S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- t6010 PDFDocument412 paginit6010 PDFPapy Plus100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Valve Body Identification Guide Valve Body Identifi Cation GuideDocument11 paginiValve Body Identification Guide Valve Body Identifi Cation GuideUlloaEliasÎncă nu există evaluări
- A Seminar Report On Water Cooled ChillerDocument15 paginiA Seminar Report On Water Cooled ChillerSudip Sharma100% (3)
- ABB OLTC-Technical GuideDocument32 paginiABB OLTC-Technical GuideKrishna Venkataraman100% (5)
- Honda CRZ 2011 2012 Service ManualDocument20 paginiHonda CRZ 2011 2012 Service Manualdonna100% (49)
- Ejector PinsDocument21 paginiEjector PinssyazwanmahadzirÎncă nu există evaluări
- Service KitDocument15 paginiService KitAbhinav VermaÎncă nu există evaluări
- Proportional Hydraulics Basic Level - Workbook - EN (TP 701) PDFDocument144 paginiProportional Hydraulics Basic Level - Workbook - EN (TP 701) PDFLong Vu BuiÎncă nu există evaluări
- Engine Mechanical SectionDocument202 paginiEngine Mechanical Sectionionbolo100% (2)
- Furmanite Datasheet For FittingDocument8 paginiFurmanite Datasheet For FittingozcanÎncă nu există evaluări
- Confined SpacesDocument27 paginiConfined SpacesDivya RastogiÎncă nu există evaluări
- Elements of Soil Mechanics, 8th Edition Examples 5.6 and 5.12Document11 paginiElements of Soil Mechanics, 8th Edition Examples 5.6 and 5.12Mirna KristiyantoÎncă nu există evaluări
- 1221.2 1221.3 en Year 2009Document295 pagini1221.2 1221.3 en Year 2009crismg1100% (1)
- Complete PDFDocument78 paginiComplete PDFBelkhir GuerracheÎncă nu există evaluări
- Basic of ThermodynamicsDocument12 paginiBasic of ThermodynamicsTeeranun NakyaiÎncă nu există evaluări
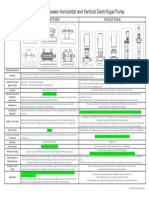
- Comparison Between Horizontal and Vertical PumpDocument1 paginăComparison Between Horizontal and Vertical PumpWilmer GarcíaÎncă nu există evaluări
- Boilers. Test 2: # Choosed Answers Right AnswersDocument5 paginiBoilers. Test 2: # Choosed Answers Right AnswersYanaÎncă nu există evaluări
- BHFQ22P1517 ImDocument14 paginiBHFQ22P1517 ImAlberto Bravo SánchezÎncă nu există evaluări
- TM1478 John Deere 655B, 755B Crawler Loader Repair Technical ManualDocument13 paginiTM1478 John Deere 655B, 755B Crawler Loader Repair Technical ManualtteelsarsÎncă nu există evaluări
- Ultraweld20 40Document2 paginiUltraweld20 40Ziad Al SarrafÎncă nu există evaluări
- Mphil SyllabusDocument15 paginiMphil Syllabusலட்சுமணன் சுÎncă nu există evaluări
- Spare Parts ListDocument20 paginiSpare Parts ListАлександр ДлинныйÎncă nu există evaluări
- Hydraulic Braking System Definition Principle Diagram Components Working Application Advantages WithDocument4 paginiHydraulic Braking System Definition Principle Diagram Components Working Application Advantages WithMONISHA.K 1CK19EC038Încă nu există evaluări
- W 1000064Document24 paginiW 1000064Adrian RodriguesÎncă nu există evaluări
- Simple Harmonic Motion Multiple Choice 2013 07 11 PDFDocument4 paginiSimple Harmonic Motion Multiple Choice 2013 07 11 PDFYuusuf AhmedÎncă nu există evaluări
- Kotači Od Poliamida Velike NosivostiDocument8 paginiKotači Od Poliamida Velike NosivostidinvalÎncă nu există evaluări
- BE Specs VG1000 M9000 TableDocument3 paginiBE Specs VG1000 M9000 TableKumar sssssÎncă nu există evaluări
- Mondelez-Rework U Mixer - Insepction & Repair ReportDocument9 paginiMondelez-Rework U Mixer - Insepction & Repair ReportTaha ZiaÎncă nu există evaluări
- United States Patent (10) Patent No.: US 6,293,107 B1: Kitagawa Et Al. (45) Date of Patent: Sep. 25, 2001Document19 paginiUnited States Patent (10) Patent No.: US 6,293,107 B1: Kitagawa Et Al. (45) Date of Patent: Sep. 25, 2001Burak PalaÎncă nu există evaluări