S-ar putea să vă placă și
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.De la EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Încă nu există evaluări
- Project 1Document9 paginiProject 1openid_FpjZWipRÎncă nu există evaluări
- Project 1Document12 paginiProject 1John SmithÎncă nu există evaluări
- WAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksDe la EverandWAN TECHNOLOGY FRAME-RELAY: An Expert's Handbook of Navigating Frame Relay NetworksÎncă nu există evaluări
- AutomationDocument31 paginiAutomationJerry JosephÎncă nu există evaluări
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingDe la EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingEvaluare: 4 din 5 stele4/5 (1)
- Application Note 1Document7 paginiApplication Note 1hossam_fadeel2560Încă nu există evaluări
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosDe la EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosEvaluare: 5 din 5 stele5/5 (1)
- Lab - Establishing A Console Session With Tera TermDocument5 paginiLab - Establishing A Console Session With Tera TermKevin KimÎncă nu există evaluări
- 2.1.4.7 Lab - Establishing A Console Session With Tera TermDocument11 pagini2.1.4.7 Lab - Establishing A Console Session With Tera Term12niverÎncă nu există evaluări
- Project 2 Computer ScienceDocument9 paginiProject 2 Computer SciencethedonutpirateÎncă nu există evaluări
- Laboratorio DroneDocument7 paginiLaboratorio DroneFernando MontanhaÎncă nu există evaluări
- Lab 0Document8 paginiLab 0huutan86Încă nu există evaluări
- TSR NotesDocument6 paginiTSR NotesTarun KulchandraÎncă nu există evaluări
- Calc ProjectDocument3 paginiCalc Projectsumitg_27Încă nu există evaluări
- MET 382 Lab 1 Fall 09Document6 paginiMET 382 Lab 1 Fall 09Minn HtutÎncă nu există evaluări
- Lab 01 - Introduction To PLC Hardware and SoftwareDocument18 paginiLab 01 - Introduction To PLC Hardware and SoftwareSyed Abdullah Hasan Chishti100% (1)
- PCB Drilling Machine 2Document7 paginiPCB Drilling Machine 2juliusjgunnÎncă nu există evaluări
- Lab 1 - The Basics: ObjectivesDocument7 paginiLab 1 - The Basics: Objectivesjramisch44Încă nu există evaluări
- Laboratorio de Enseñaza 2: TopologyDocument7 paginiLaboratorio de Enseñaza 2: TopologyVICUÑA HUAYLINOS CESAR AUGUSTOÎncă nu există evaluări
- Volume6 2003 PDFDocument31 paginiVolume6 2003 PDFZeljkoSipcicÎncă nu există evaluări
- Villaseñor - MP2 - 100% - October 28, 2022Document27 paginiVillaseñor - MP2 - 100% - October 28, 2022Villaseñor, Christian Cyrille Y.Încă nu există evaluări
- Lab 1 - Part A (2.3.8) - Navigate The IOS by Using Tera Term For Console Connectivity-UpdatedDocument6 paginiLab 1 - Part A (2.3.8) - Navigate The IOS by Using Tera Term For Console Connectivity-Updatedkhalifaalmuhairi20Încă nu există evaluări
- AS-84.3149 Bionics: Project Work Spring 2008Document12 paginiAS-84.3149 Bionics: Project Work Spring 2008veenadivyakishÎncă nu există evaluări
- Scicos Vs SimulinkDocument65 paginiScicos Vs SimulinkaalbieroÎncă nu există evaluări
- Today We Will Cover The First Three Steps On How To Backup Your Allen-Bradley Logix Controller Program To Your PC. The Detailed Steps IncludeDocument13 paginiToday We Will Cover The First Three Steps On How To Backup Your Allen-Bradley Logix Controller Program To Your PC. The Detailed Steps IncludeKrishna JashaÎncă nu există evaluări
- 2.3.8 Lab - Navigate The IOS by Using Tera Term For Console Connectivity - ILMDocument7 pagini2.3.8 Lab - Navigate The IOS by Using Tera Term For Console Connectivity - ILMMichael Isael Altamirano CuevaÎncă nu există evaluări
- Lab1 SpecDocument6 paginiLab1 Spec星期三的配音是對的Încă nu există evaluări
- Connect Kuka Robots With RoboDKDocument6 paginiConnect Kuka Robots With RoboDKRicardo100% (1)
- Wireless Simulation With QualnetDocument16 paginiWireless Simulation With Qualnetkdilip05Încă nu există evaluări
- Telepo SDK Develop Guide Linux For TPS300 v1 0Document10 paginiTelepo SDK Develop Guide Linux For TPS300 v1 0Petit-Homme Ben-JacquesÎncă nu există evaluări
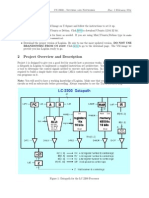
- LC 3b ProjectDocument11 paginiLC 3b ProjectParmanand KhajuriyaÎncă nu există evaluări
- PLC Software: Hand Held ProgrammerDocument11 paginiPLC Software: Hand Held Programmervamsidar47Încă nu există evaluări
- MCRNC Commissioning Guide Document V1 0Document57 paginiMCRNC Commissioning Guide Document V1 0AbdalalhÎncă nu există evaluări
- ECE 315 Computer Interfacing Lab #3: Interfacing Using The Zynq-7000 SPI InterfaceDocument7 paginiECE 315 Computer Interfacing Lab #3: Interfacing Using The Zynq-7000 SPI InterfaceShawn ShadeÎncă nu există evaluări
- Readme PDFDocument12 paginiReadme PDFXavier FelixÎncă nu există evaluări
- Programming PIC Microcontrollers in CDocument126 paginiProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- SLC Examples Application Manual: 3150-MCM Example Ladder LogicDocument24 paginiSLC Examples Application Manual: 3150-MCM Example Ladder LogicVÕ QUỐC HIỆUÎncă nu există evaluări
- Chapter 3Document11 paginiChapter 3nikhilÎncă nu există evaluări
- Lab 2 Networking DevicesDocument13 paginiLab 2 Networking DevicesramanshankarÎncă nu există evaluări
- Idirect User Manual W2ADocument35 paginiIdirect User Manual W2AAlexander LouisÎncă nu există evaluări
- 00 - Final Project - V9-SimonlyDocument8 pagini00 - Final Project - V9-SimonlyAndré SantosÎncă nu există evaluări
- New PLC Lab Manual2 Compressed (1) 1650437778Document66 paginiNew PLC Lab Manual2 Compressed (1) 1650437778sureshgurujiÎncă nu există evaluări
- 2SIT325-21P Network Performance Evaluation-TaskSheetDocument5 pagini2SIT325-21P Network Performance Evaluation-TaskSheetNarendraÎncă nu există evaluări
- MCRNC Commissioning Guide Document-V1.0Document57 paginiMCRNC Commissioning Guide Document-V1.0metootheskull90% (10)
- How To Program The ScopeDocument4 paginiHow To Program The ScopetuxnorÎncă nu există evaluări
- Spectrum Shadow ROMDisassemblyDocument149 paginiSpectrum Shadow ROMDisassemblyMarcos GeorgeÎncă nu există evaluări
- Oaisim WalkthroughDocument7 paginiOaisim Walkthroughselvakumar2k2Încă nu există evaluări
- EasyPLC User Manual PDFDocument100 paginiEasyPLC User Manual PDFJac JacÎncă nu există evaluări
- QL Prog - ManualDocument25 paginiQL Prog - ManualOscar GarnicaÎncă nu există evaluări
- Tutorial On Simatic s5 Control System :practical Programming and Fault FindingDocument22 paginiTutorial On Simatic s5 Control System :practical Programming and Fault Findingak4dili80% (5)
- COGENT Toolbox Manual v125Document51 paginiCOGENT Toolbox Manual v125LlassimoÎncă nu există evaluări
- Using Labview To Design A Payload Control System: Stephen HoranDocument10 paginiUsing Labview To Design A Payload Control System: Stephen HoranPradip GuptaÎncă nu există evaluări
- Ucos + ArmDocument33 paginiUcos + Armசெல்வம் முத்துராமன்Încă nu există evaluări
- PLC-Driver (V5) Schneider Modicon TSX Quantum Momentum Compact - Modbus TCP-IPDocument7 paginiPLC-Driver (V5) Schneider Modicon TSX Quantum Momentum Compact - Modbus TCP-IPAdelmoKarigÎncă nu există evaluări
- Nrf24l01 Tutorial 1 Pic18Document9 paginiNrf24l01 Tutorial 1 Pic18Silvanei Fonseca LeandroÎncă nu există evaluări
- Micro HopeDocument48 paginiMicro Hopeviolator100% (1)
- Lab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteDocument7 paginiLab 3: Basic C Signals and Sockets ICMP/PING, and TracerouteInf EtherealÎncă nu există evaluări
- Software Stage EDocument19 paginiSoftware Stage ETim TaylorÎncă nu există evaluări
- 2200book Full PDFDocument705 pagini2200book Full PDFVignesh Prasad100% (8)
- 2200book Full PDFDocument705 pagini2200book Full PDFVignesh Prasad100% (8)
- Chapter 13Document7 paginiChapter 13Vignesh PrasadÎncă nu există evaluări
- 2200book Full PDFDocument705 pagini2200book Full PDFVignesh Prasad100% (8)
- Answer KeyDocument49 paginiAnswer KeyEnglish Teacher0% (1)
- Active HDL Simulation TutorialDocument6 paginiActive HDL Simulation Tutorialtapas_bayen9388Încă nu există evaluări
- 08 Coombes PostcolonialDocument6 pagini08 Coombes PostcolonialStergios SourlopoulosÎncă nu există evaluări
- Curriculum Approaches in Language Teaching:: Forward, Central, and Backward DesignDocument24 paginiCurriculum Approaches in Language Teaching:: Forward, Central, and Backward DesignJohn Carlo Quiane100% (1)
- Companion To Real Analysis - ErdmanDocument261 paginiCompanion To Real Analysis - ErdmankhoconnoÎncă nu există evaluări
- Lit Analysis 2 - ManilaDocument6 paginiLit Analysis 2 - ManilaPatrick Nuguid100% (1)
- Intro To DBMS Unit 1 AKTUDocument34 paginiIntro To DBMS Unit 1 AKTUSyed Ahmad HusainÎncă nu există evaluări
- A 0214050103Document3 paginiA 0214050103Ximena MorenoÎncă nu există evaluări
- Deductive DatabasesDocument23 paginiDeductive DatabasesMuhammed JishanÎncă nu există evaluări
- Rohit Dvclub 130422125508 Phpapp02Document20 paginiRohit Dvclub 130422125508 Phpapp02Sam HoneyÎncă nu există evaluări
- 6MF28520AA00 Datasheet enDocument3 pagini6MF28520AA00 Datasheet enIvan JeremicÎncă nu există evaluări
- RPM CounterDocument4 paginiRPM CountermailtoakhilsÎncă nu există evaluări
- The Heart of Oracle How The Core Architecture Works Martin Widlake PDFDocument45 paginiThe Heart of Oracle How The Core Architecture Works Martin Widlake PDFronrodriÎncă nu există evaluări
- Critical Thinking and Critical PedagogyDocument28 paginiCritical Thinking and Critical PedagogySohail AkhtarÎncă nu există evaluări
- K80S & K120S Wiring DiagramDocument2 paginiK80S & K120S Wiring DiagramrawsteelÎncă nu există evaluări
- Dewi Noviyanti FitkDocument81 paginiDewi Noviyanti FitkReinaldus Aton 12118023Încă nu există evaluări
- Computer NetworkDocument14 paginiComputer NetworkRoger FreeÎncă nu există evaluări
- Cambridge Vocabulary For IELTS Unit 5Document9 paginiCambridge Vocabulary For IELTS Unit 5Minh Chanh Nguyen100% (2)
- Selection ViewDocument351 paginiSelection ViewjitendrayadavcsÎncă nu există evaluări
- The American Novel in The 21st Century: Changing Contexts, Literary Developments, New Modes of ReadingDocument49 paginiThe American Novel in The 21st Century: Changing Contexts, Literary Developments, New Modes of ReadingАлександра ГеркероваÎncă nu există evaluări
- Assignment Meg 004 (14 15)Document1 paginăAssignment Meg 004 (14 15)bubli234100% (1)
- APJDDVol1No2 ShenDocument36 paginiAPJDDVol1No2 ShenGrace Kong Yun RuiÎncă nu există evaluări
- DLD Lab-11 Sequential Circuit Using SR, D and JK Flip-Flop: Software: Circuit Maker TASK1Document7 paginiDLD Lab-11 Sequential Circuit Using SR, D and JK Flip-Flop: Software: Circuit Maker TASK1Anonymous AnonymousÎncă nu există evaluări
- SF LRN XDom O C S IntegDocument34 paginiSF LRN XDom O C S IntegThuyết Mai VănÎncă nu există evaluări
- IEC 61850 Server Interface: User ManualDocument33 paginiIEC 61850 Server Interface: User ManualThành CôngÎncă nu există evaluări
- Influence of Atmospheric Stability On The Spatial Structure of TurbulenceDocument109 paginiInfluence of Atmospheric Stability On The Spatial Structure of TurbulenceKlaas KronaÎncă nu există evaluări
- Presentation SCADA GroupDocument59 paginiPresentation SCADA GroupUdit Upreti100% (1)
- Body Image and The Media EssaysDocument6 paginiBody Image and The Media EssayskbmbwubafÎncă nu există evaluări
- A Companion To The Study of HistoryDocument369 paginiA Companion To The Study of HistoryNawaz205050% (2)
- "Without Contraries, There Is No Progression": An Analysis On Blake'sDocument6 pagini"Without Contraries, There Is No Progression": An Analysis On Blake'sSara LupónÎncă nu există evaluări
- Computer Science: A Concise IntroductionDe la EverandComputer Science: A Concise IntroductionEvaluare: 4.5 din 5 stele4.5/5 (14)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)De la EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Evaluare: 5 din 5 stele5/5 (1)
- iPhone 15 Pro User Guide for Beginners and SeniorsDe la EverandiPhone 15 Pro User Guide for Beginners and SeniorsÎncă nu există evaluări
- Chip War: The Quest to Dominate the World's Most Critical TechnologyDe la EverandChip War: The Quest to Dominate the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (227)
- Chip War: The Fight for the World's Most Critical TechnologyDe la EverandChip War: The Fight for the World's Most Critical TechnologyEvaluare: 4.5 din 5 stele4.5/5 (82)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsDe la EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsÎncă nu există evaluări
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XDe la EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XEvaluare: 3 din 5 stele3/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersDe la EverandAmazon Web Services (AWS) Interview Questions and AnswersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Windows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertDe la EverandWindows 10 Mastery: The Complete User Guide to Learn Windows 10 from Beginner to ExpertEvaluare: 3.5 din 5 stele3.5/5 (6)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102De la EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Evaluare: 5 din 5 stele5/5 (2)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxDe la EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxÎncă nu există evaluări
- Programming with STM32: Getting Started with the Nucleo Board and C/C++De la EverandProgramming with STM32: Getting Started with the Nucleo Board and C/C++Evaluare: 3.5 din 5 stele3.5/5 (3)
- Essential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XDe la EverandEssential iPhone X iOS 12 Edition: The Illustrated Guide to Using iPhone XEvaluare: 5 din 5 stele5/5 (1)
- How to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideDe la EverandHow to Jailbreak Roku: Unlock Roku, Roku Stick, Roku Ultra, Roku Express, Roku TV with Kodi Step by Step GuideEvaluare: 1 din 5 stele1/5 (1)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002De la EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Evaluare: 5 din 5 stele5/5 (1)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]De la EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Evaluare: 5 din 5 stele5/5 (2)
- Mastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFDe la EverandMastering IoT For Industrial Environments: Unlock the IoT Landscape for Industrial Environments with Industry 4.0, Covering Architecture, Protocols like MQTT, and Advancements with ESP-IDFÎncă nu există evaluări
- Raspberry Pi for Python Programmers Cookbook - Second EditionDe la EverandRaspberry Pi for Python Programmers Cookbook - Second EditionÎncă nu există evaluări
- Raspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesDe la EverandRaspberry Pi Retro Gaming: Build Consoles and Arcade Cabinets to Play Your Favorite Classic GamesÎncă nu există evaluări
- Amazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesDe la EverandAmazon Echo Manual Guide : Top 30 Hacks And Secrets To Master Amazon Echo & Alexa For Beginners: The Blokehead Success SeriesÎncă nu există evaluări
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsDe la EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsEvaluare: 5 din 5 stele5/5 (2)
- Embedded Systems Design with Platform FPGAs: Principles and PracticesDe la EverandEmbedded Systems Design with Platform FPGAs: Principles and PracticesEvaluare: 5 din 5 stele5/5 (1)
- Real-Time UML Workshop for Embedded SystemsDe la EverandReal-Time UML Workshop for Embedded SystemsEvaluare: 3.5 din 5 stele3.5/5 (2)