S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Carcassonne Complete Annotated RulesDocument179 paginiCarcassonne Complete Annotated RulesazazeÎncă nu există evaluări
- An Introduction To BRDF-Based LightingDocument15 paginiAn Introduction To BRDF-Based LightingazazeÎncă nu există evaluări
- An Introduction To BRDF-Based LightingDocument15 paginiAn Introduction To BRDF-Based LightingazazeÎncă nu există evaluări
- High Dimensional Rendering in OpenGLDocument13 paginiHigh Dimensional Rendering in OpenGLazazeÎncă nu există evaluări
- Os DevDocument77 paginiOs DevVignesh SoundararajanÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
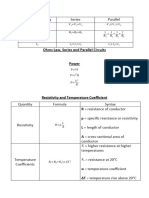
- EET - Formulas - Christmas TermDocument3 paginiEET - Formulas - Christmas TermJMDÎncă nu există evaluări
- FENA-01 - 11 - 21 - Ethernet Adapter - User's Manual - Rev BDocument388 paginiFENA-01 - 11 - 21 - Ethernet Adapter - User's Manual - Rev BQUOC LEÎncă nu există evaluări
- Ge Druck PTX 7535Document2 paginiGe Druck PTX 7535ICSSÎncă nu există evaluări
- Wjec Biology SpectificaionDocument93 paginiWjec Biology SpectificaionLucy EvrettÎncă nu există evaluări
- Deld12070 CC18 GT 371 C CDocument1 paginăDeld12070 CC18 GT 371 C CDEBASIS BARMANÎncă nu există evaluări
- Adminstration of Intramusclar InjectionDocument3 paginiAdminstration of Intramusclar InjectionDenise CastroÎncă nu există evaluări
- Diablo Watch Newsletter, FALL 2009 Save Mount DiabloDocument16 paginiDiablo Watch Newsletter, FALL 2009 Save Mount DiabloIoannqisHatzopoulosÎncă nu există evaluări
- Yamaha r6 Yec Kit ManualDocument2 paginiYamaha r6 Yec Kit ManualAlexander0% (1)
- Augocom Micro 768 Battery Tester User ManualDocument29 paginiAugocom Micro 768 Battery Tester User ManualJorge PontonÎncă nu există evaluări
- Penawaran Pekerjaan Fire Fighting (Upah + Material)Document3 paginiPenawaran Pekerjaan Fire Fighting (Upah + Material)vixer ndi100% (6)
- Rubber Lined Piping - A Solution To Corrosion ResistanceDocument5 paginiRubber Lined Piping - A Solution To Corrosion ResistanceMohamed AghilaÎncă nu există evaluări
- Company Profile: Only Milling Since 1967Document16 paginiCompany Profile: Only Milling Since 1967PavelÎncă nu există evaluări
- Model: P660 Series: Differential Pressure Gauge With Diaphragm ElementDocument6 paginiModel: P660 Series: Differential Pressure Gauge With Diaphragm ElementTÀi VÕÎncă nu există evaluări
- Fantasy AGE - Spell SheetDocument2 paginiFantasy AGE - Spell SheetpacalypseÎncă nu există evaluări
- English 8 - B TR Và Nâng CaoDocument150 paginiEnglish 8 - B TR Và Nâng CaohhÎncă nu există evaluări
- DIY Paper Sculpture: The PrincipleDocument20 paginiDIY Paper Sculpture: The PrincipleEditorial MosheraÎncă nu există evaluări
- Gcat Threathorizons Full Jan2023Document26 paginiGcat Threathorizons Full Jan2023josbjsÎncă nu există evaluări
- Collage Lab PDFDocument145 paginiCollage Lab PDFmaa siddhi92% (12)
- Coca ColaDocument50 paginiCoca Colamariyha PalangganaÎncă nu există evaluări
- Avionic ArchitectureDocument127 paginiAvionic ArchitectureRohithsai PasupuletiÎncă nu există evaluări
- Sermo 13 de Tempore (2 Feb in Praes)Document1 paginăSermo 13 de Tempore (2 Feb in Praes)GeorgesEdouardÎncă nu există evaluări
- Assignment On Cholera: Submitted ToDocument17 paginiAssignment On Cholera: Submitted ToEhesanulHaqueSaifÎncă nu există evaluări
- 132kV Substation Feasibility StudyDocument16 pagini132kV Substation Feasibility StudyTafadzwa MurwiraÎncă nu există evaluări
- XC24M MG DatasheetDocument3 paginiXC24M MG DatasheetAbdulJawad Ibrahim ElmezoghiÎncă nu există evaluări
- Chinese ArchitectureDocument31 paginiChinese Architecturenusantara knowledge100% (2)
- Stress Management PPT FinalDocument7 paginiStress Management PPT FinalAdarsh Meher100% (1)
- Lec 8-10Document5 paginiLec 8-10osamamahmood333Încă nu există evaluări
- InTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesDocument20 paginiInTech-Batteries Charging Systems For Electric and Plug in Hybrid Electric VehiclesM VetriselviÎncă nu există evaluări
- Manual Generador CAT C15 IbaguéDocument6 paginiManual Generador CAT C15 IbaguéAndres VargasÎncă nu există evaluări
- Microsoft Word - IRN Fab Transfer PCN NoticeDocument22 paginiMicrosoft Word - IRN Fab Transfer PCN NoticeJadilson PradoÎncă nu există evaluări