument1 paginăRE Old Exams, by Chapter 2zEdoardo BianchiÎncă nu există evaluări
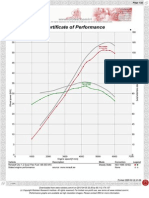
- STR 09020901 KW NM CDocument2 paginiSTR 09020901 KW NM CEdoardo BianchiÎncă nu există evaluări
- The Timing of Postexercise Protein Ingestion Is-Is Not ImportantDocument5 paginiThe Timing of Postexercise Protein Ingestion Is-Is Not ImportantEdoardo BianchiÎncă nu există evaluări
- Bi Sheiko Online TranslationDocument209 paginiBi Sheiko Online TranslationFatman XÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Volvo Service Manual Trucks FM FH PDFDocument244 paginiVolvo Service Manual Trucks FM FH PDFMarco Diaz100% (2)
- RFU-RST-027 Noise Conformity AssessmentDocument5 paginiRFU-RST-027 Noise Conformity AssessmentЛюбомир РангеловÎncă nu există evaluări
- Master SGP OKTDocument359 paginiMaster SGP OKThendro weiÎncă nu există evaluări
- Aircraft Landing Gear TypesDocument6 paginiAircraft Landing Gear TypesRajesh KumarÎncă nu există evaluări
- Engine faults, causes and remedies chartDocument1 paginăEngine faults, causes and remedies chartPabsepulvÎncă nu există evaluări
- AW109 Power: Proven Performance, WorldwideDocument5 paginiAW109 Power: Proven Performance, WorldwideLavern P. SipinÎncă nu există evaluări
- Pa31t, Pa-31t1, Pa-31t2Document1.437 paginiPa31t, Pa-31t1, Pa-31t2Maicon Franca100% (1)
- RACENEWSDocument7 paginiRACENEWSDarwin David Palma BlancaÎncă nu există evaluări
- Diesel Injector Coding and Pilot LearningDocument3 paginiDiesel Injector Coding and Pilot LearningddaanniieellssaaÎncă nu există evaluări
- Toyota YarisDocument3 paginiToyota YarisGregor TeskacÎncă nu există evaluări
- 4 Mechanical StructureDocument33 pagini4 Mechanical StructurecherifÎncă nu există evaluări
- Electric Door Actuator for BusesDocument2 paginiElectric Door Actuator for BusesClodoaldo FonsecaÎncă nu există evaluări
- Audi TT MKI 1.8T & VW Mkiv 1.8T: Timing Belt InstallationDocument20 paginiAudi TT MKI 1.8T & VW Mkiv 1.8T: Timing Belt InstallationBoth JánosÎncă nu există evaluări
- Electronic Rotary Throttle 973 000 seriesDocument7 paginiElectronic Rotary Throttle 973 000 seriesPablo Antu Manque RodriguezÎncă nu există evaluări
- Deutz-Fahr - Serie 5g - Nd-BaDocument24 paginiDeutz-Fahr - Serie 5g - Nd-BaJosipÎncă nu există evaluări
- Advance IC Engine Assignment - 81,82,84Document4 paginiAdvance IC Engine Assignment - 81,82,84Somesh SaurabhÎncă nu există evaluări
- Naloop Bikestability-ForkrakeDocument5 paginiNaloop Bikestability-Forkrakevignesh kumarÎncă nu există evaluări
- Diagrama Hidráulico - Case Af 4150Document1 paginăDiagrama Hidráulico - Case Af 4150Geovanni MarconÎncă nu există evaluări
- Alluxindo Pratama Sukses Mining Equipment ListDocument1 paginăAlluxindo Pratama Sukses Mining Equipment ListArdi dutaÎncă nu există evaluări
- AMO certificate holder record keeping requirementsDocument6 paginiAMO certificate holder record keeping requirementsMunir DirgantaraÎncă nu există evaluări
- Introduction To Vehicle Dynamics Using Matlab: Module 1: Suspension Design Week 2-08/05/2017, 08/06/2017Document39 paginiIntroduction To Vehicle Dynamics Using Matlab: Module 1: Suspension Design Week 2-08/05/2017, 08/06/2017Saswat pandaÎncă nu există evaluări
- CD Deluxe Parts Catalog E-SectionsDocument82 paginiCD Deluxe Parts Catalog E-SectionsjackcastelÎncă nu există evaluări
- Accelerator Cable Reference Guide for Jeep, Chevrolet, BMW, and MoreDocument116 paginiAccelerator Cable Reference Guide for Jeep, Chevrolet, BMW, and MoreCecilia GilÎncă nu există evaluări
- Injection Pump Specification ©Document4 paginiInjection Pump Specification ©admin tigasaudaraÎncă nu există evaluări
- ST6C740Document238 paginiST6C740Ermilo LopezÎncă nu există evaluări
- Marketing Research On Tesla Inc. - Strategic Analysis: PresentationDocument28 paginiMarketing Research On Tesla Inc. - Strategic Analysis: PresentationDarshan KasundraÎncă nu există evaluări
- Parts Catalog: TT 55 Export Model (4WD)Document292 paginiParts Catalog: TT 55 Export Model (4WD)CENTURYBROTHER100% (1)
- RocketsDocument2 paginiRocketsAlin VoicuÎncă nu există evaluări
- 42Document3 pagini42geovane silvaÎncă nu există evaluări
- Suzuki 56110-65JG4 ABS Brake Assy With ESP On Grand Vitara JT Type2 2005Document4 paginiSuzuki 56110-65JG4 ABS Brake Assy With ESP On Grand Vitara JT Type2 20052bjornÎncă nu există evaluări