S-ar putea să vă placă și
- Elementos de concreto reforzado IIDe la EverandElementos de concreto reforzado IIEvaluare: 5 din 5 stele5/5 (1)
- Fundaciones de pilotes: introducción, clasificación y cálculo de capacidad axialDocument249 paginiFundaciones de pilotes: introducción, clasificación y cálculo de capacidad axialAmbar TorrentesÎncă nu există evaluări
- Undrained seismic response of underground structuresDe la EverandUndrained seismic response of underground structuresÎncă nu există evaluări
- UNI CAJAMARCA PILOTESDocument67 paginiUNI CAJAMARCA PILOTESDaniel André Carrion OrtizÎncă nu există evaluări
- Diseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaDe la EverandDiseño Práctico De Cimentaciones Sujetas a Vibración Producida Por MaquinariaÎncă nu există evaluări
- Interacción Pilote TerrenoDocument13 paginiInteracción Pilote TerrenoErick SaavedraÎncă nu există evaluări
- Ejercicios sobre elasticidad y resistencia de materialesDe la EverandEjercicios sobre elasticidad y resistencia de materialesÎncă nu există evaluări
- Diseño Geotécnico de Calzaduras ModificadoDocument17 paginiDiseño Geotécnico de Calzaduras ModificadoLisandro Cliserio Asto MontesÎncă nu există evaluări
- Dinámica de estructuras: Sistemas de un grado de libertadDe la EverandDinámica de estructuras: Sistemas de un grado de libertadEvaluare: 4.5 din 5 stele4.5/5 (4)
- Pilotes en puentesDocument7 paginiPilotes en puenteslbasaldua49Încă nu există evaluări
- Modelo de Una Presentacion de TesisDocument44 paginiModelo de Una Presentacion de TesisLisette Venegas VigourouxÎncă nu există evaluări
- Ensayos para Pilotes HincadossDocument46 paginiEnsayos para Pilotes HincadossPaulina Abelleira FigueroaÎncă nu există evaluări
- Paper Zapatas AisladasDocument0 paginiPaper Zapatas AisladasAbel Carazas CovinosÎncă nu există evaluări
- PilotesDocument12 paginiPilotesRicardoÎncă nu există evaluări
- LicuacionDocument6 paginiLicuacionEdgar SoteloÎncă nu există evaluări
- Zapatas AisladasDocument5 paginiZapatas Aisladasest.arq.uniÎncă nu există evaluări
- Ensayo de Corte Directo y Capacidad Portante 2Document36 paginiEnsayo de Corte Directo y Capacidad Portante 2Diego Orbegozo CampoÎncă nu există evaluări
- Análisis y Diseño de Cimentaciones Profundas Diseño Sísmico de PilotesDocument20 paginiAnálisis y Diseño de Cimentaciones Profundas Diseño Sísmico de PilotesJonathan Francisco Ramirez Rengifo100% (1)
- Cap 12 Metodo de La Fuerza Horizontal EquivalenteDocument32 paginiCap 12 Metodo de La Fuerza Horizontal Equivalenteluciapfm09100% (7)
- Cap 12 Metodo de La Fuerza Horizontal EquivalenteDocument32 paginiCap 12 Metodo de La Fuerza Horizontal EquivalenteLuis Alejandro D TÎncă nu există evaluări
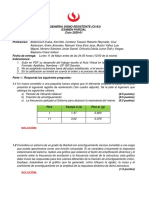
- INGENIERÍA SISMO RESISTENTE EXAMEN PARCIAL 2020Document14 paginiINGENIERÍA SISMO RESISTENTE EXAMEN PARCIAL 2020angelaÎncă nu există evaluări
- Cálculo de pilotes en suelos arcillosos e hidromórficosDocument5 paginiCálculo de pilotes en suelos arcillosos e hidromórficosdilmer collantes quispeÎncă nu există evaluări
- Arqueo de SuelosDocument5 paginiArqueo de SuelosBryan David VallejosÎncă nu există evaluări
- Tarea N°4-Pushover PRM en Concreto ArmadoDocument3 paginiTarea N°4-Pushover PRM en Concreto Armadoerasmo capobiancoÎncă nu există evaluări
- PAPER: Comparison between λ, α, Meyerhof, Vesic, Coyle Castello, SPT, Briaud, O´Neill and Reese 1999 methods in Cast In Situ and Drilled Piles for Clay and Sandy Soils - JAIME NAVÍA TÉLLEZDocument15 paginiPAPER: Comparison between λ, α, Meyerhof, Vesic, Coyle Castello, SPT, Briaud, O´Neill and Reese 1999 methods in Cast In Situ and Drilled Piles for Clay and Sandy Soils - JAIME NAVÍA TÉLLEZJaime Navía TéllezÎncă nu există evaluări
- Estimación RN capacidad carga pilotesDocument32 paginiEstimación RN capacidad carga pilotesLuis Orlando Escarcena YanaÎncă nu există evaluări
- Universidad Nacional de PiuraDocument32 paginiUniversidad Nacional de PiuraDennis MatiasÎncă nu există evaluări
- Examen Parcial 2020 01-2 VFDocument5 paginiExamen Parcial 2020 01-2 VFWenny Rodriguez AcostupaÎncă nu există evaluări
- Fuerzas de Acción Hidrodinámica Del Flujo de Filtración. Fuerza de Empuje Hidrodinámico. Fuerza de Filtración.Document6 paginiFuerzas de Acción Hidrodinámica Del Flujo de Filtración. Fuerza de Empuje Hidrodinámico. Fuerza de Filtración.Arce GuamánÎncă nu există evaluări
- ACTIVIDAD 2 FinalDocument17 paginiACTIVIDAD 2 FinalCristian Yzquierdo QuispeÎncă nu există evaluări
- Segundo Informe Escalonado - Potencial de Licuación de ArenasDocument12 paginiSegundo Informe Escalonado - Potencial de Licuación de Arenasalfri7Încă nu există evaluări
- Fundamentos+de+ingenieria+geotécnica+-+ (Braja+m +das) +PARTE+2Document308 paginiFundamentos+de+ingenieria+geotécnica+-+ (Braja+m +das) +PARTE+2Tarik Limaco Bendezu0% (1)
- Ensayo de Corte de Veleta - HREduardoDocument33 paginiEnsayo de Corte de Veleta - HREduardoEduardo Arturo Hidalgo RamírezÎncă nu există evaluări
- Exposicion de FundacionesDocument2 paginiExposicion de FundacionesDaniel TapiaÎncă nu există evaluări
- Carga en PilotesDocument10 paginiCarga en PilotesCarlos VillaÎncă nu există evaluări
- INGENIERIA SISMO RESISTENTE EXAMEN Parcial 2020 - 01Document6 paginiINGENIERIA SISMO RESISTENTE EXAMEN Parcial 2020 - 01christian ricaldiÎncă nu există evaluări
- Ea IsrDocument16 paginiEa IsrKelly CcahuancamaÎncă nu există evaluări
- Trabajo FinalDocument39 paginiTrabajo FinalEslym YeslinÎncă nu există evaluări
- Ensayos laboratorio suelosDocument13 paginiEnsayos laboratorio suelosDavid VillafuerteÎncă nu există evaluări
- CAP IV-Estabilidad D PilotesDocument55 paginiCAP IV-Estabilidad D PilotesErick SaavedraÎncă nu există evaluări
- Cimentación ZeevaertDocument11 paginiCimentación ZeevaertKevin AlboresÎncă nu există evaluări
- Factores para la estabilidad de pilotes y grupos de pilotesDocument23 paginiFactores para la estabilidad de pilotes y grupos de pilotesGabriel Marchena ChávezÎncă nu există evaluări
- Resistencia A La Fricción LateralDocument8 paginiResistencia A La Fricción LateralDavid BetancourtÎncă nu există evaluări
- Arqueo de SuelosDocument6 paginiArqueo de SuelosBryan David Vallejos50% (2)
- HA Pandeo83Document70 paginiHA Pandeo83Ezequiel CalabreseÎncă nu există evaluări
- Criterio de Cimentaciones Profunda.Document7 paginiCriterio de Cimentaciones Profunda.Andrés Daniel Flores MontañoÎncă nu există evaluări
- Cono Dinámico para Pruebas Superficiales de Penetración in SituDocument8 paginiCono Dinámico para Pruebas Superficiales de Penetración in SituRaúl Zeas CárdenasÎncă nu există evaluări
- Resistencia cortante del suelo: criterio de Mohr-CoulombDocument36 paginiResistencia cortante del suelo: criterio de Mohr-CoulombYisela Milagritos Cubas RegaladoÎncă nu există evaluări
- Modelo simplificado para el análisis dinámico de pilotes sometidos a carga horizontalDocument6 paginiModelo simplificado para el análisis dinámico de pilotes sometidos a carga horizontalJhordan Valdez TapiaÎncă nu există evaluări
- DISEÑO DE LA SUBESTRUCTURA DEL PUENTE COMPUESTODocument23 paginiDISEÑO DE LA SUBESTRUCTURA DEL PUENTE COMPUESTOYulissa Tocto SanchezÎncă nu există evaluări
- Mononobe Okabe - Aashto LRFD 2004Document11 paginiMononobe Okabe - Aashto LRFD 2004Daniel Rojas CisnerosÎncă nu există evaluări
- Diseño de cimentación de pilas: Condiciones subsuperficiales y parámetros geotécnicosDocument72 paginiDiseño de cimentación de pilas: Condiciones subsuperficiales y parámetros geotécnicosOrlandoOmar100% (1)
- Cinemática y problemas de físicaDocument21 paginiCinemática y problemas de físicadarkat02Încă nu există evaluări
- Trabajo de Suelos 2 SPTTDocument13 paginiTrabajo de Suelos 2 SPTTLalo HuaquistoÎncă nu există evaluări
- Capitulo 3. Interaccion Suelo EstructuraDocument18 paginiCapitulo 3. Interaccion Suelo EstructuraabrahamcastellanosÎncă nu există evaluări
- Introduccion A La Dinámica de SuelosDocument38 paginiIntroduccion A La Dinámica de SuelosJorgeIngeniero0% (1)
- Seismic Design PileDocument19 paginiSeismic Design PileAlfredo A LopezÎncă nu există evaluări
- Análisis Estático de La Capacidad de Carga de Un PiloteDocument22 paginiAnálisis Estático de La Capacidad de Carga de Un PiloteAlejandro Poblete PalavecinoÎncă nu există evaluări
- Diseño y tipos de estribos para puentesDocument20 paginiDiseño y tipos de estribos para puentesOswaldo Barrionuevo AbarcaÎncă nu există evaluări
- Ejemplo Re Gresi Ó NDocument25 paginiEjemplo Re Gresi Ó NFernando AlvaradoÎncă nu există evaluări
- Diccionario de GeotecniaDocument295 paginiDiccionario de GeotecniaEnrique RamosÎncă nu există evaluări
- Examen Final DE-II 2020 c1Document1 paginăExamen Final DE-II 2020 c1Fernando AlvaradoÎncă nu există evaluări
- Diseño de Mezclas (SIMPLIFICADO 2005)Document8 paginiDiseño de Mezclas (SIMPLIFICADO 2005)oscarjavier612Încă nu există evaluări
- Examen Final Diseño IIDocument2 paginiExamen Final Diseño IIFernando Alvarado0% (1)
- Informacion Tecnica ASSET DOC LOC 5591124 PDFDocument224 paginiInformacion Tecnica ASSET DOC LOC 5591124 PDFJoaquin Andres Gonzalez CorreaÎncă nu există evaluări
- Examen Final DE-II 2020 c1Document1 paginăExamen Final DE-II 2020 c1Fernando AlvaradoÎncă nu există evaluări
- Pedestal PergolasDocument1 paginăPedestal PergolasFernando AlvaradoÎncă nu există evaluări
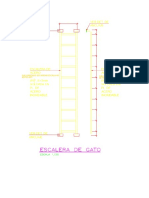
- Detalle de Escalera de GatoDocument2 paginiDetalle de Escalera de GatoFernando AlvaradoÎncă nu există evaluări
- Examen Final Diseño II (Resolución)Document4 paginiExamen Final Diseño II (Resolución)Fernando AlvaradoÎncă nu există evaluări
- Adición Deposito-REP 2014Document23 paginiAdición Deposito-REP 2014Fernando AlvaradoÎncă nu există evaluări
- Ley 51 Caja de Seguro Social PDFDocument102 paginiLey 51 Caja de Seguro Social PDFFernando AlvaradoÎncă nu există evaluări
- Teoria PuentesDocument4 paginiTeoria PuentesFernando AlvaradoÎncă nu există evaluări
- Sistemas de Anclaje PDFDocument15 paginiSistemas de Anclaje PDFFernando AlvaradoÎncă nu există evaluări
- Empalmes de AceroDocument22 paginiEmpalmes de AceroFernando Alvarado100% (1)
- Tabla de Conversion de UnidadesDocument2 paginiTabla de Conversion de UnidadesFernando AlvaradoÎncă nu există evaluări
- Mapa Conceptual Diferentes Tipos de InvestigaciónDocument8 paginiMapa Conceptual Diferentes Tipos de InvestigaciónFernando Alvarado0% (1)
- Teoria PuentesDocument4 paginiTeoria PuentesFernando AlvaradoÎncă nu există evaluări
- Ley 51 Caja de Seguro Social PDFDocument102 paginiLey 51 Caja de Seguro Social PDFFernando AlvaradoÎncă nu există evaluări
- Exploración Del SueloDocument39 paginiExploración Del SueloFernando AlvaradoÎncă nu există evaluări
- Proyecto Final Marco EquivalenteDocument19 paginiProyecto Final Marco EquivalenteFernando AlvaradoÎncă nu există evaluări
- Misión y Visión de Las Universidades en La ActualidadDocument3 paginiMisión y Visión de Las Universidades en La ActualidadFernando AlvaradoÎncă nu există evaluări
- Dragado y Area de DepositoDocument30 paginiDragado y Area de DepositoFernando AlvaradoÎncă nu există evaluări
- Calculo de Resistencia y Estabilidad de Madera Zaptas Taller CIFMDocument2 paginiCalculo de Resistencia y Estabilidad de Madera Zaptas Taller CIFMFernando AlvaradoÎncă nu există evaluări
- Parcial Final de Hormigon AvanzadoDocument13 paginiParcial Final de Hormigon AvanzadoFernando AlvaradoÎncă nu există evaluări
- Trabajo FinalDocument2 paginiTrabajo FinalFernando AlvaradoÎncă nu există evaluări
- Ley 51 Caja de Seguro Social PDFDocument102 paginiLey 51 Caja de Seguro Social PDFFernando AlvaradoÎncă nu există evaluări
- Interaccion Olas - Estructuras Flotantes (Boyas)Document103 paginiInteraccion Olas - Estructuras Flotantes (Boyas)Fernando AlvaradoÎncă nu există evaluări
- Problemas de Redes de Flujo en TaludDocument2 paginiProblemas de Redes de Flujo en TaludFernando AlvaradoÎncă nu există evaluări
- Manual Muros de ContenciónDocument15 paginiManual Muros de ContenciónJose Antonio Dominguez DegraciaÎncă nu există evaluări
- Proyecto BalaDocument4 paginiProyecto BalaAuron ViejoÎncă nu există evaluări
- Laboratorio Virtual de CapacitoresDocument6 paginiLaboratorio Virtual de Capacitorescristhian rojasÎncă nu există evaluări
- Informe Pfs FisicaDocument14 paginiInforme Pfs FisicaDanna GomezÎncă nu există evaluări
- Curso M8 Aerodinámica (Aeromecánica)Document192 paginiCurso M8 Aerodinámica (Aeromecánica)Xavi LoharcesÎncă nu există evaluări
- Reporte Lab Arismendiz Mdi Grupo06 6176Document5 paginiReporte Lab Arismendiz Mdi Grupo06 6176REYNA ESTHER ARISMENDIZ VILLEGASÎncă nu există evaluări
- Ecuaciones DimensionalesDocument2 paginiEcuaciones DimensionalesVictor Antonio Estrada MandujanoÎncă nu există evaluări
- Capitulo 2 Variables de ProcesoDocument6 paginiCapitulo 2 Variables de ProcesoALBERTO0% (1)
- 2º Tema 2 Dinamica de RotacionDocument11 pagini2º Tema 2 Dinamica de Rotacionfefeyati100% (1)
- Relacion de Peso Capacidad y VolumenDocument6 paginiRelacion de Peso Capacidad y VolumenWascar Manuel Poveda PalenqueÎncă nu există evaluări
- U1 - Clase 1-2 - S1Document5 paginiU1 - Clase 1-2 - S1MALDONADO PEZO ERICK JOSUEÎncă nu există evaluări
- Semejanza HidráulicaDocument20 paginiSemejanza HidráulicaKenryuÎncă nu există evaluări
- MRUV Ilbay - LoowilsonDocument10 paginiMRUV Ilbay - LoowilsonMarlon IlbayÎncă nu există evaluări
- Actividad Integradora, Fase 1 IIIDocument5 paginiActividad Integradora, Fase 1 IIIMaxi1000mtzÎncă nu există evaluări
- HuevoDocument7 paginiHuevoCarmen Castro BalagueraÎncă nu există evaluări
- Ings n12 Buchelli ReinosoDocument11 paginiIngs n12 Buchelli Reinosovictor fernandezÎncă nu există evaluări
- Maquina AtwoodDocument5 paginiMaquina AtwoodYuliana PosadaÎncă nu există evaluări
- DinamicaDocument2 paginiDinamicaLupita BellaÎncă nu există evaluări
- Reporte Lab5 Principio de ArquimidesDocument5 paginiReporte Lab5 Principio de ArquimidesJose DavidÎncă nu există evaluări
- 02 Equilibrio de Una Particula MveDocument50 pagini02 Equilibrio de Una Particula MveKEVIN ANGELO PEREZ RIVERAÎncă nu există evaluări
- Fe UniDocument127 paginiFe UniJeyson Bolivar0% (1)
- Rúbrica de Evaluación de Laboratorio 2 Electrícidad (30%)Document12 paginiRúbrica de Evaluación de Laboratorio 2 Electrícidad (30%)sergio ramirez diazÎncă nu există evaluări
- Cuadro Comparativo Entre Partículas Y Cuerpo RígidoDocument2 paginiCuadro Comparativo Entre Partículas Y Cuerpo RígidoCely Mijares0% (1)
- Capitulo 2-Formulas y Calculos BasicpsDocument105 paginiCapitulo 2-Formulas y Calculos BasicpsLeonel Namito FernandoÎncă nu există evaluări
- Ajuste de Minimos Cuadrados PDFDocument3 paginiAjuste de Minimos Cuadrados PDFJUVENALÎncă nu există evaluări
- PLANIFICACION DE CONOCIMIENTOS Y DOMINIOS - 4parcial - ImprimirDocument10 paginiPLANIFICACION DE CONOCIMIENTOS Y DOMINIOS - 4parcial - ImprimirAlexandra FloresÎncă nu există evaluări
- Informe Resistencia y Resistividad de FisicaDocument6 paginiInforme Resistencia y Resistividad de Fisicamaria isabelÎncă nu există evaluări
- Fisica IiDocument4 paginiFisica IiRoger Jh MaqueraÎncă nu există evaluări
- Balanza de JollyDocument15 paginiBalanza de Jollylucho_viva_el_rockÎncă nu există evaluări
- Informe CBRDocument11 paginiInforme CBRnicolasÎncă nu există evaluări