S-ar putea să vă placă și
- Chemical Bonding MCQDocument15 paginiChemical Bonding MCQVinay Krishna Kodali50% (4)
- Understanding Vector Calculus: Practical Development and Solved ProblemsDe la EverandUnderstanding Vector Calculus: Practical Development and Solved ProblemsÎncă nu există evaluări
- Cylinders of The PharaohDocument18 paginiCylinders of The PharaohiguandiánÎncă nu există evaluări
- Design and Analysis of AlgorithmDocument116 paginiDesign and Analysis of AlgorithmKunal JanjiralaÎncă nu există evaluări
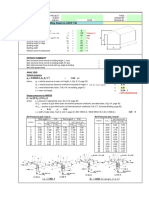
- Wind Analysis For Low-Rise Building, Based On ASCE 7-98Document2 paginiWind Analysis For Low-Rise Building, Based On ASCE 7-98reynoldÎncă nu există evaluări
- SchmertmannDocument13 paginiSchmertmannkabasy20150% (1)
- Aashto T 99-81Document7 paginiAashto T 99-81ORUSÎncă nu există evaluări
- ANSYS FLUENT Population Balance Module ManualDocument80 paginiANSYS FLUENT Population Balance Module ManualGokul PrabuÎncă nu există evaluări
- EM Wave Propagation at Media InterfaceDocument35 paginiEM Wave Propagation at Media InterfaceArchana TripathiÎncă nu există evaluări
- Blocked Rotor TestDocument11 paginiBlocked Rotor TestIjabi100% (1)
- Finite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringDocument27 paginiFinite Element Method Prof C. S. Upadhyay Department of Mechanical EngineeringabimanaÎncă nu există evaluări
- Functions of Complex Variables Part 1Document35 paginiFunctions of Complex Variables Part 1Ankit KumarÎncă nu există evaluări
- Line IntegralDocument10 paginiLine IntegralRomesor ApolÎncă nu există evaluări
- Aero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Document26 paginiAero Elasticity Prof. C.V. Venkatesan Department of Aerospace Engineering Indian Institute of Technology, Kanpur Lecture - 3Sayan PalÎncă nu există evaluări
- B.Tech Physics Course NIT Jalandhar Electrostatics Lecture 1Document45 paginiB.Tech Physics Course NIT Jalandhar Electrostatics Lecture 1Jaspreet Singh SidhuÎncă nu există evaluări
- Lagrange's Equations PDFDocument26 paginiLagrange's Equations PDFDebkanta DasÎncă nu există evaluări
- Classical Mechanics: From Newtonian To Lagrangian FormulationDocument9 paginiClassical Mechanics: From Newtonian To Lagrangian Formulationchirag jainÎncă nu există evaluări
- Electrical Circuit Analysis Using Phasor DiagramsDocument26 paginiElectrical Circuit Analysis Using Phasor DiagramsDaniel CicognaÎncă nu există evaluări
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 paginiComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpurk krishna chaitanyaÎncă nu există evaluări
- Lec 43Document10 paginiLec 43sixfacerajÎncă nu există evaluări
- Linear and Volumetric Deformation Perspectives From Mass ConservationDocument10 paginiLinear and Volumetric Deformation Perspectives From Mass ConservationghulamhabibscmeÎncă nu există evaluări
- Theoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleDocument12 paginiTheoretical Mechanics Prof. Charudatt Kadolkar Department of Physics Indian Institute of Technology-Guwahati Lecture - 04 D'Alembert's PrincipleHow to do anything By HimanshuÎncă nu există evaluări
- Lec 12Document23 paginiLec 12Utkarsh VermaÎncă nu există evaluări
- NPTEL FEM Lec6Document29 paginiNPTEL FEM Lec6EliÎncă nu există evaluări
- Dynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurDocument16 paginiDynamics of Machines Prof - Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, KanpurIshu GoelÎncă nu există evaluări
- Electric Field Due to Infinite Line ChargeDocument9 paginiElectric Field Due to Infinite Line ChargetasleemÎncă nu există evaluări
- Advanced Engineering Mathematics Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurDocument16 paginiAdvanced Engineering Mathematics Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurdaniÎncă nu există evaluări
- Lec2 PDFDocument32 paginiLec2 PDFBELAL ALSUBARIÎncă nu există evaluări
- Lec 25Document14 paginiLec 25manujÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument22 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaÎncă nu există evaluări
- Lec 10Document36 paginiLec 10vidhya dsÎncă nu există evaluări
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Document35 paginiClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 35Anonymous 8f2veZfÎncă nu există evaluări
- Lec 22Document15 paginiLec 22shailiayushÎncă nu există evaluări
- Lecture 10 - Basic TransformDocument27 paginiLecture 10 - Basic TransformvespubekÎncă nu există evaluări
- Nuclear ScatteringDocument19 paginiNuclear ScatteringUmesh YadavaÎncă nu există evaluări
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 paginiMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesÎncă nu există evaluări
- Lec3 1 PDFDocument13 paginiLec3 1 PDFsuhail khanÎncă nu există evaluări
- Advanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasDocument20 paginiAdvanced Finite Element Analysis Prof. R. Krishnakumar Department of Mechanical Engineering Indian Institute of Technology, MadrasabimanaÎncă nu există evaluări
- Lec 4Document20 paginiLec 4pbhanududiÎncă nu există evaluări
- Curl and DivergenceDocument5 paginiCurl and DivergenceChernet TugeÎncă nu există evaluări
- Lec 59Document21 paginiLec 59Elisée NdjabuÎncă nu există evaluări
- Lec 12Document27 paginiLec 12Anonymous xwnUMzSQUÎncă nu există evaluări
- Refer Slide Time: 00:14Document10 paginiRefer Slide Time: 00:14nooredinqadiriÎncă nu există evaluări
- Finite Element Method Mod-3 Lec-2Document20 paginiFinite Element Method Mod-3 Lec-2PSINGH02Încă nu există evaluări
- Lec 8Document21 paginiLec 8Utkarsh VermaÎncă nu există evaluări
- Lec 22Document13 paginiLec 22Ravinder Reddy SimalaÎncă nu există evaluări
- EM Waves Basics of VectorsDocument24 paginiEM Waves Basics of VectorsDiego EndaraÎncă nu există evaluări
- Finite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, MadrasDocument35 paginiFinite Element Analysis Prof. Dr.B.N.Rao Department of Civil Engineering Indian Institute of Technology, Madrasshrikant belsareÎncă nu există evaluări
- Applied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesDocument27 paginiApplied Mechanics Prof. R. K. Mittal Department of Applied Mechanics Indian Institute of Technology, Delhi Lecture No. 10 Properties of SurfacesBELAL ALSUBARIÎncă nu există evaluări
- Lec14 4 PDFDocument13 paginiLec14 4 PDFDharmendra JainÎncă nu există evaluări
- Engineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIDocument25 paginiEngineering Mechanics Prof. Manoj Harbola Indian Institute of Technology, Kanpur Module - 03 Lecture - 03 Properties of Surfaces - IIIlechu-92Încă nu există evaluări
- Fluid Mechanics Prof. T.I. Eldho Department of Civil Engineering Indian Institute of Technology, BombayDocument30 paginiFluid Mechanics Prof. T.I. Eldho Department of Civil Engineering Indian Institute of Technology, BombayNestor Augusto OyarceÎncă nu există evaluări
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDocument9 paginiMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everÎncă nu există evaluări
- KL TransformDocument22 paginiKL TransformPrasanna Kumar Kottakota100% (1)
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Document29 paginiClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Anonymous 8f2veZfÎncă nu există evaluări
- Computer Vision Lecture - Image Transform PropertiesDocument21 paginiComputer Vision Lecture - Image Transform PropertiesElisée NdjabuÎncă nu există evaluări
- Lec 7Document23 paginiLec 7Utkarsh VermaÎncă nu există evaluări
- Lec 5Document23 paginiLec 5abimanaÎncă nu există evaluări
- Advanced Strength of Materials Prof. S.K. Maiti Department of Mechanical Engineering Indian Institute of Technology, Bombay Lecture - 39Document17 paginiAdvanced Strength of Materials Prof. S.K. Maiti Department of Mechanical Engineering Indian Institute of Technology, Bombay Lecture - 39Shital ChaudhariÎncă nu există evaluări
- Lec 47Document4 paginiLec 47raj kumarÎncă nu există evaluări
- Networks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 23Document25 paginiNetworks and Systems Profvgkmurti Department of Electrical Engineering Indian Institute of Technology, Madras Lecture - 23PrateekBansalÎncă nu există evaluări
- Statics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Document9 paginiStatics and Dynamics Dr. Mahesh V. Panchagnula Department of Applied Mechanics Indian Institute of Technology, Madras Lecture - 33Dharmendra JainÎncă nu există evaluări
- Lec 4Document24 paginiLec 4Priyank SrivastavaÎncă nu există evaluări
- IntroductionToRobotics Lecture06 PDFDocument12 paginiIntroductionToRobotics Lecture06 PDFY.EbadiÎncă nu există evaluări
- Lec19 PDFDocument22 paginiLec19 PDFdurgaraokamireddyÎncă nu există evaluări
- INGLES - Resumen 3.1 Calculo VectorialDocument3 paginiINGLES - Resumen 3.1 Calculo VectorialGERSAIN SANCHEZ MORALESÎncă nu există evaluări
- Lec26 PDFDocument17 paginiLec26 PDFRakesh Kumar RautarayÎncă nu există evaluări
- Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurDocument18 paginiComputational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, KharagpurRanganathan .kÎncă nu există evaluări
- Calc Essay 2Document10 paginiCalc Essay 2api-450485203Încă nu există evaluări
- Computer Networks Ultra Short NotesDocument11 paginiComputer Networks Ultra Short NotesVishnu ShashankÎncă nu există evaluări
- Docker Tutorials PDFDocument6 paginiDocker Tutorials PDFVishnu ShashankÎncă nu există evaluări
- Brochure PDFDocument5 paginiBrochure PDFVishnu ShashankÎncă nu există evaluări
- NOTESDocument25 paginiNOTESAshfaq AhmedÎncă nu există evaluări
- Docker Tutorials PDFDocument6 paginiDocker Tutorials PDFVishnu ShashankÎncă nu există evaluări
- Develop With Docker: PrerequisitesDocument2 paginiDevelop With Docker: PrerequisitesVishnu ShashankÎncă nu există evaluări
- Brochure PDFDocument5 paginiBrochure PDFVishnu ShashankÎncă nu există evaluări
- Lec 1Document12 paginiLec 1Priyamvada VermaÎncă nu există evaluări
- Module 2: Transmission Lines Lecture 9: Graphical Approach For Transmission AnalysisDocument7 paginiModule 2: Transmission Lines Lecture 9: Graphical Approach For Transmission AnalysisNaga LakshmaiahÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 29Document40 paginiTransmission Lines and E.M. Waves Lec 29Vishnu ShashankÎncă nu există evaluări
- Syllabi GATE2017 PDFDocument73 paginiSyllabi GATE2017 PDFAnkit Kumar AJÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 26Document34 paginiTransmission Lines and E.M. Waves Lec 26Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 27Document30 paginiTransmission Lines and E.M. Waves Lec 27Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 25Document20 paginiTransmission Lines and E.M. Waves Lec 25Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 28Document32 paginiTransmission Lines and E.M. Waves Lec 28Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 24Document22 paginiTransmission Lines and E.M. Waves Lec 24Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 23Document20 paginiTransmission Lines and E.M. Waves Lec 23Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 20Document30 paginiTransmission Lines and E.M. Waves Lec 20Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 22Document20 paginiTransmission Lines and E.M. Waves Lec 22Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 16Document23 paginiTransmission Lines and E.M. Waves Lec 16Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 21Document19 paginiTransmission Lines and E.M. Waves Lec 21Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 19Document27 paginiTransmission Lines and E.M. Waves Lec 19Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 13Document18 paginiTransmission Lines and E.M. Waves Lec 13Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 10Document31 paginiTransmission Lines and E.M. Waves Lec 10Vishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 18Document24 paginiTransmission Lines and E.M. Waves Lec 18Vishnu ShashankÎncă nu există evaluări
- Measure Unknown Impedance Using Transmission LineDocument21 paginiMeasure Unknown Impedance Using Transmission LineVishnu ShashankÎncă nu există evaluări
- Transmission Lines and E.M. Waves Lec 14Document18 paginiTransmission Lines and E.M. Waves Lec 14Vishnu ShashankÎncă nu există evaluări
- EE207 Problem Set 1Document2 paginiEE207 Problem Set 1Rishabh AgarwalÎncă nu există evaluări
- Flange CouplingDocument16 paginiFlange CouplingARUN VÎncă nu există evaluări
- CK Osborne Reynolds PDFDocument4 paginiCK Osborne Reynolds PDFChaminduKrishanRupasingheÎncă nu există evaluări
- Fire DetectionDocument81 paginiFire DetectionKah HomÎncă nu există evaluări
- Practice paper (2021-22) Term 1 Physics (042) Class xiDocument12 paginiPractice paper (2021-22) Term 1 Physics (042) Class xiNagendra PrasadÎncă nu există evaluări
- Change of Order of IntegrationDocument4 paginiChange of Order of IntegrationShubham Teju100% (2)
- D Shirmohammadi - A Compensation-Based Power Flo Method - IEEE TPS - 1998 - ConsultDocument10 paginiD Shirmohammadi - A Compensation-Based Power Flo Method - IEEE TPS - 1998 - ConsultJorge Luis Vega HerreraÎncă nu există evaluări
- Biazar Aminikhah Burgers EquationDocument7 paginiBiazar Aminikhah Burgers EquationSaeb AmirAhmadi ChomacharÎncă nu există evaluări
- Inelastic Seismic Performance of RC Tall Piers With Hollow SectionDocument8 paginiInelastic Seismic Performance of RC Tall Piers With Hollow SectionMadhurimaMitraÎncă nu există evaluări
- Lang SethDocument52 paginiLang Sethrrmerlin_2Încă nu există evaluări
- G1 Group 1CDocument72 paginiG1 Group 1CNH SyzlnÎncă nu există evaluări
- Voltage and Frequency Control of Inverters Connected in Parallel Forming A Micro-GridDocument6 paginiVoltage and Frequency Control of Inverters Connected in Parallel Forming A Micro-GridShad Rahman100% (1)
- Troskie HJ Chapter 2Document87 paginiTroskie HJ Chapter 2Saran KuttyÎncă nu există evaluări
- Structural Control System for Water TankDocument4 paginiStructural Control System for Water TankJOSMRIVERCÎncă nu există evaluări
- Finding Binary Azeotropes Using Thermodynamic RelationshipsDocument7 paginiFinding Binary Azeotropes Using Thermodynamic Relationshipsshinta sariÎncă nu există evaluări
- Partial Differential Equations Muzammil Tanveer PDFDocument173 paginiPartial Differential Equations Muzammil Tanveer PDFM Irfan IqbalÎncă nu există evaluări
- 2 Alternating CurrentsDocument20 pagini2 Alternating CurrentsJaseela NaufalÎncă nu există evaluări
- DividersDocument7 paginiDividersVenkatesh KarriÎncă nu există evaluări
- Unit 15 - Reaction Rates and EquilibriumDocument68 paginiUnit 15 - Reaction Rates and EquilibriumGarett Berumen-RoqueÎncă nu există evaluări
- Shown.: Example: Determine The Vertical and Horizontal Deflections at The Point B of The TrussDocument3 paginiShown.: Example: Determine The Vertical and Horizontal Deflections at The Point B of The TrussNitin rajputÎncă nu există evaluări
- Mechanisms Design L 2-1 IntroductionStructural Analysis of MechanismsDocument24 paginiMechanisms Design L 2-1 IntroductionStructural Analysis of MechanismsaliÎncă nu există evaluări
- Energy Balance CalculationDocument2 paginiEnergy Balance CalculationSzelee KuekÎncă nu există evaluări