S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Guitar Tube AmpDocument46 paginiGuitar Tube Ampaptenodyte100% (2)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Calculate Electrical Load for Home Appliances and EquipmentDocument5 paginiCalculate Electrical Load for Home Appliances and EquipmentrodrigopeddrosaÎncă nu există evaluări
- Chapter 6Document30 paginiChapter 6LuqmanMaraabaÎncă nu există evaluări
- Lighting Lumen Calculation (1.7.12)Document12 paginiLighting Lumen Calculation (1.7.12)Jignesh ParmarÎncă nu există evaluări
- L8 Feedback Amp CBY2016Apr5Document35 paginiL8 Feedback Amp CBY2016Apr5LuqmanMaraabaÎncă nu există evaluări
- The Steady State Magnetic FieldDocument28 paginiThe Steady State Magnetic FieldAkula VeerrajuÎncă nu există evaluări
- Posted Notes and Textbook .: Department of Electrical EngineeringDocument1 paginăPosted Notes and Textbook .: Department of Electrical EngineeringLuqmanMaraabaÎncă nu există evaluări
- I/O Ports in AVR: The AVR Microcontroller and Embedded SystemsDocument23 paginiI/O Ports in AVR: The AVR Microcontroller and Embedded SystemsLuqmanMaraabaÎncă nu există evaluări
- Advanced Assembly: The AVR Microcontroller and Embedded SystemsDocument26 paginiAdvanced Assembly: The AVR Microcontroller and Embedded SystemsLuqmanMaraabaÎncă nu există evaluări
- HW4 OpAmp Analysis Summer2017Aug6 PDFDocument1 paginăHW4 OpAmp Analysis Summer2017Aug6 PDFLuqmanMaraabaÎncă nu există evaluări
- 2 Probability and Random VariablesDocument81 pagini2 Probability and Random VariablesAwins OumerÎncă nu există evaluări
- ISA Transactions: Shirong Zhang, Qian Tang, Yu Lin, Yuling TangDocument14 paginiISA Transactions: Shirong Zhang, Qian Tang, Yu Lin, Yuling TangLuqmanMaraabaÎncă nu există evaluări
- ISA Transactions: Luis Amezquita-Brooks, Eduardo Liceaga-Castro, Jesús Liceaga-Castro, Carlos E. Ugalde-LooDocument16 paginiISA Transactions: Luis Amezquita-Brooks, Eduardo Liceaga-Castro, Jesús Liceaga-Castro, Carlos E. Ugalde-LooLuqmanMaraabaÎncă nu există evaluări
- Estimation of Synchronous Machine Parameters by Standstill TestsDocument13 paginiEstimation of Synchronous Machine Parameters by Standstill TestsLuqmanMaraabaÎncă nu există evaluări
- c2 PDFDocument32 paginic2 PDFLuqmanMaraabaÎncă nu există evaluări
- Determination of Permanent-Magnet Synchronous Motors Without Measurements of The Rotor PositionDocument6 paginiDetermination of Permanent-Magnet Synchronous Motors Without Measurements of The Rotor PositionLuqmanMaraabaÎncă nu există evaluări
- CH1 HarmonicsDocument27 paginiCH1 HarmonicsLuqmanMaraabaÎncă nu există evaluări
- Home AssignmentDocument2 paginiHome AssignmentEffecure HealthcareÎncă nu există evaluări
- Iis - Ignition System 4.1: Intelligent Ignition System With Microprozessor Controlled Auto TimingDocument1 paginăIis - Ignition System 4.1: Intelligent Ignition System With Microprozessor Controlled Auto TimingBilal Nuraldin EltayebÎncă nu există evaluări
- BOSCHDocument3 paginiBOSCHU287Încă nu există evaluări
- Battery ChargingDocument5 paginiBattery ChargingJoeban R. Paza0% (1)
- 40W Power Supply For CO Laser Tubes: I. Main FeaturesDocument7 pagini40W Power Supply For CO Laser Tubes: I. Main FeaturesNope SmithÎncă nu există evaluări
- Dry Type Transformers GuideDocument8 paginiDry Type Transformers GuidemaninderpreetÎncă nu există evaluări
- CONSO LampesDocument9 paginiCONSO LampesLes ATESÎncă nu există evaluări
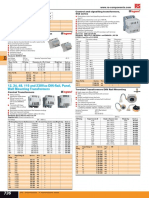
- Transformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersDocument1 paginăTransformers: 12, 24, 48, 115 and 230vac DIN-Rail, Panel, Wall Mounting TransformersЛеха ЯнчукÎncă nu există evaluări
- Design of A 100 VA Power Inverter: January 2020Document10 paginiDesign of A 100 VA Power Inverter: January 2020AKHIL C SUNNYÎncă nu există evaluări
- Instruction Manual AND Technical DocumentationDocument21 paginiInstruction Manual AND Technical DocumentationKhashane Willy MohaleÎncă nu există evaluări
- ♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecDocument108 pagini♤ Spare Part List (베트남) : No. Item Item (1) Item Code Model Name SpecXuân DuyÎncă nu există evaluări
- UCC28600 CalculationDocument61 paginiUCC28600 Calculationconstantingradinaru6693Încă nu există evaluări
- LC1Kpp - Improve Motor Starting Safety with Schneider Electric Overload RelaysDocument1 paginăLC1Kpp - Improve Motor Starting Safety with Schneider Electric Overload RelaysRafael CarmoÎncă nu există evaluări
- SECTION 16170 Disconnect Switches (Motor and Circuit)Document3 paginiSECTION 16170 Disconnect Switches (Motor and Circuit)no nameÎncă nu există evaluări
- Introduction To Logic Gates and Circuit Design: Hernandez, John Patrick A. EE-3104 Intended Learning OutcomesDocument17 paginiIntroduction To Logic Gates and Circuit Design: Hernandez, John Patrick A. EE-3104 Intended Learning OutcomesJohn Patrick HernandezÎncă nu există evaluări
- DS35-08A Datasheet (Hoja de Datos) IXYS Corporation DIODODocument2 paginiDS35-08A Datasheet (Hoja de Datos) IXYS Corporation DIODORonald ReinosaÎncă nu există evaluări
- Hyundai Accent - BCM Connectors - Body Control Module (BCM) - Schematic Diagrams - BCM (Body Control Module) - Body Electrical SystemDocument2 paginiHyundai Accent - BCM Connectors - Body Control Module (BCM) - Schematic Diagrams - BCM (Body Control Module) - Body Electrical SystemRomeo HinogÎncă nu există evaluări
- Masterpact MTZ - Acb - lv833685spDocument2 paginiMasterpact MTZ - Acb - lv833685spGoran MladenovicÎncă nu există evaluări
- CH 3 - Induction MotorsDocument46 paginiCH 3 - Induction MotorsMiz AelyfhaÎncă nu există evaluări
- IR2117 ApplicationDocument24 paginiIR2117 ApplicationBhaskar KharviÎncă nu există evaluări
- ACFrOgAb5QT5bPKn JbEPyaRfa78vIQN-e1sE8t5A3MOkwa6LVR41fG z8-PcMus7pHQLVjDefafkXnWEWWXu7I2taGXCOOg8w JKcSJFoy jK7xgp9JXAKniX6wDocument52 paginiACFrOgAb5QT5bPKn JbEPyaRfa78vIQN-e1sE8t5A3MOkwa6LVR41fG z8-PcMus7pHQLVjDefafkXnWEWWXu7I2taGXCOOg8w JKcSJFoy jK7xgp9JXAKniX6wMario PaucarÎncă nu există evaluări
- Actuator For Modulating Control Ame 435 QM: Data SheetDocument8 paginiActuator For Modulating Control Ame 435 QM: Data SheetFran AlarconÎncă nu există evaluări
- Peee Notes Unit IIIDocument49 paginiPeee Notes Unit IIIPujita JÎncă nu există evaluări
- MV Switchgear Range from Leaders in LV SwitchgearDocument20 paginiMV Switchgear Range from Leaders in LV SwitchgearPrasenjit MaityÎncă nu există evaluări
- Releasing Control Panel: FeaturesDocument2 paginiReleasing Control Panel: FeaturesTanveer AzizÎncă nu există evaluări
- Experiment No. 4 - Impedance of RLC CircuitsDocument2 paginiExperiment No. 4 - Impedance of RLC CircuitsDeanneLaylay100% (1)
- Ac Resonant Test Systems: Feature HeadlineDocument2 paginiAc Resonant Test Systems: Feature HeadlineAlejandro MaturanoÎncă nu există evaluări
- SERIES SC791 SINGLE POLE ROCKER SWITCH GUIDEDocument2 paginiSERIES SC791 SINGLE POLE ROCKER SWITCH GUIDEaakritichÎncă nu există evaluări
- L297/L298 Chopper Drive Printed Circuit Board: Robotic and Microcontrollers ProductsDocument6 paginiL297/L298 Chopper Drive Printed Circuit Board: Robotic and Microcontrollers ProductsmarylizethÎncă nu există evaluări