S-ar putea să vă placă și
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Haikal Sitepu 2020 IOP Conf. Ser. Mater. Sci. Eng. 801 012116Document9 paginiHaikal Sitepu 2020 IOP Conf. Ser. Mater. Sci. Eng. 801 012116Yogesh DewangÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- $octave - QF - No-Window-System Main.m: Executing The Program...Document2 pagini$octave - QF - No-Window-System Main.m: Executing The Program...Yogesh DewangÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5795)
- 4R of Rubber Waste Management: Current and OutlookDocument15 pagini4R of Rubber Waste Management: Current and OutlookYogesh DewangÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- 376 Maria ParaschivvDocument11 pagini376 Maria ParaschivvYogesh DewangÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- 2018-Global-Cumulative Incremental Hole-Flanging by ToolsDocument8 pagini2018-Global-Cumulative Incremental Hole-Flanging by ToolsYogesh DewangÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Research On Remaining Life Evaluation Method of T92 Steel For Superheater Tube Based On Oxide Layer GrowthDocument7 paginiResearch On Remaining Life Evaluation Method of T92 Steel For Superheater Tube Based On Oxide Layer GrowthYogesh DewangÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Numerical Investigation of Combustion Optimization in A Tangential Firing Boiler Considering Steam Tube OverheatingDocument15 paginiNumerical Investigation of Combustion Optimization in A Tangential Firing Boiler Considering Steam Tube OverheatingYogesh DewangÎncă nu există evaluări
- 70 InvestigationonThermal PerformanceDocument6 pagini70 InvestigationonThermal PerformanceYogesh DewangÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Success Story For Future-Kia Motors in IndiaDocument3 paginiSuccess Story For Future-Kia Motors in IndiaYogesh Dewang0% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Manufacturing Technology ME-405: Unit - I BroachingDocument17 paginiManufacturing Technology ME-405: Unit - I BroachingYogesh DewangÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Literature Review Paper of Wind Turbine BladeDocument36 paginiLiterature Review Paper of Wind Turbine BladeYogesh DewangÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- A Study of Metal Extrusion ProcessDocument7 paginiA Study of Metal Extrusion ProcessYogesh DewangÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Gears & Gear Manufacturing Processes-2Document58 paginiGears & Gear Manufacturing Processes-2Yogesh DewangÎncă nu există evaluări
- Introduction To Openfoam: Roberto Pieri - Scs ItalyDocument8 paginiIntroduction To Openfoam: Roberto Pieri - Scs ItalyYogesh DewangÎncă nu există evaluări
- Effect of Process Parameters On Deformation Behavior of AA 5052 Sheets in Stretch Flanging Process PDFDocument11 paginiEffect of Process Parameters On Deformation Behavior of AA 5052 Sheets in Stretch Flanging Process PDFYogesh DewangÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Understanding of Dynamic Voltage: Restorers Through MATLAB SimulationDocument6 paginiUnderstanding of Dynamic Voltage: Restorers Through MATLAB SimulationPhạm Quý ThắngÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Modul Perefect Score Matematik Tambahan Melaka 2014Document65 paginiModul Perefect Score Matematik Tambahan Melaka 2014Muhammad Hazwan RahmanÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Assignment 01Document1 paginăAssignment 01Manoj BalakrishnaÎncă nu există evaluări
- IPSF Code of Points 2017-18 Final EnglishDocument135 paginiIPSF Code of Points 2017-18 Final EnglishIsabela BiazottoÎncă nu există evaluări
- RD2.0E To RD200E: Zener DiodesDocument12 paginiRD2.0E To RD200E: Zener DiodesДрагиша Небитни ТрифуновићÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- THERMOREGULATIONDocument8 paginiTHERMOREGULATIONDewiSartikaÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1091)
- 4th Maths Term-2 Question Paper EMDocument4 pagini4th Maths Term-2 Question Paper EMSanthoshÎncă nu există evaluări
- Hilbert Transform - Wikipedia, The Free EncyclopediaDocument9 paginiHilbert Transform - Wikipedia, The Free EncyclopediasunilnkkumarÎncă nu există evaluări
- Me685 Midterm SolutionsDocument3 paginiMe685 Midterm SolutionsTrushal KargiÎncă nu există evaluări
- S-18 20Document2 paginiS-18 20Raghavendra MurthyÎncă nu există evaluări
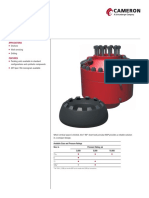
- Short-Body Annular BOP: ApplicationsDocument2 paginiShort-Body Annular BOP: ApplicationsMEHDIÎncă nu există evaluări
- Reaction MechanismDocument5 paginiReaction MechanismKatniss Tathagata100% (1)
- Ae 2301 - Flight Dynamics V Sem Question Bank Part ADocument3 paginiAe 2301 - Flight Dynamics V Sem Question Bank Part ASaravanan AtthiappanÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Resume 10-16-2017Document2 paginiResume 10-16-2017api-336793554Încă nu există evaluări
- Conductivity TesterDocument4 paginiConductivity TesterFelix PintoÎncă nu există evaluări
- TollsyllDocument84 paginiTollsyllHemaraju RajuÎncă nu există evaluări
- ZL - 209Document2 paginiZL - 209Fraz AhmadÎncă nu există evaluări
- Capacitance and Potential 2014Document25 paginiCapacitance and Potential 2014Romil GargÎncă nu există evaluări
- Deber MCUDocument1 paginăDeber MCUhistoria2594Încă nu există evaluări
- Steel Castings HandbookDocument58 paginiSteel Castings Handbookgalici2002100% (3)
- RMT RFT Calculator & Calculated SheetsDocument3 paginiRMT RFT Calculator & Calculated SheetsAnimesh_Singh10% (1)
- di V iR R L L Mi dt = + + + + ω T Mi =: a a a a se a se a mDocument33 paginidi V iR R L L Mi dt = + + + + ω T Mi =: a a a a se a se a mMedo SabahÎncă nu există evaluări
- Combustion Process SimulationDocument6 paginiCombustion Process SimulationKingsley Etornam AnkuÎncă nu există evaluări
- Forces & Motion, IGCSEDocument4 paginiForces & Motion, IGCSEsapiniÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Improvement of Bus-Invert EncodingDocument4 paginiImprovement of Bus-Invert EncodingAlamgir MohammedÎncă nu există evaluări
- A Source Book in APLDocument146 paginiA Source Book in APLhungbkpro90100% (1)
- HW 7Document2 paginiHW 7alma kobicÎncă nu există evaluări
- Monofocal and Progrssive LensDocument2 paginiMonofocal and Progrssive LensPablo Ramirez CruzÎncă nu există evaluări
- Gravitational Field and Gravitational Field StrengthDocument2 paginiGravitational Field and Gravitational Field StrengthSanÎncă nu există evaluări
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresDe la EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresEvaluare: 1 din 5 stele1/5 (2)