S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Gear Noise PDFDocument29 paginiGear Noise PDFwhereareyoudearÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- R ProgrammingDocument1 paginăR ProgrammingwhereareyoudearÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- Modeling of Wheels and TiresDocument8 paginiModeling of Wheels and TireswhereareyoudearÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- CE 533 FEA Lecture PDFDocument7 paginiCE 533 FEA Lecture PDFwhereareyoudearÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Conceptual Car Design at BMW With Focus On NVH Performance: Dr. Manfred Kroiss (IABG)Document13 paginiConceptual Car Design at BMW With Focus On NVH Performance: Dr. Manfred Kroiss (IABG)whereareyoudearÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Find and Classify Critical Points: XX Yy 2 Xy 0 0Document2 paginiFind and Classify Critical Points: XX Yy 2 Xy 0 0whereareyoudearÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Subject - Faculty - No of GATE Questions Discussed Duration SignDocument1 paginăSubject - Faculty - No of GATE Questions Discussed Duration SignwhereareyoudearÎncă nu există evaluări
- Faculty Recruitment: Professors, Assistant Professors & LecturersDocument1 paginăFaculty Recruitment: Professors, Assistant Professors & LecturerswhereareyoudearÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- 5 Industrial Noise and Vibrations ControlDocument81 pagini5 Industrial Noise and Vibrations ControlSreetheja NarlaÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Examples of Data Manipulation in SPSS: OperatorsDocument6 paginiExamples of Data Manipulation in SPSS: OperatorsSajid AhmadÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grade 9 Academic Math - Exponent LawsDocument2 paginiGrade 9 Academic Math - Exponent LawsKiki Eds100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Solomon - Negative NRG in QEDDocument9 paginiSolomon - Negative NRG in QEDHomers SimpsonÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- RPRTDocument9 paginiRPRTAshish PaudelÎncă nu există evaluări
- A - B - C - D .: Answer: ExplanationDocument11 paginiA - B - C - D .: Answer: ExplanationmanigandanÎncă nu există evaluări
- New Integral TransformDocument6 paginiNew Integral TransformBhupender SinghÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- MCQs Bank Math 4,5,6 (HSSC-II)Document4 paginiMCQs Bank Math 4,5,6 (HSSC-II)علینہ شاہÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Pass Math 1505 Mock Test 1 (Summer 2019)Document4 paginiPass Math 1505 Mock Test 1 (Summer 2019)Magishaa ThiyagarajahÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Do Historians Endorse Unguru PolarityDocument37 paginiDo Historians Endorse Unguru PolarityHumberto ClímacoÎncă nu există evaluări
- MCQ Worksheet-I: Class X: Chapter - 2 PolynomialsDocument1 paginăMCQ Worksheet-I: Class X: Chapter - 2 PolynomialsMehul MayankÎncă nu există evaluări
- Automatic Control Systems B C KUODocument671 paginiAutomatic Control Systems B C KUOshahnawaz khanÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- How We Say Numbers and Symbols in EnglishDocument7 paginiHow We Say Numbers and Symbols in EnglishTim CooperÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- Cbse Class 10 Ncert Maths Book Pair of Linear Equations in Two Variables Chapter 3Document32 paginiCbse Class 10 Ncert Maths Book Pair of Linear Equations in Two Variables Chapter 3Sushameendra Simha VÎncă nu există evaluări
- Discrete - Time System and AnalysisDocument113 paginiDiscrete - Time System and Analysisapaijas0% (2)
- SC Chap4 Fall 2016Document43 paginiSC Chap4 Fall 2016Mohammed AliÎncă nu există evaluări
- Chapter10 Flight Control SystemDocument11 paginiChapter10 Flight Control SystemmsrchandÎncă nu există evaluări
- P&C dpp-2 PDFDocument3 paginiP&C dpp-2 PDFSai GokulÎncă nu există evaluări
- FPGAArithmetic XilinxDocument96 paginiFPGAArithmetic Xilinxksreddy2002Încă nu există evaluări
- Useful GRE FormulaeDocument22 paginiUseful GRE Formulaeyogeshshivani6914100% (1)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Bba-Fundamentals of Business MathematicsDocument45 paginiBba-Fundamentals of Business Mathematicswork tÎncă nu există evaluări
- Padre ManualDocument100 paginiPadre ManualJay ChulaniÎncă nu există evaluări
- Sampling DistributionDocument25 paginiSampling DistributionAbhi NaiduÎncă nu există evaluări
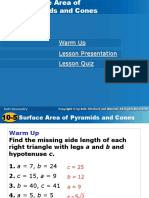
- Warm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometryDocument34 paginiWarm Up Lesson Presentation Lesson Quiz: Holt Geometry Holt GeometrymdmemaÎncă nu există evaluări
- Lecture 14Document38 paginiLecture 14Fahad DarÎncă nu există evaluări
- Math 100 - Exercises - On - Chap - 1Document4 paginiMath 100 - Exercises - On - Chap - 1Yohannis KidanuÎncă nu există evaluări
- Cie Igcse o Level Maths Topic 4Document24 paginiCie Igcse o Level Maths Topic 4Nayeem HakimÎncă nu există evaluări
- Solution Most Important PYQs Vector Algebra JEE Main Crash Course MathonGoDocument11 paginiSolution Most Important PYQs Vector Algebra JEE Main Crash Course MathonGoegregiously talentedÎncă nu există evaluări
- Writeup-Individual Assignment - 1Document10 paginiWriteup-Individual Assignment - 1Minu kumariÎncă nu există evaluări
- Me - 1 Gtu Cad/cam SyllabusDocument3 paginiMe - 1 Gtu Cad/cam SyllabusKumar BhattÎncă nu există evaluări
- Classnotes - Coursework of OptimizationDocument14 paginiClassnotes - Coursework of OptimizationHudzaifa AhnafÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)