S-ar putea să vă placă și
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesDe la EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesÎncă nu există evaluări
- Théorie Mecanismes Etude de Cas-MaxpidDocument25 paginiThéorie Mecanismes Etude de Cas-MaxpidMerv Bouda100% (1)
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceDe la EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceÎncă nu există evaluări
- Transmission de Puissance Prof PDFDocument16 paginiTransmission de Puissance Prof PDFRuppy MIYOUNAÎncă nu există evaluări
- TD3 AcvDocument2 paginiTD3 AcvEmma PressonÎncă nu există evaluări
- Programme TerminaleDocument9 paginiProgramme TerminalefatihamÎncă nu există evaluări
- CisaillementDocument4 paginiCisaillementTouil AmirÎncă nu există evaluări
- Cours RessortsDocument29 paginiCours Ressortschaymae amarÎncă nu există evaluări
- 11720120710161753Document9 pagini11720120710161753Youssef Ben KhemisÎncă nu există evaluări
- 6202Document53 pagini6202MohamedAmineDabachiÎncă nu există evaluări
- TP Scie SauteuseDocument5 paginiTP Scie SauteuseremivsnÎncă nu există evaluări
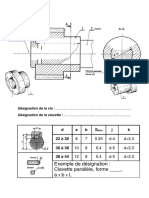
- TD1 Clavette+visDocument1 paginăTD1 Clavette+visFodad NozÎncă nu există evaluări
- BTS CPI U51 2015 Elements de CorrigeDocument10 paginiBTS CPI U51 2015 Elements de CorrigeAbdel Elouaer100% (1)
- TD Serie No 2.1Document2 paginiTD Serie No 2.1omardzstÎncă nu există evaluări
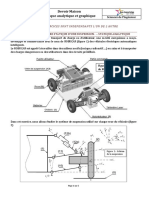
- DM Statique Analytique GraphiqueDocument5 paginiDM Statique Analytique GraphiqueFlav MÎncă nu există evaluări
- TD 1 Chaines de CotesDocument4 paginiTD 1 Chaines de CotesAbdelmajid AittalebÎncă nu există evaluări
- Visserie, Boulonnerieetécrous 1681413364763Document21 paginiVisserie, Boulonnerieetécrous 1681413364763Coumba DialloÎncă nu există evaluări
- Exercice BE2 Ensam MeknesDocument8 paginiExercice BE2 Ensam MeknesThe ShadowÎncă nu există evaluări
- Cahier Dexercices (2019)Document31 paginiCahier Dexercices (2019)lounesÎncă nu există evaluări
- TP 11Document14 paginiTP 11elfahime ELFAHIMEÎncă nu există evaluări
- Calcul Du Couple de Rotation de La NacelleDocument10 paginiCalcul Du Couple de Rotation de La NacelleSaïd Mançouri AzzouziÎncă nu există evaluări
- Treuil HydrauliqueDocument4 paginiTreuil Hydraulique1s1rulliersandÎncă nu există evaluări
- ANNEXEDocument12 paginiANNEXENaoufel FaresÎncă nu există evaluări
- Examen TS 2022Document1 paginăExamen TS 2022yasmin Hassani100% (1)
- Accouplement CoursDocument4 paginiAccouplement CoursElarbi JaffelÎncă nu există evaluări
- 6349 Dossier ReponsesDocument16 pagini6349 Dossier Reponsesdid TouzoÎncă nu există evaluări
- TP Impression 3dDocument9 paginiTP Impression 3dRachedi AbdouÎncă nu există evaluări
- 1 TD Sollicitations - Composees SUJETDocument2 pagini1 TD Sollicitations - Composees SUJETsaraÎncă nu există evaluări
- TDMMC Novembre 2010Document19 paginiTDMMC Novembre 2010Taysir AbidiÎncă nu există evaluări
- Examen 2013 Correction PDFDocument10 paginiExamen 2013 Correction PDFNassim RabaouiÎncă nu există evaluări
- Bielle ManivelleDocument4 paginiBielle ManivelleMohamed EljotariÎncă nu există evaluări
- GM 2Document39 paginiGM 2Youcef MimouniÎncă nu există evaluări
- TD Statique CinématiqueDocument5 paginiTD Statique CinématiqueNour Allah tabibÎncă nu există evaluări
- Chap 2 - Traction - Compression-1Document8 paginiChap 2 - Traction - Compression-1Medeho kodjo Simon henochÎncă nu există evaluări
- TN06 PDFDocument34 paginiTN06 PDFMa HdiÎncă nu există evaluări
- 19 Formalisation Schema CinematiqueDocument2 pagini19 Formalisation Schema CinematiqueYoussef TrimechÎncă nu există evaluări
- 13 - Hydraulique - Schematisation PDFDocument15 pagini13 - Hydraulique - Schematisation PDFSheikh Al-shoteriÎncă nu există evaluări
- Cours - Transmission - de - Mouvements-2 (Recovered 1) PDFDocument14 paginiCours - Transmission - de - Mouvements-2 (Recovered 1) PDFAbdelmajid AittalebÎncă nu există evaluări
- APPLICATIONDocument1 paginăAPPLICATIONmatozo100% (1)
- RDM EleveDocument19 paginiRDM Eleveruben meye meye N'koumeÎncă nu există evaluări
- Chap 2 EngrenagesDocument19 paginiChap 2 EngrenagesMhd Koundio100% (1)
- Presentation Picos18Document22 paginiPresentation Picos18Saf Bes100% (1)
- Examen A05 SolutionDocument7 paginiExamen A05 SolutionAbdallah SbaghdiÎncă nu există evaluări
- DS4 SujetDocument8 paginiDS4 SujetPierre BeckÎncă nu există evaluări
- Examen - Endommagement Par Fatigue 2021Document1 paginăExamen - Endommagement Par Fatigue 2021abdo tmÎncă nu există evaluări
- app6-STE-STM-SMB - Destribution de Tubes - RepDocument10 paginiapp6-STE-STM-SMB - Destribution de Tubes - RepTouriya MoukhlesÎncă nu există evaluări
- AI Bap C Assist Fabric Mécanique 148Document13 paginiAI Bap C Assist Fabric Mécanique 148Donald TeyouÎncă nu există evaluări
- TD Combinatoire TsiDocument5 paginiTD Combinatoire TsikamalÎncă nu există evaluări
- 8 - EngrenageyhkDocument62 pagini8 - EngrenageyhkFédyHamdiÎncă nu există evaluări
- Ci Bac Pro Mei v2Document6 paginiCi Bac Pro Mei v2fatihamÎncă nu există evaluări
- Compléter L'actigramme A0 de La Fonction Globale D'un CompresseurDocument2 paginiCompléter L'actigramme A0 de La Fonction Globale D'un CompresseurNoureddine HermetienÎncă nu există evaluări
- TD 30 - Représentation D'une Fonction Logique PDFDocument4 paginiTD 30 - Représentation D'une Fonction Logique PDFbhs channelÎncă nu există evaluări
- ASM Chap5 Guidage Rotation Calcul Roulements V01 Etudiants.Document33 paginiASM Chap5 Guidage Rotation Calcul Roulements V01 Etudiants.achraf mhimdiÎncă nu există evaluări
- RDM Cable Grue 2020Document3 paginiRDM Cable Grue 2020Ali AmaraÎncă nu există evaluări
- D Synthèse3 2019 1SDocument6 paginiD Synthèse3 2019 1SAdel KmimechÎncă nu există evaluări
- PressemécaniquecnepDocument4 paginiPressemécaniquecnepYousfi WahidÎncă nu există evaluări
- TD Cisaillement ÉnoncéDocument3 paginiTD Cisaillement ÉnoncéJasser OueslatiÎncă nu există evaluări
- Transmission de Puissance Engreages 2 Bac Science DingenieurDocument7 paginiTransmission de Puissance Engreages 2 Bac Science Dingenieursimo2015100% (1)
- Fiche Sur Lecture Dun Dessin Densemble 1 PDFDocument9 paginiFiche Sur Lecture Dun Dessin Densemble 1 PDFSonia SalahÎncă nu există evaluări
- Bts Construction Mecanique Mka 2019 Sujet1Document13 paginiBts Construction Mecanique Mka 2019 Sujet1Bernard Mbotchack100% (1)
- Série - Forces + Équilibre + Poids Et MasseDocument5 paginiSérie - Forces + Équilibre + Poids Et MasseSimoMonkad100% (1)
- Série D'exercices Sur L'ordre Dans RDocument4 paginiSérie D'exercices Sur L'ordre Dans RSimoMonkad100% (1)
- Série 1 - MécaniqueDocument22 paginiSérie 1 - MécaniqueSimoMonkadÎncă nu există evaluări
- SectionsDocument4 paginiSectionsSimoMonkadÎncă nu există evaluări
- Ppt2-Les LentillesDocument26 paginiPpt2-Les LentillesSimoMonkadÎncă nu există evaluări
- CoupesDocument10 paginiCoupesSimoMonkadÎncă nu există evaluări
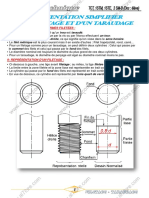
- Filetage Et TaraudageDocument4 paginiFiletage Et TaraudageSimoMonkadÎncă nu există evaluări
- Sources Et Récepteurs de La LumièreDocument2 paginiSources Et Récepteurs de La LumièreSimoMonkadÎncă nu există evaluări
- Correspondance Des VuesDocument1 paginăCorrespondance Des VuesSimoMonkadÎncă nu există evaluări
- Série 7 - Les Lentilles MincesDocument7 paginiSérie 7 - Les Lentilles Mincessarah nabilÎncă nu există evaluări
- Coupes Et Sections 1Document5 paginiCoupes Et Sections 1SimoMonkadÎncă nu există evaluări
- Destion Par La Methode Smed (Document22 paginiDestion Par La Methode Smed (hamcha196967% (3)
- SMEDDocument29 paginiSMEDmeddebyounes100% (1)
- 04-Coupes Et SectionsDocument29 pagini04-Coupes Et Sectionstarik outal100% (1)
- Micro OrganismesDocument10 paginiMicro OrganismesSimoMonkadÎncă nu există evaluări
- Guide Amdec 07-2021Document20 paginiGuide Amdec 07-2021SimoMonkadÎncă nu există evaluări
- Amélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceDocument133 paginiAmélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceSimoMonkad67% (3)
- Amelioration Du Taux de Rendem - ABABOU Youssef - 3499Document80 paginiAmelioration Du Taux de Rendem - ABABOU Youssef - 3499Aziza KarirÎncă nu există evaluări
- 4 Transformation Avril 2019Document7 pagini4 Transformation Avril 2019djidji nanaÎncă nu există evaluări
- Tableau de Bord ExcelDocument35 paginiTableau de Bord ExcelAyoub Abdou100% (1)
- Cours 1 Les Nombres Décimaux RelatifsDocument2 paginiCours 1 Les Nombres Décimaux RelatifsSimoMonkad50% (2)
- Pour Gagner en Flexibilité... ... Le Changement Rapide D'outilsDocument23 paginiPour Gagner en Flexibilité... ... Le Changement Rapide D'outilsnouamane beghitiÎncă nu există evaluări
- Bo Men 01-09-11 190326Document176 paginiBo Men 01-09-11 190326SimoMonkadÎncă nu există evaluări
- Groupe N°17 - Le Changement Rapid D'outilsDocument18 paginiGroupe N°17 - Le Changement Rapid D'outilsOverDocÎncă nu există evaluări
- Guide Amdec 07-2021Document20 paginiGuide Amdec 07-2021SimoMonkadÎncă nu există evaluări
- Amélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceDocument133 paginiAmélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceSimoMonkad67% (3)
- CH 3Document4 paginiCH 3SimoMonkadÎncă nu există evaluări
- Nombres Relatifs 1 2 1Document2 paginiNombres Relatifs 1 2 1SimoMonkadÎncă nu există evaluări
- Amélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceDocument133 paginiAmélioration Du Processus D'injection Plastique Par L'application de La Total Productive MaintenanceSimoMonkad67% (3)
- Guide PARSII Maths 1e 2e Et 3e Ann - Du CollDocument96 paginiGuide PARSII Maths 1e 2e Et 3e Ann - Du CollSimoMonkadÎncă nu există evaluări
- Les Voiles Dans Le BâtimentDocument55 paginiLes Voiles Dans Le BâtimentOkba Zehani90% (10)
- AlgorithmeDocument8 paginiAlgorithmeAbderrahmane OufaqirÎncă nu există evaluări
- 8) 30-10-2023-Réunion Sur L'ami de La Step de TamellaletDocument1 pagină8) 30-10-2023-Réunion Sur L'ami de La Step de TamellaletfdreÎncă nu există evaluări
- Rapport 2émeDocument28 paginiRapport 2émeAdam Ben HamoudaÎncă nu există evaluări
- Airline ManagerDocument7 paginiAirline ManagerassoÎncă nu există evaluări
- C5autovolt PDFDocument61 paginiC5autovolt PDFilja5nill100% (2)
- QCMDocument29 paginiQCMgikkou100% (2)
- 95 Resume Meca 2019Document6 pagini95 Resume Meca 2019Hicham ZghariÎncă nu există evaluări
- Cercle C.R.E.D.O - Guide Du Câblage OptiqueDocument53 paginiCercle C.R.E.D.O - Guide Du Câblage OptiqueNyankoye Apollinaire LouaÎncă nu există evaluări
- 199 Modele CV LuxembourgDocument2 pagini199 Modele CV Luxembourgadegbegilles68Încă nu există evaluări
- Le Québec CyclableDocument292 paginiLe Québec CyclableDamselaÎncă nu există evaluări
- Souss-Massa Examen Regional PC 2021 Sujet PDFDocument4 paginiSouss-Massa Examen Regional PC 2021 Sujet PDFAhmed Taha RazinÎncă nu există evaluări
- Uv VisDocument36 paginiUv Visanon_224403045Încă nu există evaluări
- Les Joints de ChausséeDocument22 paginiLes Joints de Chausséeyoussouf ahmedbabaÎncă nu există evaluări
- 05 Usinage & MEMSDocument57 pagini05 Usinage & MEMSInes Ben TibaÎncă nu există evaluări
- Rapport-De-Stage-2023 AyaDocument104 paginiRapport-De-Stage-2023 AyaimenÎncă nu există evaluări
- Accura AntigoDocument46 paginiAccura AntigoLuciandro CunhaÎncă nu există evaluări
- Cern Dir en 86 2Document196 paginiCern Dir en 86 2Lahoucine GourdoÎncă nu există evaluări
- Exercices Dexamens Precedents - Licence s5 TelecommunicationsDocument24 paginiExercices Dexamens Precedents - Licence s5 TelecommunicationsImma StylesÎncă nu există evaluări
- Evolution 2G 3G PDFDocument94 paginiEvolution 2G 3G PDFAbderrahmen Abderrahmen100% (1)
- TD 3 Thermodynamique ChimiqueDocument3 paginiTD 3 Thermodynamique Chimiquebabdelmalek202Încă nu există evaluări
- Feurst - Fastkey-2018Document7 paginiFeurst - Fastkey-2018ApexiÎncă nu există evaluări
- Placo 3Document1 paginăPlaco 3dersvinceÎncă nu există evaluări
- CLIMATISEURDocument27 paginiCLIMATISEURatek haceneÎncă nu există evaluări
- Atelier MEF QuestionsDocument10 paginiAtelier MEF QuestionsLau MilÎncă nu există evaluări
- Cour Eln Diode322Document28 paginiCour Eln Diode322Joujou JuÎncă nu există evaluări
- Livrable 3Document11 paginiLivrable 3JossÎncă nu există evaluări
- Arrêté Aménagement-Exploitation Dépôts (1968)Document6 paginiArrêté Aménagement-Exploitation Dépôts (1968)Anonh AdikoÎncă nu există evaluări
- Interconnexion Sites Distants DMVPNDocument16 paginiInterconnexion Sites Distants DMVPNMalal NdiayeÎncă nu există evaluări
- Fiche J Controle Du Serrage Boulon HR Cetim Maurin Fixation Fix - Tec - P Lmod10Document4 paginiFiche J Controle Du Serrage Boulon HR Cetim Maurin Fixation Fix - Tec - P Lmod10naÎncă nu există evaluări