S-ar putea să vă placă și
- RDM ResumeDocument8 paginiRDM ResumeAbdelwahad SaghrouchniÎncă nu există evaluări
- Polycopie Hadjazi Khamis PDFDocument90 paginiPolycopie Hadjazi Khamis PDFDani100% (2)
- BoucheuseDocument1 paginăBoucheuseSou HirrÎncă nu există evaluări
- RDM Devoir 4Document8 paginiRDM Devoir 4Sou HirrÎncă nu există evaluări
- Cours - Modélisation Des Systèmes Mécaniques - Insa ParisDocument162 paginiCours - Modélisation Des Systèmes Mécaniques - Insa ParisAlaa Eddine Radh100% (4)
- ch6 - RDM MDRDocument16 paginich6 - RDM MDRHossam BendaliÎncă nu există evaluări
- RDM Devoir 2Document16 paginiRDM Devoir 2Hsen MacheyÎncă nu există evaluări
- CORRECTION TD3 Exo1Document5 paginiCORRECTION TD3 Exo1Sou HirrÎncă nu există evaluări
- Traveaux Pratiques RDMDocument48 paginiTraveaux Pratiques RDMMehdi BlinkÎncă nu există evaluări
- Fiche Meca gmp1 PDFDocument3 paginiFiche Meca gmp1 PDFCatherine FoucanÎncă nu există evaluări
- Plugin-Poutres ExosDocument3 paginiPlugin-Poutres Exosschene22Încă nu există evaluări
- 1438Document13 pagini1438Ynsip SmixÎncă nu există evaluări
- MecaniqueDocument12 paginiMecaniqueSou Hirr100% (1)
- Physique 4 - KassoulDocument170 paginiPhysique 4 - KassoulAbderrezzaq Ziane100% (1)
- Masses TDocument3 paginiMasses Thakkay100% (1)
- Exercices Geometrie Bac Pro IndustrielDocument11 paginiExercices Geometrie Bac Pro IndustrielSou HirrÎncă nu există evaluări
- Jean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)Document33 paginiJean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)ELFargaliMohamedÎncă nu există evaluări
- Masses TDocument3 paginiMasses Thakkay100% (1)
- TD 10Document49 paginiTD 10Nassro Ziad100% (1)
- Fiche Meca gmp1 PDFDocument3 paginiFiche Meca gmp1 PDFCatherine FoucanÎncă nu există evaluări
- MecaniqueDocument12 paginiMecaniqueSou Hirr100% (1)
- Jean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)Document33 paginiJean-Pierre Gousset - Dessin Technique Et Lecture de Plan. Principes - Exercices. Série Technique Des Dessins Du Bâtiment. (2012, Eyrolles)ELFargaliMohamedÎncă nu există evaluări
- Devoir Cin Matique-Piece-MonnaieDocument1 paginăDevoir Cin Matique-Piece-MonnaieSou HirrÎncă nu există evaluări
- Masses TDocument3 paginiMasses Thakkay100% (1)
- TD 10Document49 paginiTD 10Nassro Ziad100% (1)
- CH 9 Microstuctures TDDocument10 paginiCH 9 Microstuctures TDSou HirrÎncă nu există evaluări
- 05 Trait ThermDocument51 pagini05 Trait ThermRamzi MansouriÎncă nu există evaluări
- Cours RDM 5 SuperpositionDocument5 paginiCours RDM 5 SuperpositionSou Hirr100% (1)
- ITII - Cours de Resistance Des Materiaux Avec Exercices Corriges PDFDocument146 paginiITII - Cours de Resistance Des Materiaux Avec Exercices Corriges PDFMustafa MoussaouiÎncă nu există evaluări
- 1as dc2 Kebili2018 PDFDocument3 pagini1as dc2 Kebili2018 PDFAhmed benabdelkaderÎncă nu există evaluări
- 22proba Ghazdali Cours Chapitre7 LoisContinuesClassiqueDocument64 pagini22proba Ghazdali Cours Chapitre7 LoisContinuesClassiqueHassan BENHAMOUÎncă nu există evaluări
- Fermec Parts CatalogueDocument906 paginiFermec Parts CatalogueJujuÎncă nu există evaluări
- TP Dessiner Avec ScratchDocument1 paginăTP Dessiner Avec ScratchMATHS SCIENCES80% (5)
- La Redondance Des Architectures D'automatisme Accroît La ProductivitéDocument2 paginiLa Redondance Des Architectures D'automatisme Accroît La ProductivitéSoufyan PowerÎncă nu există evaluări
- Partie 3 Du Cours RTOS & Linux Pour Systèmes Embarqués LSE2Document90 paginiPartie 3 Du Cours RTOS & Linux Pour Systèmes Embarqués LSE2Bz AmalÎncă nu există evaluări
- TP de Traitement D Images. Séance 1: Premiers Contacts Avec MatlabDocument8 paginiTP de Traitement D Images. Séance 1: Premiers Contacts Avec MatlabMehdi EL ASRIÎncă nu există evaluări
- Annexe FinalDocument179 paginiAnnexe FinalsoumayaÎncă nu există evaluări
- CIRADjournals,+document 425563Document13 paginiCIRADjournals,+document 425563Casa DinkeÎncă nu există evaluări
- 1 Les Techniques de Multiplexage Et de Modulation AvancéesDocument7 pagini1 Les Techniques de Multiplexage Et de Modulation AvancéesGNOWA BLOÎncă nu există evaluări
- Specification Technique: Dispositifs Normaux de Détection Des Défauts (DDSN) Pour Réseau Souterrain MT 22 KVDocument8 paginiSpecification Technique: Dispositifs Normaux de Détection Des Défauts (DDSN) Pour Réseau Souterrain MT 22 KVing100% (1)
- 2 - Exercice HTML Listes A Puces Listes Numerotees Listes Descriptives Texte Preform AteDocument5 pagini2 - Exercice HTML Listes A Puces Listes Numerotees Listes Descriptives Texte Preform AteHamza_Ahmayach_163Încă nu există evaluări
- TD2 Proba DénombrementDocument3 paginiTD2 Proba Dénombrementyassine lebiouiÎncă nu există evaluări
- 5 - 2.5. Introduction À La Dynamique Des PopulationsDocument19 pagini5 - 2.5. Introduction À La Dynamique Des PopulationsCyrielle ZÎncă nu există evaluări
- 04 Chapitre 2Document19 pagini04 Chapitre 2Walid YahiaouiÎncă nu există evaluări
- Cours ARITHMETIQUE - Manuel FOUCHER PDFDocument22 paginiCours ARITHMETIQUE - Manuel FOUCHER PDFAnthony LaurensÎncă nu există evaluări
- TP2 Stats Desc R PDFDocument9 paginiTP2 Stats Desc R PDFyann chebuÎncă nu există evaluări
- Didactique Items ExemplesDocument16 paginiDidactique Items ExemplesGina GheorghițăÎncă nu există evaluări
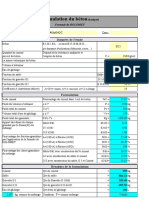
- Etude de Formulation de Béton (Méthode Bolomey)Document2 paginiEtude de Formulation de Béton (Méthode Bolomey)rami ouerghiÎncă nu există evaluări
- Devoir 1 Modele 1 6Document2 paginiDevoir 1 Modele 1 6Soufyan PowerÎncă nu există evaluări
- Espaces EuclidiensDocument13 paginiEspaces Euclidiensmarouane zahiÎncă nu există evaluări
- TD: Réactions Acido-Basiques: Exercice N°1: Diagramme de Distribution Pour Un Couple Monoacide - MonobaseDocument5 paginiTD: Réactions Acido-Basiques: Exercice N°1: Diagramme de Distribution Pour Un Couple Monoacide - Monobaseel hazbi fadilaÎncă nu există evaluări
- Chapitre1 - Transformée de FourierDocument33 paginiChapitre1 - Transformée de FourierHicham Baghdadi0% (1)
- 05-Transmetteur DE40 0-20 - FR Rev-CDocument11 pagini05-Transmetteur DE40 0-20 - FR Rev-CmajÎncă nu există evaluări
- Leçon 2 - Les Adjectifs QualificatifsDocument2 paginiLeçon 2 - Les Adjectifs Qualificatifsstanic jeremyÎncă nu există evaluări
- M3u@tv - Com.vc 7553Document3 paginiM3u@tv - Com.vc 7553Ruivo LindinhaÎncă nu există evaluări
- Arithmétique Et Décomposition en Facteurs Premiers: 1.la Division EuclidienneDocument6 paginiArithmétique Et Décomposition en Facteurs Premiers: 1.la Division EuclidienneHømmę ClassÎncă nu există evaluări
- Barrages Hyroélectriques Par Wean-SimonDocument52 paginiBarrages Hyroélectriques Par Wean-SimonBEMY MABOUHOU Wean-SimonÎncă nu există evaluări
- Travaux DirigesDocument32 paginiTravaux Dirigestarik outalÎncă nu există evaluări
- Distributeur Prepa. Chaudes-ELDocument30 paginiDistributeur Prepa. Chaudes-ELalaaeddine1985Încă nu există evaluări