S-ar putea să vă placă și
- SAMPLE MCQuestions ByTopicsDocument45 paginiSAMPLE MCQuestions ByTopicsVeeru ManikantaÎncă nu există evaluări
- Failure Theories..Document93 paginiFailure Theories..adnanmominÎncă nu există evaluări
- P3 Past Papers Model AnswersDocument211 paginiP3 Past Papers Model AnswersEyad UsamaÎncă nu există evaluări
- CoRdE, Cosserat Rod Elements For The Dynamic Simulation of One-Dimensional Elastic ObjectsDocument10 paginiCoRdE, Cosserat Rod Elements For The Dynamic Simulation of One-Dimensional Elastic Objectspezz07Încă nu există evaluări
- Quasi-Static Manipulation of A Kirchhoff Elastic Rod Based On A Geometric Analysis of Equilibrium ConfigurationsDocument21 paginiQuasi-Static Manipulation of A Kirchhoff Elastic Rod Based On A Geometric Analysis of Equilibrium ConfigurationsAkshay VarikÎncă nu există evaluări
- Linear Non Linear FEMDocument24 paginiLinear Non Linear FEMwial8295Încă nu există evaluări
- Drugg Drugg: University Faculty of Univerza FakultetaDocument48 paginiDrugg Drugg: University Faculty of Univerza FakultetaFestus SimbolonÎncă nu există evaluări
- Concentrated Plasticity ModelDocument2 paginiConcentrated Plasticity Modelmiguel angelÎncă nu există evaluări
- Bending and Buckling of General Laminated Curved Beams UsingDocument14 paginiBending and Buckling of General Laminated Curved Beams UsingMohammed ElmahjoubiÎncă nu există evaluări
- Discrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Document7 paginiDiscrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Antonio C. KeithÎncă nu există evaluări
- 4355 19761 1 PB - 2 PDFDocument12 pagini4355 19761 1 PB - 2 PDFNavneet SinghÎncă nu există evaluări
- Wccm2014 - v2 Form-Finding of Interlaced Space StructuresDocument12 paginiWccm2014 - v2 Form-Finding of Interlaced Space StructuresHua Hidari YangÎncă nu există evaluări
- CORDE Cosserat Rod Elements For The Dynamic Simulation of One Dimensional Elastic ObjectsDocument11 paginiCORDE Cosserat Rod Elements For The Dynamic Simulation of One Dimensional Elastic ObjectsCFÎncă nu există evaluări
- 1 s2.0 S2666496821000121 MainDocument10 pagini1 s2.0 S2666496821000121 MainAbdullah AbdullahÎncă nu există evaluări
- Alain Goriely and Michael Tabor - The Nonlinear Dynamics of FilamentsDocument33 paginiAlain Goriely and Michael Tabor - The Nonlinear Dynamics of FilamentsDopameÎncă nu există evaluări
- S. Neukirch and G.H.M Van Der Heijden - Geometry and Mechanics of Uniform N-Plies: From Engineering Ropes To Biological FilamentsDocument32 paginiS. Neukirch and G.H.M Van Der Heijden - Geometry and Mechanics of Uniform N-Plies: From Engineering Ropes To Biological FilamentsDopameÎncă nu există evaluări
- Design and Modelling of An Anti-Buckling Compliant Universal Joint With A Compact Configuration - ScienceDirectDocument43 paginiDesign and Modelling of An Anti-Buckling Compliant Universal Joint With A Compact Configuration - ScienceDirectEwerson MatiaÎncă nu există evaluări
- Scaled Down Models For Free Vibration Analysis of Orthogonally Stiffened Cylindrical Shells Using Similitude TheoryDocument12 paginiScaled Down Models For Free Vibration Analysis of Orthogonally Stiffened Cylindrical Shells Using Similitude Theoryaemis2010Încă nu există evaluări
- A Review On Stress and Deformation Analysis of Curved Beams Under Large DeflectionDocument27 paginiA Review On Stress and Deformation Analysis of Curved Beams Under Large DeflectionrockmanqhÎncă nu există evaluări
- Cyclic Analysis of RC Frames With Respect To Employing Different Methods in The Fiber Model For Consideration of Bond-Slip EffectDocument18 paginiCyclic Analysis of RC Frames With Respect To Employing Different Methods in The Fiber Model For Consideration of Bond-Slip EffectTAMANA SHAMSIÎncă nu există evaluări
- Elastodynamic Analysis of Low Tension Cables Using A New Curved Beam ElementDocument15 paginiElastodynamic Analysis of Low Tension Cables Using A New Curved Beam ElementSamiullahÎncă nu există evaluări
- NonlinearDocument13 paginiNonlinearharsh daveÎncă nu există evaluări
- TSP Cmes 42236Document15 paginiTSP Cmes 42236Rizwana JyotiÎncă nu există evaluări
- European Journal of Mechanics A/Solids: Andrea Panteghini, Lorenzo BardellaDocument15 paginiEuropean Journal of Mechanics A/Solids: Andrea Panteghini, Lorenzo BardellaGiuseppe FaillaÎncă nu există evaluări
- Analysis of Laminated Composite Beams Using Layerwise Displacement Theories PDFDocument13 paginiAnalysis of Laminated Composite Beams Using Layerwise Displacement Theories PDFmrjnhowardÎncă nu există evaluări
- J. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationDocument20 paginiJ. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationSevim GüçlüÎncă nu există evaluări
- Natural Frequency of Axially Functionally Graded, Tapered Cantilever Beamswith Tip Masses MahmoudDocument9 paginiNatural Frequency of Axially Functionally Graded, Tapered Cantilever Beamswith Tip Masses MahmoudDrm AmmÎncă nu există evaluări
- 2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDocument26 pagini2019 Goyal and Skelton - Tensegrity System Dynamics With Rigid Bars and Massive StringsDaniel MartinsÎncă nu există evaluări
- Modelo Simplificado de Fibra para Analisis InelasticoDocument13 paginiModelo Simplificado de Fibra para Analisis InelasticoHollman Putoy LópezÎncă nu există evaluări
- 1979 Cobbold Removal of StrainDocument6 pagini1979 Cobbold Removal of StrainYuri Vladimir Ordonez LamaÎncă nu există evaluări
- Case StudyDocument7 paginiCase StudyFrances Louise MarceloÎncă nu există evaluări
- Applied Sciences: Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered BeamsDocument21 paginiApplied Sciences: Slope Deflection Method in Nonlocal Axially Functionally Graded Tapered BeamsHakim HakimÎncă nu există evaluări
- Beam With Moving MassDocument33 paginiBeam With Moving MassCleves AxiomaÎncă nu există evaluări
- Applied Sciences: Generalized Beam Theory For Thin-Walled Beams With Curvilinear Open Cross-SectionsDocument18 paginiApplied Sciences: Generalized Beam Theory For Thin-Walled Beams With Curvilinear Open Cross-SectionshamzaÎncă nu există evaluări
- Metals: An Analytical Model For Stress and Curvature Prediction of A Strip Leveling ProcessDocument18 paginiMetals: An Analytical Model For Stress and Curvature Prediction of A Strip Leveling Processjose rogelio villaseñor gonzalezÎncă nu există evaluări
- Finite Element Analysis of Slab and A Comparative Study With Others Analytical SolutionDocument8 paginiFinite Element Analysis of Slab and A Comparative Study With Others Analytical SolutionNHEM KEAMÎncă nu există evaluări
- Nonlinear Dynamic Analysis of Frames With Plastic HingesDocument24 paginiNonlinear Dynamic Analysis of Frames With Plastic HingesCaraiane CatalinÎncă nu există evaluări
- Analytical Solutions of in Plane StaticDocument20 paginiAnalytical Solutions of in Plane Statichussain adelÎncă nu există evaluări
- Diffuse Field Transmission Into Infinite Sandwich Composite and Laminate Composite CylindersDocument34 paginiDiffuse Field Transmission Into Infinite Sandwich Composite and Laminate Composite Cylindersmuhammedbusra6716Încă nu există evaluări
- Li 2000Document19 paginiLi 2000emad samirÎncă nu există evaluări
- 1 s2.0 S014102962200788X MainDocument9 pagini1 s2.0 S014102962200788X MainQuang Thái NguyễnÎncă nu există evaluări
- Finite Element Analysis of Deep Beams On Nonlinear Elastic FoundationsDocument30 paginiFinite Element Analysis of Deep Beams On Nonlinear Elastic FoundationsMostafa NouhÎncă nu există evaluări
- Analytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalDocument12 paginiAnalytical Model For Beams On Elastic Foundations Considering The Coupling of HorizontalPrantik Adhar SamantaÎncă nu există evaluări
- On A Finite Element Model For The Analysis of Through Cracks in Laminated Anisotropic Cylindrical ShellsDocument16 paginiOn A Finite Element Model For The Analysis of Through Cracks in Laminated Anisotropic Cylindrical ShellsRavi TejaÎncă nu există evaluări
- Carrera 2013Document9 paginiCarrera 2013Mehrshad GhasemabadiÎncă nu există evaluări
- Linear Elastic Properties of 2D and 3D Models of Porous Materials Made From Elongated ObjectsDocument20 paginiLinear Elastic Properties of 2D and 3D Models of Porous Materials Made From Elongated ObjectsThaqibul Fikri NiyartamaÎncă nu există evaluări
- Finite Element of Composites PlateDocument20 paginiFinite Element of Composites PlaterushckyÎncă nu există evaluări
- Journal of The Brazilian Society of Mechanical Sciences and EngineeringDocument16 paginiJournal of The Brazilian Society of Mechanical Sciences and Engineeringsorin vÎncă nu există evaluări
- 06 - Chapter 2Document16 pagini06 - Chapter 2Sid ZainÎncă nu există evaluări
- Computers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezDocument15 paginiComputers and Structures: C. Martín Saravia, Sebastián P. Machado, Víctor H. CortínezKhalil DeghoumÎncă nu există evaluări
- International Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HoDocument25 paginiInternational Journal of Engineering Science: Wenbin Yu, Dewey H. Hodges, Jimmy C. HosquijanÎncă nu există evaluări
- European Journal of Mechanics A/Solids: Binglei Wang, Shenjie Zhou, Junfeng Zhao, Xi ChenDocument8 paginiEuropean Journal of Mechanics A/Solids: Binglei Wang, Shenjie Zhou, Junfeng Zhao, Xi ChenVarun JainÎncă nu există evaluări
- Model Order Reduction For Campbell Diagram Analysis of Shaft-Disc-Blade System in 3D Finite ElementsDocument18 paginiModel Order Reduction For Campbell Diagram Analysis of Shaft-Disc-Blade System in 3D Finite ElementsGogyÎncă nu există evaluări
- Engineering Structures: Omid Moammer, Kiarash M. DolatshahiDocument14 paginiEngineering Structures: Omid Moammer, Kiarash M. DolatshahiJhon Smit Gonzales UscataÎncă nu există evaluări
- Experiments and Theory in Strain Gradient PDFDocument32 paginiExperiments and Theory in Strain Gradient PDFAnonymous 17ihTauS5Încă nu există evaluări
- Renato Kresch and David MalahDocument32 paginiRenato Kresch and David MalahsatishmailaganiÎncă nu există evaluări
- Buckling Behavior of Curved Composite Beams With Different Elastic Response in Tension and CompressionDocument10 paginiBuckling Behavior of Curved Composite Beams With Different Elastic Response in Tension and CompressionFox_oNe_7Încă nu există evaluări
- Design and Analysis of Non-Linear Space Frames With Semi-Rigid ConnectionsDocument18 paginiDesign and Analysis of Non-Linear Space Frames With Semi-Rigid ConnectionsMerve MerveÎncă nu există evaluări
- JTheorBiol-1997-A Continuum Mechanics!Based Model For Cortical GrowthDocument12 paginiJTheorBiol-1997-A Continuum Mechanics!Based Model For Cortical GrowthYingjie ZhaoÎncă nu există evaluări
- 7 SEM78717C-softDocument9 pagini7 SEM78717C-softYOO SHINÎncă nu există evaluări
- Finite-Strain Three-Dimensional Solids With Rotational Degrees of Freedom: Non-Linear Statics and DynamicsDocument24 paginiFinite-Strain Three-Dimensional Solids With Rotational Degrees of Freedom: Non-Linear Statics and Dynamicsdjoumana ahmiediÎncă nu există evaluări
- Frequency Response Analysis of Higher Order Composite Sandwich Beams With Viscoelastic CoreDocument13 paginiFrequency Response Analysis of Higher Order Composite Sandwich Beams With Viscoelastic CoreVarun KumarÎncă nu există evaluări
- (1993) SEDS Deployer Design and Flight PerformanceDocument9 pagini(1993) SEDS Deployer Design and Flight Performancepezz07Încă nu există evaluări
- Power To Explore - A History of Marshall Space Flight Center 1960-1990 (Chap. 12 - The HST) - (A. J. Dunar, S. P. Waring)Document53 paginiPower To Explore - A History of Marshall Space Flight Center 1960-1990 (Chap. 12 - The HST) - (A. J. Dunar, S. P. Waring)pezz07Încă nu există evaluări
- HST - Cosmic Origins Spectrograph (COS)Document2 paginiHST - Cosmic Origins Spectrograph (COS)pezz07Încă nu există evaluări
- HST - Wide Field Camera 3 (WFC3)Document2 paginiHST - Wide Field Camera 3 (WFC3)pezz07Încă nu există evaluări
- ASPERA-3 - Scientific and Technicakl Plan (Mars Express)Document50 paginiASPERA-3 - Scientific and Technicakl Plan (Mars Express)pezz07Încă nu există evaluări
- Optics of The Hubble Space Telescope - (D.G. Simpson)Document5 paginiOptics of The Hubble Space Telescope - (D.G. Simpson)pezz07Încă nu există evaluări
- Modeling of A Cast Aluminium Wheel For Crash Application - (Y. Léost, A. Sonntag, T. Haase)Document10 paginiModeling of A Cast Aluminium Wheel For Crash Application - (Y. Léost, A. Sonntag, T. Haase)pezz07Încă nu există evaluări
- Optional Strain-Rate Forms For The Johnson Cook Constitutive Model and The Role of The Parameter Epsilon - 0Document14 paginiOptional Strain-Rate Forms For The Johnson Cook Constitutive Model and The Role of The Parameter Epsilon - 0sureshÎncă nu există evaluări
- 24 Schneider Impact DynamicsDocument11 pagini24 Schneider Impact DynamicsKivanc SengozÎncă nu există evaluări
- Predicting The Dynamic Behaviour of Hydrobushings - (G. Negrete, A. Rivs, J. Viñolas)Document18 paginiPredicting The Dynamic Behaviour of Hydrobushings - (G. Negrete, A. Rivs, J. Viñolas)pezz07Încă nu există evaluări
- Predicting The Dynamic Behaviour of Hydrobushings - (G. Negrete, A. Rivs, J. Viñolas)Document18 paginiPredicting The Dynamic Behaviour of Hydrobushings - (G. Negrete, A. Rivs, J. Viñolas)pezz07Încă nu există evaluări
- MD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFDocument602 paginiMD Nastran R3 - Explicit Nonlinear SOL 700 User's Guide PDFpezz07Încă nu există evaluări
- A Constitutive Model and Data For MetalsDocument7 paginiA Constitutive Model and Data For Metalsbouazoth100% (1)
- Application of Impact Analysis For Aluminum Wheel With Inflated Tire - (S. Ishikawa, Y. Sakai, N. Nosaka)Document12 paginiApplication of Impact Analysis For Aluminum Wheel With Inflated Tire - (S. Ishikawa, Y. Sakai, N. Nosaka)pezz07Încă nu există evaluări
- Modelling Soft Body Impact On Composite Structures - (A. Johnson, M. Holzapfel)Document11 paginiModelling Soft Body Impact On Composite Structures - (A. Johnson, M. Holzapfel)pezz07Încă nu există evaluări
- Wheel Impect Test PDFDocument4 paginiWheel Impect Test PDFMechWellÎncă nu există evaluări
- Impact Dynamics, Theory and Experiment - (J. A. Zukas) PDFDocument66 paginiImpact Dynamics, Theory and Experiment - (J. A. Zukas) PDFpezz07Încă nu există evaluări
- Impact-Test & Radial Impact-Test - MAKRA DatasheetDocument8 paginiImpact-Test & Radial Impact-Test - MAKRA Datasheetpezz07Încă nu există evaluări
- Simulation and Test Correlation of Wheel Impact Test - (M. Billal Kamal)Document8 paginiSimulation and Test Correlation of Wheel Impact Test - (M. Billal Kamal)pezz07100% (1)
- Modeling of A Cast Aluminium Wheel For Crash Application - (Y. Léost, A. Sonntag, T. Haase)Document10 paginiModeling of A Cast Aluminium Wheel For Crash Application - (Y. Léost, A. Sonntag, T. Haase)pezz07Încă nu există evaluări
- SPH BirdStrike StepByStep Abaqus611 PDFDocument9 paginiSPH BirdStrike StepByStep Abaqus611 PDFpezz07Încă nu există evaluări
- Finite Element Analysis of Bird Strikes On Composite and Glass Panels - (K. C. Chuan)Document89 paginiFinite Element Analysis of Bird Strikes On Composite and Glass Panels - (K. C. Chuan)pezz07Încă nu există evaluări
- Modelling of Impact Forces and Pressures in Lagrangian Bird Strike Analyses - (A. Airoldi, B. Cacchione)Document27 paginiModelling of Impact Forces and Pressures in Lagrangian Bird Strike Analyses - (A. Airoldi, B. Cacchione)pezz07Încă nu există evaluări
- Impact Analysis of Aluminum Alloy Wheel - (V. Sivakrishna, J. Balabashker) PDFDocument11 paginiImpact Analysis of Aluminum Alloy Wheel - (V. Sivakrishna, J. Balabashker) PDFpezz07Încă nu există evaluări
- New FeatDocument66 paginiNew Featpezz07Încă nu există evaluări
- Composites Tutorial WIPDocument35 paginiComposites Tutorial WIPLakshminarayan GowdaÎncă nu există evaluări
- The Essence of Technology Is by No Means Anything TechnologicalDocument22 paginiThe Essence of Technology Is by No Means Anything TechnologicalJerstine Airah SumadsadÎncă nu există evaluări
- Wine TourismDocument9 paginiWine Tourismyarashovanilufar1999Încă nu există evaluări
- Daftar ObatDocument18 paginiDaftar Obatyuyun hanakoÎncă nu există evaluări
- Unit 2: Air Intake and Exhaust SystemsDocument10 paginiUnit 2: Air Intake and Exhaust SystemsMahmmod Al-QawasmehÎncă nu există evaluări
- Object Oriented ParadigmDocument2 paginiObject Oriented ParadigmDickson JohnÎncă nu există evaluări
- Regulasi KampenDocument81 paginiRegulasi KampenIrWaN Dompu100% (2)
- Cause Analysis For Spun Pile Crack and BrokenDocument11 paginiCause Analysis For Spun Pile Crack and BrokenRony LesbtÎncă nu există evaluări
- Vetoset CA541: Thickbed Cementitious Tile AdhesiveDocument2 paginiVetoset CA541: Thickbed Cementitious Tile Adhesivemus3b1985Încă nu există evaluări
- AMS ANALITICA-AIRFLOW TSP-HVS BrochureDocument1 paginăAMS ANALITICA-AIRFLOW TSP-HVS BrochureShady HellaÎncă nu există evaluări
- G.Devendiran: Career ObjectiveDocument2 paginiG.Devendiran: Career ObjectiveSadha SivamÎncă nu există evaluări
- str-w6754 Ds enDocument8 paginistr-w6754 Ds enAdah BumbonÎncă nu există evaluări
- Arudha PDFDocument17 paginiArudha PDFRakesh Singh100% (1)
- Dec 2-7 Week 4 Physics DLLDocument3 paginiDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Life and Works of Jose Rizal Modified ModuleDocument96 paginiLife and Works of Jose Rizal Modified ModuleRamos, Queencie R.Încă nu există evaluări
- MSDS Buffer Solution PH 4.0Document5 paginiMSDS Buffer Solution PH 4.0Ardhy LazuardyÎncă nu există evaluări
- Data SheetDocument56 paginiData SheetfaycelÎncă nu există evaluări
- 11-Rubber & PlasticsDocument48 pagini11-Rubber & PlasticsJack NgÎncă nu există evaluări
- Ultra Electronics Gunfire LocatorDocument10 paginiUltra Electronics Gunfire LocatorPredatorBDU.comÎncă nu există evaluări
- Configuration Guide - Interface Management (V300R007C00 - 02)Document117 paginiConfiguration Guide - Interface Management (V300R007C00 - 02)Dikdik PribadiÎncă nu există evaluări
- MLX90614Document44 paginiMLX90614ehsan1985Încă nu există evaluări
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 paginiEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseÎncă nu există evaluări
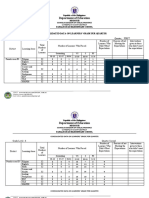
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 paginiDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaÎncă nu există evaluări
- Control ValvesDocument95 paginiControl ValvesHardik Acharya100% (1)
- Uniform Motion WorksheetDocument8 paginiUniform Motion Worksheetnikhil patro100% (1)
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDocument2 paginiIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahÎncă nu există evaluări
- Aditya Academy Syllabus-II 2020Document7 paginiAditya Academy Syllabus-II 2020Tarun MajumdarÎncă nu există evaluări
- Waves and Ocean Structures Journal of Marine Science and EngineeringDocument292 paginiWaves and Ocean Structures Journal of Marine Science and Engineeringheinz billÎncă nu există evaluări
- L GSR ChartsDocument16 paginiL GSR ChartsEmerald GrÎncă nu există evaluări