S-ar putea să vă placă și
- Puesta en marcha de sistemas de automatización industrial. ELEM0311De la EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Evaluare: 3 din 5 stele3/5 (1)
- Reparación de instalaciones automatizadas. ELEE0109De la EverandReparación de instalaciones automatizadas. ELEE0109Încă nu există evaluări
- Tema 3 - Conceptos Básicos Sobre Relevadores de ProtecciónDocument39 paginiTema 3 - Conceptos Básicos Sobre Relevadores de ProtecciónTORRES AGUILAR VICTOR100% (1)
- Primer Parcial 2020 PDFDocument61 paginiPrimer Parcial 2020 PDFMaxter Dragon100% (1)
- Unidad 5 PLCDocument24 paginiUnidad 5 PLCSergio Buenaventura Baez0% (1)
- 2.5 Fuentes de PLCDocument10 pagini2.5 Fuentes de PLCLeidy Lopez LopezÎncă nu există evaluări
- Tableros de Distribución de Fuerza 3.4Document17 paginiTableros de Distribución de Fuerza 3.4Adrian RockefelertÎncă nu există evaluări
- Circuito secuencial: qué es y característicasDocument3 paginiCircuito secuencial: qué es y característicasIsrael SánchezÎncă nu există evaluări
- Clasificación de convertidores DC-DCDocument28 paginiClasificación de convertidores DC-DCFlavio Cesar Martinez HernandezÎncă nu există evaluări
- 2.3 Tipos y Distribucion de Las Memorias InternasDocument14 pagini2.3 Tipos y Distribucion de Las Memorias InternasFredd Alvarez50% (2)
- Arquitectura PLC (Informe Ieee)Document3 paginiArquitectura PLC (Informe Ieee)Miguel Suarez SierraÎncă nu există evaluări
- SubestacionesDocument6 paginiSubestacionesluzÎncă nu există evaluări
- Arranque y Control de Velocidad de Los Motores de Inducción.Document55 paginiArranque y Control de Velocidad de Los Motores de Inducción.Alejandro Cortes DominguezÎncă nu există evaluări
- 2.5 Clasificacion de Los PLCDocument10 pagini2.5 Clasificacion de Los PLCjavier0% (1)
- Practica 4Document11 paginiPractica 4Olaco LaraÎncă nu există evaluări
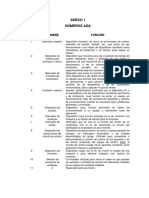
- Anexo Números ASADocument12 paginiAnexo Números ASAJairo Ch L100% (2)
- Ensayo Sobre Logica SecuenciaDocument21 paginiEnsayo Sobre Logica SecuenciaLuis Enrique Huh PucÎncă nu există evaluări
- Reporte de Práctica # 6 - Funcionamiento Del Rele ProgramableDocument15 paginiReporte de Práctica # 6 - Funcionamiento Del Rele ProgramableOscar Manuel Quiroz De La VegaÎncă nu există evaluări
- Definición de ReléDocument3 paginiDefinición de ReléNorlan Torres Rivera100% (2)
- Sanchez Ortega Alan Gaspar Unidad 3 y 4Document45 paginiSanchez Ortega Alan Gaspar Unidad 3 y 4Alan SánchezÎncă nu există evaluări
- Elementos Básicos de Los Sensores - 1Document3 paginiElementos Básicos de Los Sensores - 1careduar2007Încă nu există evaluări
- Unidad 4 PLCDocument16 paginiUnidad 4 PLCJorge DelaurensÎncă nu există evaluări
- PLC Introducción de RedesDocument5 paginiPLC Introducción de RedesAdrian100% (1)
- Generadores de vapor: clasificación, selección y reglamentosDocument23 paginiGeneradores de vapor: clasificación, selección y reglamentosGERADOÎncă nu există evaluări
- Construccion de La Maquina DCDocument10 paginiConstruccion de La Maquina DCPinche HeroHNÎncă nu există evaluări
- Microcontroladores Primer ParcialDocument93 paginiMicrocontroladores Primer ParcialAntonio Díaz de LeonÎncă nu există evaluări
- Exposicion UJTDocument14 paginiExposicion UJTCarlos Luis GuanipaÎncă nu există evaluări
- 04) Circuitos Integrados Lineales (Sesion 4-5) Amplificadores OperacionalesDocument40 pagini04) Circuitos Integrados Lineales (Sesion 4-5) Amplificadores OperacionalesAnonymous LEDlCTÎncă nu există evaluări
- Programación de PLC en lenguaje LadderDocument57 paginiProgramación de PLC en lenguaje LadderJorge DelaurensÎncă nu există evaluări
- Circuito de Disparo Con AislamientoDocument18 paginiCircuito de Disparo Con AislamientoAlejandro Israel AlvaradoÎncă nu există evaluări
- Qué Es Un Transformador Mitigador ArmónicoDocument7 paginiQué Es Un Transformador Mitigador ArmónicoVictor TamayoÎncă nu există evaluări
- Unidad 4 Relé ProgramableDocument6 paginiUnidad 4 Relé ProgramablePaulÎncă nu există evaluări
- 1.2.3 Analisis de Circuitos RLCDocument3 pagini1.2.3 Analisis de Circuitos RLCLuis Mendoza Lopez0% (1)
- 1.4 Tipos de Microcontroladores y Sus FabricantesDocument16 pagini1.4 Tipos de Microcontroladores y Sus FabricantesSergio Clemente Muñoz Grajales100% (1)
- 3.2.2 Parametros de Los Sistemas Subamortiguados Ante La Entrada de EscalonDocument2 pagini3.2.2 Parametros de Los Sistemas Subamortiguados Ante La Entrada de EscalonHugo Cesar Guillermo Lopez GonzalezÎncă nu există evaluări
- Control flujo potencia PSTDocument29 paginiControl flujo potencia PSTFrancisco Arredondo100% (1)
- Ejemplo de Pert CostoDocument7 paginiEjemplo de Pert CostoDiego NogueraÎncă nu există evaluări
- Semaforo MicrowinDocument7 paginiSemaforo MicrowinMiguel ManchenoÎncă nu există evaluări
- Practica 2 - Arranque y Paro de Un Motor Con Dos Sensores de NivelDocument7 paginiPractica 2 - Arranque y Paro de Un Motor Con Dos Sensores de NivelEduardo Alberto Hernandez FriasÎncă nu există evaluări
- Unidad 3 Instalaciones Electricas IndustrialesDocument46 paginiUnidad 3 Instalaciones Electricas IndustrialesJohan GRÎncă nu există evaluări
- Transformadas de Laplace y funciones de transferenciaDocument26 paginiTransformadas de Laplace y funciones de transferenciaM Fernandhoo DMÎncă nu există evaluări
- Manejo Avanzado de DatosDocument64 paginiManejo Avanzado de DatosCarlos Robles CastroÎncă nu există evaluări
- Unidad 3 Subestaciones Electricas PDFDocument22 paginiUnidad 3 Subestaciones Electricas PDFCarlos Uriel Martinez TinocoÎncă nu există evaluări
- 2da Tarea - Cruz Albeto L.NDocument34 pagini2da Tarea - Cruz Albeto L.NMaria Ysabel Lopez SanchezÎncă nu există evaluări
- Plan de Mantenimiento de Una Subestación EléctricaDocument8 paginiPlan de Mantenimiento de Una Subestación EléctricaJhonny Ronald Arpi ArpiÎncă nu există evaluări
- El transistor BJT como conmutadorDocument9 paginiEl transistor BJT como conmutadorcarlosÎncă nu există evaluări
- 5.5 Cálculo y Selección de Componentes Primarios y SecundariosDocument4 pagini5.5 Cálculo y Selección de Componentes Primarios y SecundariosCarlos Guerrero RodríguezÎncă nu există evaluări
- 5.1 Def. y Estructura Basica Del PLCDocument14 pagini5.1 Def. y Estructura Basica Del PLCNestor BatzÎncă nu există evaluări
- Metodologia para Proyecto Con PLCDocument4 paginiMetodologia para Proyecto Con PLCAnonymous 3HbodPZeÎncă nu există evaluări
- Resumen CCPDocument10 paginiResumen CCPDanielSaniÎncă nu există evaluări
- Transposición de Fases o de Líneas de TransmisiónDocument2 paginiTransposición de Fases o de Líneas de TransmisiónAreli Anzaldo BorjasÎncă nu există evaluări
- Estados operativos de un SEP y conceptos de tensión eléctricaDocument10 paginiEstados operativos de un SEP y conceptos de tensión eléctricairving Gar. AÎncă nu există evaluări
- Lab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPDocument11 paginiLab.4 - Control de Temperatura para Horno Utilizando Lenguaje FUPOmar Ruiz Rodríguez100% (2)
- 5.1 Programacion LinealDocument9 pagini5.1 Programacion LinealMaría Millan Trujillo100% (1)
- Ensayo Sobre La Importancia de Un Sistema de Puesta A TierraDocument7 paginiEnsayo Sobre La Importancia de Un Sistema de Puesta A TierraAndrea GuerreroÎncă nu există evaluări
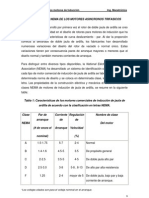
- Clasificacion Nema de Los Motores Asincronos TrifasicosDocument3 paginiClasificacion Nema de Los Motores Asincronos Trifasicosjose_balcazar890% (1)
- Generalidades Sobre Sistemas Eléctricos de PotenciaDocument5 paginiGeneralidades Sobre Sistemas Eléctricos de PotenciaAshirogi MutoÎncă nu există evaluări
- Control de dos focos mediante salidas de relé en PLCDocument4 paginiControl de dos focos mediante salidas de relé en PLCAndrea ChancusigÎncă nu există evaluări
- Controladores Industriales InteligentesDocument22 paginiControladores Industriales InteligentesEzequiel Perez SotoÎncă nu există evaluări
- Informacion - de - Referencia - ISE6 - 1 - 1 HISTORIA PLCDocument21 paginiInformacion - de - Referencia - ISE6 - 1 - 1 HISTORIA PLCmilenaÎncă nu există evaluări
- Introducción a la Vibración en Sistemas MecánicosDocument8 paginiIntroducción a la Vibración en Sistemas MecánicosUriel Galindo MtzÎncă nu există evaluări
- 2 MG1 Manual Básico de Operaciones DINATEKDocument4 pagini2 MG1 Manual Básico de Operaciones DINATEKUriel Galindo MtzÎncă nu există evaluări
- Practica FiltrosDocument5 paginiPractica FiltrosUriel Galindo MtzÎncă nu există evaluări
- Símbolos neumáticos ISO1219Document4 paginiSímbolos neumáticos ISO1219Jaime MoncadaÎncă nu există evaluări
- Tarea Isaura LunesDocument16 paginiTarea Isaura LunesUriel Galindo MtzÎncă nu există evaluări
- Instrumentos de MedicionDocument5 paginiInstrumentos de MedicionUriel Galindo MtzÎncă nu există evaluări
- Actividad 2 Metodo Cientifico QuimicaDocument2 paginiActividad 2 Metodo Cientifico QuimicaCaminante Nocturno Erick SánchezÎncă nu există evaluări
- PivusDocument2 paginiPivusUriel Galindo MtzÎncă nu există evaluări
- Factorización de Los Polinomios en AlgebraDocument13 paginiFactorización de Los Polinomios en Algebraalbert788Încă nu există evaluări
- Clase 01. Introducción A Motores EléctricosDocument9 paginiClase 01. Introducción A Motores EléctricosLuis Antonio Chiapas GarciaÎncă nu există evaluări
- Fracciones Parciales PDFDocument5 paginiFracciones Parciales PDFLuis SegoviaÎncă nu există evaluări
- Oración SimpleDocument3 paginiOración SimpleUriel Galindo MtzÎncă nu există evaluări
- Funcion Exponencial Funcion Exponencial: x+1 X X x+1 x-2Document10 paginiFuncion Exponencial Funcion Exponencial: x+1 X X x+1 x-2Ana Serrano AlonsoÎncă nu există evaluări
- RuffiniDocument3 paginiRuffinilefdadÎncă nu există evaluări
- Rodamientos SKFDocument110 paginiRodamientos SKFAlvaro Cordova BerronesÎncă nu există evaluări
- Cinematica 1 PDFDocument24 paginiCinematica 1 PDFAngelica CarvajalÎncă nu există evaluări
- Imagenes de Tipos de SoldaduraDocument2 paginiImagenes de Tipos de SoldaduraUriel Galindo MtzÎncă nu există evaluări
- Calculo Fuerzas de Viento NSR 98 (Wind Force Calculation)Document11 paginiCalculo Fuerzas de Viento NSR 98 (Wind Force Calculation)German Urdaneta H100% (20)
- Krco U2 A1 HuvmDocument10 paginiKrco U2 A1 HuvmEdward PozosÎncă nu există evaluări
- Architecture English-Spanish DictionaryDocument27 paginiArchitecture English-Spanish DictionaryAnonymous vh1f95o8Încă nu există evaluări
- 2 Examen de InstalacionesDocument16 pagini2 Examen de InstalacionesPeter Huidobro RoldánÎncă nu există evaluări
- NTC Vigentes de Los Materiales de Construccion PDFDocument13 paginiNTC Vigentes de Los Materiales de Construccion PDFAnonymous 3dnlCIVUMÎncă nu există evaluări
- Zimbra Vs XDocument16 paginiZimbra Vs XJonathan Alvarez ColomaÎncă nu există evaluări
- Concreto Premezclado para Pavimento FDocument9 paginiConcreto Premezclado para Pavimento FYaneth Quispe SotoÎncă nu există evaluări
- Las Artes PlásticasDocument3 paginiLas Artes PlásticasHasmin MazariegosÎncă nu există evaluări
- Informe Ejecutivo de Desempeño Laboral, Carlos RieveraDocument42 paginiInforme Ejecutivo de Desempeño Laboral, Carlos RieveraJose GarridoÎncă nu există evaluări
- ChachapoyasDocument28 paginiChachapoyasSantisteban ChiroqueÎncă nu există evaluări
- Informe N 55 Conformidad de Liquidacion de Obra Santa Anitadocx DLDocument10 paginiInforme N 55 Conformidad de Liquidacion de Obra Santa Anitadocx DLLiz Emily Bances PurihuamánÎncă nu există evaluări
- Referentes Centro CulturalDocument28 paginiReferentes Centro CulturalCristianÎncă nu există evaluări
- Diapositivas Deustcher WerkbundDocument11 paginiDiapositivas Deustcher Werkbundraul lopezÎncă nu există evaluări
- Estabilidad de Los Cerramientos de LadrillosDocument37 paginiEstabilidad de Los Cerramientos de LadrillosabocbellsÎncă nu există evaluări
- Arquitectura Cliente - Servidor - proyECTODocument12 paginiArquitectura Cliente - Servidor - proyECTOMonserrat LanderosÎncă nu există evaluări
- Pruebas de Aplicaciones WebDocument5 paginiPruebas de Aplicaciones WebMelissa AlcivarÎncă nu există evaluări
- Definicion de ArquitecturaDocument3 paginiDefinicion de ArquitecturaJhonn OrdoñezÎncă nu există evaluări
- Preparación Del Terreno en La HuertaDocument4 paginiPreparación Del Terreno en La HuertaRuben AlbornozÎncă nu există evaluări
- Parque Nacional La Tigra, hogar de 171 especies de avesDocument6 paginiParque Nacional La Tigra, hogar de 171 especies de avesJoseCarlosHÎncă nu există evaluări
- VOL 1 (Memoria Descriptiva)Document10 paginiVOL 1 (Memoria Descriptiva)Freddy Elvin Fuentes AcuñaÎncă nu există evaluări
- El VolumenDocument6 paginiEl VolumenRonyAnleuÎncă nu există evaluări
- Diseño de Viga PreesforzadaDocument13 paginiDiseño de Viga PreesforzadaRamiro Portillo VargasÎncă nu există evaluări
- Arquitectura HUARMEYDocument29 paginiArquitectura HUARMEYbaldocr7Încă nu există evaluări
- Configuración Access PointDocument34 paginiConfiguración Access PointMg. Miguel A. VENTURA JANAMPAÎncă nu există evaluări
- Sistemas Constructivos de Casas Virreinales en El PeruDocument5 paginiSistemas Constructivos de Casas Virreinales en El PeruBryan UgasÎncă nu există evaluări
- Manual de Introduccion Al CSIBridgeDocument68 paginiManual de Introduccion Al CSIBridgeOrlando VelasquezÎncă nu există evaluări
- CCNA ACLsDocument9 paginiCCNA ACLsSoporte TIÎncă nu există evaluări
- La Escultura y Su ClasificaciónDocument3 paginiLa Escultura y Su ClasificaciónRolyPaquitoÎncă nu există evaluări
- Patrones de Diseño JavaDocument39 paginiPatrones de Diseño JavaJosé Alberto Sánchez González100% (1)
- Guía sobre direccionamiento IPDocument4 paginiGuía sobre direccionamiento IPmiguel angel choconta motavita100% (1)