S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Lege All ChartsDocument16 paginiLege All ChartsJaucafoÎncă nu există evaluări
- NASAHandbook Sec1Document129 paginiNASAHandbook Sec1Pradeep SinglaÎncă nu există evaluări
- Nokia-FastMile-5G User GuideDocument59 paginiNokia-FastMile-5G User GuideHue HueÎncă nu există evaluări
- Contemporary Social ProblemsDocument15 paginiContemporary Social ProblemsRavi TulsianÎncă nu există evaluări
- Name Roll No. Department ProgramDocument24 paginiName Roll No. Department ProgramRavi TulsianÎncă nu există evaluări
- Products Category Pack Size MRP (RS.) : Qnet India Product Price List Effective April 1St 2020Document2 paginiProducts Category Pack Size MRP (RS.) : Qnet India Product Price List Effective April 1St 2020manik mahajanÎncă nu există evaluări
- Ravi 20-09-2016: Drawn Checked QA MFG Approved DWG No TitleDocument1 paginăRavi 20-09-2016: Drawn Checked QA MFG Approved DWG No TitleRavi TulsianÎncă nu există evaluări
- Jishnu Bhattacharya 2 Semester - 2016-17Document8 paginiJishnu Bhattacharya 2 Semester - 2016-17Ravi TulsianÎncă nu există evaluări
- Sol. 1 (B) Matlab Code:: OutputDocument1 paginăSol. 1 (B) Matlab Code:: OutputRavi TulsianÎncă nu există evaluări
- 00041257Document4 pagini00041257Ravi TulsianÎncă nu există evaluări
- Pipeline Leak Detection Technologies Using Sensors and RobotsDocument2 paginiPipeline Leak Detection Technologies Using Sensors and RobotsRavi TulsianÎncă nu există evaluări
- 0354 98361200191D PDFDocument11 pagini0354 98361200191D PDFRavi TulsianÎncă nu există evaluări
- PZT and PVDF Bimorph ActuatorsDocument5 paginiPZT and PVDF Bimorph ActuatorsRavi TulsianÎncă nu există evaluări
- Common Mistakes Report WritingDocument5 paginiCommon Mistakes Report WritingRavi TulsianÎncă nu există evaluări
- Types of Air Compressors PDFDocument4 paginiTypes of Air Compressors PDFRavi Tulsian0% (1)
- CHF Vs Bulk Temperature: Crirtical Heat Flux (In MW/m2)Document1 paginăCHF Vs Bulk Temperature: Crirtical Heat Flux (In MW/m2)Ravi TulsianÎncă nu există evaluări
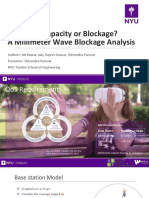
- Driven by Capacity or Blockage? A Millimeter Wave Blockage AnalysisDocument20 paginiDriven by Capacity or Blockage? A Millimeter Wave Blockage Analysissanjayb1976gmailcomÎncă nu există evaluări
- Hiperion PDHDocument4 paginiHiperion PDHrnx17Încă nu există evaluări
- Reference Signal Measurements (RSRP, RSSI, RSRQ) For Cell ReselectionDocument9 paginiReference Signal Measurements (RSRP, RSSI, RSRQ) For Cell Reselectionmehran_4x100% (1)
- Block-Diagram Tour Late Model (5100 Series) EF Johnson 700/800 MHZ 2-Way Radio RF DeckDocument7 paginiBlock-Diagram Tour Late Model (5100 Series) EF Johnson 700/800 MHZ 2-Way Radio RF DeckJimÎncă nu există evaluări
- Chapter 11: Wireless Communication - Bluetooth and ZigbeeDocument24 paginiChapter 11: Wireless Communication - Bluetooth and ZigbeeSomebodyÎncă nu există evaluări
- Optus U900 Layering Strategy V1 0Document31 paginiOptus U900 Layering Strategy V1 0Miko KerenÎncă nu există evaluări
- TL Wn620g PanduanDocument29 paginiTL Wn620g PanduanClams MostÎncă nu există evaluări
- Checking Traps Checking Mosley Antenna Systems..Document2 paginiChecking Traps Checking Mosley Antenna Systems..Ariel BecerraÎncă nu există evaluări
- Uco Reporter Oct2013Document52 paginiUco Reporter Oct2013Ken GraffÎncă nu există evaluări
- 2563-Wireless Catalogue enDocument151 pagini2563-Wireless Catalogue enElafanÎncă nu există evaluări
- Tutorial 2 + SolutionsDocument6 paginiTutorial 2 + SolutionsMujaahid KhanÎncă nu există evaluări
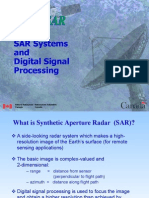
- SAR Signal ProcessingDocument84 paginiSAR Signal ProcessingDoha AbbasÎncă nu există evaluări
- Chapter 5 Amplitude Modulation Reception Tomasi ReviewDocument10 paginiChapter 5 Amplitude Modulation Reception Tomasi ReviewHannah Faith SulongÎncă nu există evaluări
- Flexi MR Bts and Airscale Bts HW Roadmap q3 2018 PDF Free 1 28Document28 paginiFlexi MR Bts and Airscale Bts HW Roadmap q3 2018 PDF Free 1 28TestÎncă nu există evaluări
- 5G NR For FRMCS SPF Matthew Baker 2022 03 29Document14 pagini5G NR For FRMCS SPF Matthew Baker 2022 03 29Bojan SubasicÎncă nu există evaluări
- Ais - Automatic Identification System - What Is Ais?Document22 paginiAis - Automatic Identification System - What Is Ais?Karuna LakhaniÎncă nu există evaluări
- Market Pulsa: Daftar Harga Pulsa RegulerDocument16 paginiMarket Pulsa: Daftar Harga Pulsa RegulerAndhika FahrezaÎncă nu există evaluări
- Automatic DF Antenna Vs R S ADD107Document1 paginăAutomatic DF Antenna Vs R S ADD107Marcos Duván Pineda AlhucemaÎncă nu există evaluări
- RJIL 5G SSCVT Acceptance Report - I-TN-WNDW-ENB-6003 - 1 - 3500Document162 paginiRJIL 5G SSCVT Acceptance Report - I-TN-WNDW-ENB-6003 - 1 - 3500ArulÎncă nu există evaluări
- Digital CW TechniquesDocument39 paginiDigital CW TechniquesSiddharth MishraÎncă nu există evaluări
- Software Defined Radio PDFDocument30 paginiSoftware Defined Radio PDFBertin Polombwe100% (1)
- Communications QBDocument38 paginiCommunications QBDenaiya Watton LeehÎncă nu există evaluări
- Installing A Spider: Spider Compliance and Installation InformationDocument4 paginiInstalling A Spider: Spider Compliance and Installation InformationJacob MillerÎncă nu există evaluări
- Awp 2 MQDocument24 paginiAwp 2 MQrameshdurairajÎncă nu există evaluări
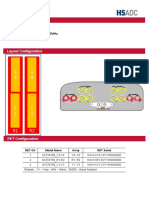
- 6X2T4T65-1516 - HsadcDocument3 pagini6X2T4T65-1516 - HsadcARYANDI APRILIANTOÎncă nu există evaluări
- Fdocuments - in - Seminar Report Electronic Toll Collection SystemDocument22 paginiFdocuments - in - Seminar Report Electronic Toll Collection SystemBhargav NanIEÎncă nu există evaluări
- Earth Station VerificationDocument19 paginiEarth Station VerificationGuillermo MiravallesÎncă nu există evaluări