S-ar putea să vă placă și
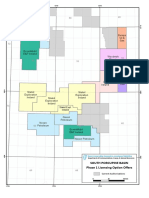
- South Porcupine Basin Phase 1 Licensing MapDocument1 paginăSouth Porcupine Basin Phase 1 Licensing MapkevenÎncă nu există evaluări
- Providence Contracts 3D Seismic Vessel For Survey Over Barryroe Oil Discovery in The North Celtic SeaDocument2 paginiProvidence Contracts 3D Seismic Vessel For Survey Over Barryroe Oil Discovery in The North Celtic SeakevenÎncă nu există evaluări
- Providence Withdraws From Kin Sale Head TransactionDocument2 paginiProvidence Withdraws From Kin Sale Head TransactionkevenÎncă nu există evaluări
- Baltimorefarm OutDocument2 paginiBaltimorefarm OutkevenÎncă nu există evaluări
- Providence Withdraws From Kin Sale Head TransactionDocument2 paginiProvidence Withdraws From Kin Sale Head TransactionkevenÎncă nu există evaluări
- Operational Update Dunquin Site Survey Underway: Embargo 7am 6 July 2010Document1 paginăOperational Update Dunquin Site Survey Underway: Embargo 7am 6 July 2010kevenÎncă nu există evaluări
- Dunquin Well Drilling BeginsDocument2 paginiDunquin Well Drilling BeginskevenÎncă nu există evaluări
- Dunquin Well Drilling BeginsDocument2 paginiDunquin Well Drilling BeginskevenÎncă nu există evaluări
- Providence and Shell Sign Memorandum of Agreement: Embargo 7am 7 February 2011Document2 paginiProvidence and Shell Sign Memorandum of Agreement: Embargo 7am 7 February 2011kevenÎncă nu există evaluări
- 2011 Celtic Sea Drilling UpdateDocument2 pagini2011 Celtic Sea Drilling UpdatekevenÎncă nu există evaluări
- Providence Secures Rig Slot For 2007 Drilling Programme Offshore IrelandDocument2 paginiProvidence Secures Rig Slot For 2007 Drilling Programme Offshore IrelandkevenÎncă nu există evaluări
- Drilling of Hook Head Well Commences: Providence Resources PLC ("Providence" or The "Company")Document2 paginiDrilling of Hook Head Well Commences: Providence Resources PLC ("Providence" or The "Company")kevenÎncă nu există evaluări
- Commercialupdate Spanishpointareafarm InbycairnDocument2 paginiCommercialupdate Spanishpointareafarm InbycairnkevenÎncă nu există evaluări
- CER16023 - Requirements of The Petroleum Safety FrameworkDocument78 paginiCER16023 - Requirements of The Petroleum Safety FrameworkkevenÎncă nu există evaluări
- CER16024 - Safety Case RequirementsDocument81 paginiCER16024 - Safety Case RequirementskevenÎncă nu există evaluări
- Operational Update: Dunquin North Exploration WellDocument3 paginiOperational Update: Dunquin North Exploration WellkevenÎncă nu există evaluări
- W017 002 Moloney Windows Systems Chart A2Document1 paginăW017 002 Moloney Windows Systems Chart A2kevenÎncă nu există evaluări
- Exploration Watch: Porcupine Basin - Focus of Major InterestDocument10 paginiExploration Watch: Porcupine Basin - Focus of Major InterestkevenÎncă nu există evaluări
- 1636Document14 pagini1636kevenÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- 206L3 MM CH63Document114 pagini206L3 MM CH63andres felipe sandoval porrasÎncă nu există evaluări
- Oisd STD 153Document34 paginiOisd STD 153Anonymous i3lI9M100% (3)
- Presentation PC01Document19 paginiPresentation PC01shubhendrasahaÎncă nu există evaluări
- PacificValvesCastSteelBoltedBonnetCatalogCV 421 PDFDocument28 paginiPacificValvesCastSteelBoltedBonnetCatalogCV 421 PDFGoutham KSÎncă nu există evaluări
- Diesel Injection System Naturally AspiratedDocument346 paginiDiesel Injection System Naturally AspiratedGreg Hanna100% (1)
- Owners Handbook BUKH U125Document79 paginiOwners Handbook BUKH U125Alexandros KontosÎncă nu există evaluări
- Lecture 2Document16 paginiLecture 2Ahmed K JirnazÎncă nu există evaluări
- Valve Lifting Mechanism V 700 .. 1800Document2 paginiValve Lifting Mechanism V 700 .. 1800ZewduErkyhunÎncă nu există evaluări
- Natural Gas and Propane Installation Code: CSA B149.1:20Document34 paginiNatural Gas and Propane Installation Code: CSA B149.1:20c tÎncă nu există evaluări
- Single Drum Winch Design Chapter 10Document54 paginiSingle Drum Winch Design Chapter 10kelvinyeoh100% (3)
- MXT ManualDocument40 paginiMXT ManualManuel Hernández OrozÎncă nu există evaluări
- JAG Neway Ball Valves PDFDocument32 paginiJAG Neway Ball Valves PDFprsiva2420034066Încă nu există evaluări
- AQUALISA Quartz and Visage Digital Showers - Features BrochureDocument4 paginiAQUALISA Quartz and Visage Digital Showers - Features Brochurevaltersk100% (1)
- Frese OPTIMA Compact ActuatorsDocument6 paginiFrese OPTIMA Compact ActuatorsrkssÎncă nu există evaluări
- Ervice AND Arts Anual: Elmhults Konstruktions AbDocument63 paginiErvice AND Arts Anual: Elmhults Konstruktions AbMelanie GerdesÎncă nu există evaluări
- Turbine Protection and Control SystemDocument19 paginiTurbine Protection and Control SystemArss Sakti SetyaÎncă nu există evaluări
- Manual Generador ONANDocument58 paginiManual Generador ONANandresmvargas1984100% (1)
- 31-SAMSS-006 - 2 July 2019 ERDocument15 pagini31-SAMSS-006 - 2 July 2019 ERjulius100% (1)
- 63MVA 220KV-66KV Power Transformer - Syd Specific 1 - TenderDocument103 pagini63MVA 220KV-66KV Power Transformer - Syd Specific 1 - TendermidhunvarÎncă nu există evaluări
- SS-15 BB II-H Wellhead SystemDocument20 paginiSS-15 BB II-H Wellhead Systemianherzog100% (1)
- Epr 1000 Triac PositionerDocument4 paginiEpr 1000 Triac PositionerAnderson SiqueiraÎncă nu există evaluări
- Mixer Parts-2012 PRP CatalogDocument78 paginiMixer Parts-2012 PRP CatalogNestor Oyaga BarriosÎncă nu există evaluări
- 399a PDFDocument47 pagini399a PDFJuan Juan100% (1)
- Orion 7F Rate Manip PDFDocument438 paginiOrion 7F Rate Manip PDFSoo Kuan CheongÎncă nu există evaluări
- Specification For Pipeline Valves & ActuatorsDocument50 paginiSpecification For Pipeline Valves & ActuatorsMuh_Hesan100% (2)
- System Operation, HEUIDocument34 paginiSystem Operation, HEUICuu LongÎncă nu există evaluări
- Arranque Dificil Dd15Document8 paginiArranque Dificil Dd15nicix100% (1)
- Manual r20t Sar Rev00.Document93 paginiManual r20t Sar Rev00.nigelÎncă nu există evaluări
- The Secret of Hydraulic Schematics-1-10Document10 paginiThe Secret of Hydraulic Schematics-1-10Erik Santiago100% (1)
- 4 MivDocument19 pagini4 Mivpavankumar001Încă nu există evaluări