S-ar putea să vă placă și
- Basic Electronics by BakshiDocument226 paginiBasic Electronics by Bakshiniju86% (7)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDe la EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsÎncă nu există evaluări
- Finding Extrasolar Planets V4Document4 paginiFinding Extrasolar Planets V4orfanakÎncă nu există evaluări
- Calculation of Asphalt Concrete PropertiesDocument8 paginiCalculation of Asphalt Concrete PropertiesEdwin Leon50% (2)
- Calculate The Relieving Temperature & Latent Heat of Vaporization For Fire Case PSV Sizing by Shell DEP MethodDocument3 paginiCalculate The Relieving Temperature & Latent Heat of Vaporization For Fire Case PSV Sizing by Shell DEP Methodrohitkush80% (5)
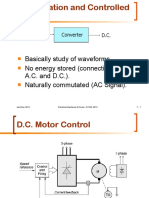
- Topic 7 DCMotorControl Part2Document29 paginiTopic 7 DCMotorControl Part2Marlon BoucaudÎncă nu există evaluări
- Aula6 - ConversoresDocument26 paginiAula6 - ConversoreslucianoÎncă nu există evaluări
- AREVA - Fault AnalysisDocument106 paginiAREVA - Fault AnalysisAboMohamedBassam100% (1)
- 2.-Electrotecnia Unit2 PDFDocument12 pagini2.-Electrotecnia Unit2 PDFJayaraj LathaÎncă nu există evaluări
- PM20CSJ060Document6 paginiPM20CSJ060Dany Carrasco Ysus TecladosÎncă nu există evaluări
- 12-Presentation CTs & VTsDocument57 pagini12-Presentation CTs & VTsmithun46Încă nu există evaluări
- D Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various ProtectionsDocument6 paginiD Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various Protectionsঅর্ণব কোলেÎncă nu există evaluări
- AM5898NDocument11 paginiAM5898NGabriel Cosme VazquezÎncă nu există evaluări
- Flyback DC DC ConverterDocument10 paginiFlyback DC DC ConverterAswardi MawardiÎncă nu există evaluări
- VSDWorkshop 1001Document23 paginiVSDWorkshop 1001Thanh NguyenÎncă nu există evaluări
- Transformer Driver For Isolated Power Supplies: Features ApplicationsDocument29 paginiTransformer Driver For Isolated Power Supplies: Features Applicationsngongpro27Încă nu există evaluări
- EN 206: Power Electronics and Machines: InvertersDocument40 paginiEN 206: Power Electronics and Machines: Invertersakoca23Încă nu există evaluări
- U217BDocument11 paginiU217BAnonymous JR1LSmN0sÎncă nu există evaluări
- Re 29929Document4 paginiRe 29929Ahmed Abd ElhakeemÎncă nu există evaluări
- Aplikasi Op Amp: Pertemuan Ke 10 Kuliah Elektronika Dasar Prodi Teknik Elektro Jteti-Ugm Mei 2010Document21 paginiAplikasi Op Amp: Pertemuan Ke 10 Kuliah Elektronika Dasar Prodi Teknik Elektro Jteti-Ugm Mei 2010Adri Muhaimin AfifÎncă nu există evaluări
- Class Test - 2016: Power ElectronicsDocument9 paginiClass Test - 2016: Power ElectronicsarunÎncă nu există evaluări
- ALSTOM Symbols and Signs On Electr Diagrams IEC - ANSIDocument5 paginiALSTOM Symbols and Signs On Electr Diagrams IEC - ANSIHeather CarterÎncă nu există evaluări
- Topic 6 DCMotorControlDocument31 paginiTopic 6 DCMotorControlMarlon BoucaudÎncă nu există evaluări
- MV Network Design Answer Book en Schneider Electric Date 2112009Document37 paginiMV Network Design Answer Book en Schneider Electric Date 2112009Anonymous kdFzbQ4jfÎncă nu există evaluări
- InverterDocument26 paginiInverterGs SuÎncă nu există evaluări
- Low Power Energy Harvester IC From Linear Technologies - LTC3108Document22 paginiLow Power Energy Harvester IC From Linear Technologies - LTC3108shawnleegabrielÎncă nu există evaluări
- LM331 VFCDocument15 paginiLM331 VFCfmsanturioÎncă nu există evaluări
- Voltage Drop Calculation DraftDocument9 paginiVoltage Drop Calculation Draftmeeng2014Încă nu există evaluări
- Class-A Source Follower With External Resistor Output StageDocument23 paginiClass-A Source Follower With External Resistor Output StagelaksologinÎncă nu există evaluări
- Application Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Document16 paginiApplication Note AN-4150: Design Guidelines For Flyback Converters Using FSQ-series Fairchild Power Switch (FPS™)Nagendra ChaitanyaÎncă nu există evaluări
- lm2907 NDocument32 paginilm2907 NCAFECHINOÎncă nu există evaluări
- Irams10Up60A: Pd-94640 RevhDocument17 paginiIrams10Up60A: Pd-94640 RevhCleiton Da Gama GarciaÎncă nu există evaluări
- Fy4aej 03Document9 paginiFy4aej 03tabassam7801Încă nu există evaluări
- XR 2206 V 1Document16 paginiXR 2206 V 1Leon F AceroÎncă nu există evaluări
- Speed Control of DC Motor Using PDocument22 paginiSpeed Control of DC Motor Using PAnanth Sai YadavÎncă nu există evaluări
- Irams 06 Up 60 ADocument18 paginiIrams 06 Up 60 AAndré Roberto EvangelistaÎncă nu există evaluări
- IRAMX16UP60ADocument18 paginiIRAMX16UP60Atheylor1990Încă nu există evaluări
- Delta Vfd007l21aDocument2 paginiDelta Vfd007l21aCongora PabloÎncă nu există evaluări
- Ecee Colorado Edu Copec Book Slides Ch1slide PDFDocument35 paginiEcee Colorado Edu Copec Book Slides Ch1slide PDFVikram BorawakeÎncă nu există evaluări
- Lecture 050 - Followers: (READING: GHLM - 344-362, AH - 221-226) ObjectiveDocument7 paginiLecture 050 - Followers: (READING: GHLM - 344-362, AH - 221-226) ObjectiveArchana RkÎncă nu există evaluări
- UCC35702Document24 paginiUCC35702Malay K GhoshÎncă nu există evaluări
- Cmos InverterDocument92 paginiCmos Invertersreekanthreddy peramÎncă nu există evaluări
- Max038 Generador de FuncionesDocument17 paginiMax038 Generador de FuncionesLuis Rodolfo Reyes JimenezÎncă nu există evaluări
- SM - MinarcMig 150 - V1Document23 paginiSM - MinarcMig 150 - V1Koguttoo100% (1)
- Ras Gkve2 Revisedfeb07 SVM 06036 2Document54 paginiRas Gkve2 Revisedfeb07 SVM 06036 2karunvandnaÎncă nu există evaluări
- Datasheet T2117Document16 paginiDatasheet T2117Radovan RasaÎncă nu există evaluări
- lm331 PDFDocument21 paginilm331 PDFOsvaldo Dominguez GonzalezÎncă nu există evaluări
- AFT05MP075NDocument21 paginiAFT05MP075NjeremyAW2SÎncă nu există evaluări
- Unisonic Technologies Co., LTD: Multiple Rs-232 Drivers and ReceiversDocument10 paginiUnisonic Technologies Co., LTD: Multiple Rs-232 Drivers and ReceiversAbdul MajidÎncă nu există evaluări
- Machine Training PM Synchronous Ansoft MaxwellDocument111 paginiMachine Training PM Synchronous Ansoft Maxwellmashinbaz1100% (3)
- MFVU Alstom PDFDocument8 paginiMFVU Alstom PDFkggganiÎncă nu există evaluări
- Data SheetDocument6 paginiData SheetBojan MarkovicÎncă nu există evaluări
- W3N150Document15 paginiW3N150Mohammad AhmedÎncă nu există evaluări
- Overlap 2Document22 paginiOverlap 2Anonymous fFl3xgWÎncă nu există evaluări
- PM20CSJ060: Mitsubishi Intelligent Power ModulesDocument6 paginiPM20CSJ060: Mitsubishi Intelligent Power ModulesJefferson GiovaniÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- 110 Waveform Generator Projects for the Home ConstructorDe la Everand110 Waveform Generator Projects for the Home ConstructorEvaluare: 4 din 5 stele4/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDe la EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlEvaluare: 5 din 5 stele5/5 (1)
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1De la EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Evaluare: 4.5 din 5 stele4.5/5 (3)
- ECNG3004 Control System ApplicationsDocument7 paginiECNG3004 Control System ApplicationsMarlon BoucaudÎncă nu există evaluări
- Topic 1 - IntroductionDocument34 paginiTopic 1 - IntroductionMarlon BoucaudÎncă nu există evaluări
- Emergency Telemetry Performance: Progress ReportDocument6 paginiEmergency Telemetry Performance: Progress ReportMarlon BoucaudÎncă nu există evaluări
- Topic 3 - Source CodingDocument65 paginiTopic 3 - Source CodingMarlon BoucaudÎncă nu există evaluări
- 2x Extruder MotorDocument24 pagini2x Extruder MotorMarlon BoucaudÎncă nu există evaluări
- In-Course Project Definition 0809Document4 paginiIn-Course Project Definition 0809Marlon BoucaudÎncă nu există evaluări
- ECNG3016 Practical 5Document7 paginiECNG3016 Practical 5Marlon BoucaudÎncă nu există evaluări
- ECNG3016 Practical 1Document21 paginiECNG3016 Practical 1Marlon BoucaudÎncă nu există evaluări
- ECNG3016 Practical 2Document13 paginiECNG3016 Practical 2Marlon BoucaudÎncă nu există evaluări
- ECNG3016 Practical 4Document7 paginiECNG3016 Practical 4Marlon BoucaudÎncă nu există evaluări
- Lesson 1: Cplds and Fpgas: Technology and Design FeaturesDocument23 paginiLesson 1: Cplds and Fpgas: Technology and Design FeaturesMarlon BoucaudÎncă nu există evaluări
- CommsII Problem Set 3 With AddendumDocument2 paginiCommsII Problem Set 3 With AddendumMarlon BoucaudÎncă nu există evaluări
- ECNG3016 Practical 3Document12 paginiECNG3016 Practical 3Marlon BoucaudÎncă nu există evaluări
- Processor Design: ImplementationDocument48 paginiProcessor Design: ImplementationMarlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument11 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon Boucaud100% (1)
- Lesson 4: Synchronous Design ArchitecturesDocument17 paginiLesson 4: Synchronous Design ArchitecturesMarlon BoucaudÎncă nu există evaluări
- Lesson 4: Synchronous Design Architectures: Data Path and High-Level Synthesis (Part Two)Document42 paginiLesson 4: Synchronous Design Architectures: Data Path and High-Level Synthesis (Part Two)Marlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument21 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudÎncă nu există evaluări
- Lesson 5: Processor Design: Topic 1 - Methods and ConceptsDocument57 paginiLesson 5: Processor Design: Topic 1 - Methods and ConceptsMarlon BoucaudÎncă nu există evaluări
- Lesson 3: Advanced Topics in VHDLDocument54 paginiLesson 3: Advanced Topics in VHDLMarlon BoucaudÎncă nu există evaluări
- Lesson 2: Advanced Aspects of Digital LogicDocument5 paginiLesson 2: Advanced Aspects of Digital LogicMarlon BoucaudÎncă nu există evaluări
- Lesson 4: Synchronous Design Architectures: Control Unit Design (Part Three)Document25 paginiLesson 4: Synchronous Design Architectures: Control Unit Design (Part Three)Marlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument11 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument25 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudÎncă nu există evaluări
- Answer All Questions Documents Are Not Allowed No Calculators AllowedDocument8 paginiAnswer All Questions Documents Are Not Allowed No Calculators AllowedMarlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument19 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudÎncă nu există evaluări
- ECNG3016 Course Calender 10 11 - Updated 14th Jan 2011Document1 paginăECNG3016 Course Calender 10 11 - Updated 14th Jan 2011Marlon BoucaudÎncă nu există evaluări
- ECNG 3016 Advanced Digital Electronics: Eneral NformationDocument10 paginiECNG 3016 Advanced Digital Electronics: Eneral NformationMarlon BoucaudÎncă nu există evaluări
- 5054 s17 QP 12 PDFDocument20 pagini5054 s17 QP 12 PDFmaarij aliÎncă nu există evaluări
- Thevenin and Norton EquivalentsDocument36 paginiThevenin and Norton EquivalentsJosé Guillermo De Chomón AranguenaÎncă nu există evaluări
- F5-1-Wave Calculation Answer 2 PDFDocument4 paginiF5-1-Wave Calculation Answer 2 PDFKhairul WarsÎncă nu există evaluări
- Boyles LawDocument29 paginiBoyles LawmerzechrisÎncă nu există evaluări
- Chapter 18 - Temperature, Heat, and The First Law of ThermodynamicsDocument18 paginiChapter 18 - Temperature, Heat, and The First Law of ThermodynamicsVV Cephei100% (1)
- Appendix F Steam TablesDocument45 paginiAppendix F Steam TablesHamza AliÎncă nu există evaluări
- Settlement of Shallow Foundation 2013Document154 paginiSettlement of Shallow Foundation 2013Dita Fitri100% (1)
- PHYSICS101Document23 paginiPHYSICS101Renzo L. MagatÎncă nu există evaluări
- Wave Force On Vertical WallsDocument55 paginiWave Force On Vertical WallsFares YaredÎncă nu există evaluări
- CHEM1001 Worksheet 4: Moles and Stoichiometry Model 1: Balancing Chemical EquationsDocument4 paginiCHEM1001 Worksheet 4: Moles and Stoichiometry Model 1: Balancing Chemical EquationsEllah Mae CaguladaÎncă nu există evaluări
- Grade 10 - Science - CompleteDocument19 paginiGrade 10 - Science - CompleteLucille Gacutan AramburoÎncă nu există evaluări
- Ee0301 Electrical and Electronics MeasurementsDocument8 paginiEe0301 Electrical and Electronics MeasurementsMaruthu Pandian50% (2)
- The Science of Bioenergetic Bioelectric TechnologiesDocument199 paginiThe Science of Bioenergetic Bioelectric TechnologiesKamen KaloqnkovÎncă nu există evaluări
- Free Electric Energy in Theory and PracticeDocument77 paginiFree Electric Energy in Theory and Practicesdio06Încă nu există evaluări
- The Physics of Waves and OscillationsDocument21 paginiThe Physics of Waves and OscillationsAbhijit0% (3)
- Frame Analysis PDFDocument56 paginiFrame Analysis PDFAKSÎncă nu există evaluări
- Uniform Linear ArrayDocument5 paginiUniform Linear ArrayBhargav SarvepalliÎncă nu există evaluări
- Neet Full Mock TestDocument31 paginiNeet Full Mock Testdhanan dhanan100% (2)
- Strength of Materials Aug 5 2017Document16 paginiStrength of Materials Aug 5 2017MikaellaTeniolaÎncă nu există evaluări
- Experiment 2: Uniformly Accelerated Motion Using Ticker-Tape TimerDocument8 paginiExperiment 2: Uniformly Accelerated Motion Using Ticker-Tape TimerLouise AltheaÎncă nu există evaluări
- Location Quantification of Pile Damages Dario CulapDocument10 paginiLocation Quantification of Pile Damages Dario CulaptutorialinformationÎncă nu există evaluări
- Test Series - 7/paper - II/ JEE - 2008: Vidyamandir ClassesDocument33 paginiTest Series - 7/paper - II/ JEE - 2008: Vidyamandir ClassesPrakash NikÎncă nu există evaluări
- Energy in A Collision Practice QuestionsDocument6 paginiEnergy in A Collision Practice Questionsrana elshaÎncă nu există evaluări
- Implementation of The Johnson-Holmquist II (JH-2) Constitutive Model Into DYNA3DDocument52 paginiImplementation of The Johnson-Holmquist II (JH-2) Constitutive Model Into DYNA3DsafaatÎncă nu există evaluări
- Fluid DynamicsDocument44 paginiFluid DynamicsMoosa Salim Al KharusiÎncă nu există evaluări
- Acs Question Bank 19-20Document1 paginăAcs Question Bank 19-20atika ingoleÎncă nu există evaluări