S-ar putea să vă placă și
- 1982-Date-Jimbo-Kashiwara-Miwa-Quasi-periodic Solutions of The Orthogonal KP-Publ - RIMSDocument10 pagini1982-Date-Jimbo-Kashiwara-Miwa-Quasi-periodic Solutions of The Orthogonal KP-Publ - RIMSmm.mm.mabcmÎncă nu există evaluări
- Real Analysis and Probability: Solutions to ProblemsDe la EverandReal Analysis and Probability: Solutions to ProblemsÎncă nu există evaluări
- University of Manitoba, CanadaDocument12 paginiUniversity of Manitoba, CanadaramziÎncă nu există evaluări
- On Sequences Defined by Linear Recurrence Relations : (2) U +K + Aiun+K-X + + Aku A, 0Document9 paginiOn Sequences Defined by Linear Recurrence Relations : (2) U +K + Aiun+K-X + + Aku A, 0Anonymous bk7we8Încă nu există evaluări
- Atiyah Bott Shapiro Clifford ModulesDocument36 paginiAtiyah Bott Shapiro Clifford Modulespurple_vase100% (1)
- Generalized Stirling Number Pairs Associated With Inverse RelationsDocument6 paginiGeneralized Stirling Number Pairs Associated With Inverse RelationsCharlie PinedoÎncă nu există evaluări
- The Reciprocal of The Bessel Function F. T. HowardDocument8 paginiThe Reciprocal of The Bessel Function F. T. HowardCharlie PinedoÎncă nu există evaluări
- Introduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFDocument61 paginiIntroduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFmanuelomar87Încă nu există evaluări
- MathSlov 50-2000-2 5Document10 paginiMathSlov 50-2000-2 5mirceamercaÎncă nu există evaluări
- Time Series Analysis Univariate and Multivariate Methods by William Wei PDF Pages 30 35Document6 paginiTime Series Analysis Univariate and Multivariate Methods by William Wei PDF Pages 30 35drs akmlÎncă nu există evaluări
- Arithmetic Sequences of Higher Order: U U U U 1 N n+1-3Document6 paginiArithmetic Sequences of Higher Order: U U U U 1 N n+1-3Charlie PinedoÎncă nu există evaluări
- EE 4314 - Control Systems: Inverse Laplace TransformDocument8 paginiEE 4314 - Control Systems: Inverse Laplace TransformNick NumlkÎncă nu există evaluări
- Solutions To Exercises: - f3 f333 2V3f33U 3f3uu DDocument31 paginiSolutions To Exercises: - f3 f333 2V3f33U 3f3uu DLuis Miguel Angel Lizarraga MattoÎncă nu există evaluări
- (Solutions) Kittel - Introduction To Solid State Physics 8Th EditionDocument60 pagini(Solutions) Kittel - Introduction To Solid State Physics 8Th EditionCody Foster0% (1)
- Conolly 1955Document2 paginiConolly 1955Denis JaissonÎncă nu există evaluări
- Coulson 1967Document8 paginiCoulson 1967ir.noselidzeÎncă nu există evaluări
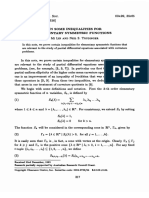
- On Some Inequalities For Elementary Symmetric Functions: Bull. Austral. Math. Soc. 0 0 A 9 9, 3 5 J 6 5Document10 paginiOn Some Inequalities For Elementary Symmetric Functions: Bull. Austral. Math. Soc. 0 0 A 9 9, 3 5 J 6 5George KaragiannidisÎncă nu există evaluări
- Nedjadi1993 PDFDocument13 paginiNedjadi1993 PDFmaycolÎncă nu există evaluări
- Lawrence Berkeley Laboratory, Berkeley, CA 94720 : Modes of Elliptical Waveguides A Correction LBL - 28702Document14 paginiLawrence Berkeley Laboratory, Berkeley, CA 94720 : Modes of Elliptical Waveguides A Correction LBL - 28702AmanÎncă nu există evaluări
- Recurrences For The Coefficients of Series Expansions With Respect To Classical Orthogonal PolynomialsDocument20 paginiRecurrences For The Coefficients of Series Expansions With Respect To Classical Orthogonal PolynomialsLuis Alberto FuentesÎncă nu există evaluări
- Math s4 v2 Article-31Document20 paginiMath s4 v2 Article-31insightstudios33Încă nu există evaluări
- Electronics Letters: The Institution of Electrical EngineersDocument2 paginiElectronics Letters: The Institution of Electrical EngineersshirtquittersÎncă nu există evaluări
- Pacific Journal of Mathematics: Multiple Harmonic SeriesDocument19 paginiPacific Journal of Mathematics: Multiple Harmonic SeriesnunocalistoÎncă nu există evaluări
- Solution For Chapter 22Document5 paginiSolution For Chapter 22Sveti JeronimÎncă nu există evaluări
- 1958 11sequencesDocument11 pagini1958 11sequencesvahidmesic45Încă nu există evaluări
- 7.0 Formal Derivation of The Discrete-Time Kalman Filter: Theorem 7-1 Given A Set of MeasurementsDocument15 pagini7.0 Formal Derivation of The Discrete-Time Kalman Filter: Theorem 7-1 Given A Set of Measurementsgirithik14Încă nu există evaluări
- 1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.Document6 pagini1981-Date-Kashiwara-Miwa-Vertex Operatprs and Tau Func.-Transformation Groups For Solitons Eq.-Proc - Jpn.Acad.mm.mm.mabcmÎncă nu există evaluări
- Complete Root LocusDocument15 paginiComplete Root LocusZagrebas EightpackÎncă nu există evaluări
- Dependenciadoreferencial Paracontribuicaodaproducaoedpar PDFDocument5 paginiDependenciadoreferencial Paracontribuicaodaproducaoedpar PDFJonatan PaschoalÎncă nu există evaluări
- 1986 Renormalization Group Analysis of Turbulence (5P)Document5 pagini1986 Renormalization Group Analysis of Turbulence (5P)LeeSM JacobÎncă nu există evaluări
- Bonifacio 1987 0054Document6 paginiBonifacio 1987 0054Particle Beam Physics LabÎncă nu există evaluări
- Shift-Register Synthesis (Modulo M)Document23 paginiShift-Register Synthesis (Modulo M)Shravan KumarÎncă nu există evaluări
- High Field Transport in Semiconductors. The Drifted Maxwellian Approach. I. General TheoryDocument12 paginiHigh Field Transport in Semiconductors. The Drifted Maxwellian Approach. I. General Theorysh0001Încă nu există evaluări
- Wick's: Multiphonon Theory: Generalized Theorem and Recursion FormulasDocument14 paginiWick's: Multiphonon Theory: Generalized Theorem and Recursion Formulaskibur1Încă nu există evaluări
- Complex Arithmetic Through CordicDocument11 paginiComplex Arithmetic Through CordicZhi ChenÎncă nu există evaluări
- MT221 Ejemplos LGRDocument11 paginiMT221 Ejemplos LGRJoaquin Villacorta NerviÎncă nu există evaluări
- Journal of Computational Physics (1970) : 6, (k2), rSI (KZ) P (k2) 6g' (k2) I8jz' (k2)Document4 paginiJournal of Computational Physics (1970) : 6, (k2), rSI (KZ) P (k2) 6g' (k2) I8jz' (k2)apooladiÎncă nu există evaluări
- fl-AUTOMORPHISMS OF R ( (X) )Document19 paginifl-AUTOMORPHISMS OF R ( (X) )Mohamed KhalifaÎncă nu există evaluări
- ON THE CUBIC RESIDUES NUMBERS AND k-POWER COMPLEMENT NUMBERSDocument6 paginiON THE CUBIC RESIDUES NUMBERS AND k-POWER COMPLEMENT NUMBERSRyanEliasÎncă nu există evaluări
- Jack Weinstein, Bott Characteristics of Cell ComplexesDocument7 paginiJack Weinstein, Bott Characteristics of Cell ComplexesJack WeinsteinÎncă nu există evaluări
- Splitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainDocument10 paginiSplitting of Some More Spaces: Math. Proc. Camb. Phil. Soc. (1979), 86, 227 2 2 7 Printed in Great BritainEpic WinÎncă nu există evaluări
- Equation-Of-Motion Impurity Anderson Model With Finite Coulomb Repulsion BDocument4 paginiEquation-Of-Motion Impurity Anderson Model With Finite Coulomb Repulsion BBilal TariqÎncă nu există evaluări
- On Imbedding Theorems For Besov Spaces: of Functions Defined in General RegionsDocument26 paginiOn Imbedding Theorems For Besov Spaces: of Functions Defined in General RegionsAnibal Coronel PerezÎncă nu există evaluări
- On The Generation of Semigroups of Linear Operators: HillipsDocument31 paginiOn The Generation of Semigroups of Linear Operators: HillipsVe LopiÎncă nu există evaluări
- A Cyclotomic Contruction For Leech's LatticesDocument6 paginiA Cyclotomic Contruction For Leech's LatticesVictor MaximianoÎncă nu există evaluări
- 16 6Document100 pagini16 6ksr131Încă nu există evaluări
- Statistical ConvergenceDocument13 paginiStatistical ConvergenceUday Shankar ChakrabortyÎncă nu există evaluări
- This Content Downloaded From 103.255.5.56 On Sat, 02 Oct 2021 01:36:58 UTCDocument13 paginiThis Content Downloaded From 103.255.5.56 On Sat, 02 Oct 2021 01:36:58 UTCMunam Shahzad MughalÎncă nu există evaluări
- The Discrete Fourier Series: K X (N) WNDocument5 paginiThe Discrete Fourier Series: K X (N) WNapi-127299018Încă nu există evaluări
- Oxtoby. Conjuntos ErgódicosDocument21 paginiOxtoby. Conjuntos ErgódicosNavikov Suarz NavÎncă nu există evaluări
- Sol4 PDFDocument6 paginiSol4 PDFMimo MolioÎncă nu există evaluări
- Overshoot Free Pi Controller Tuning Based On Pole AssignmentDocument5 paginiOvershoot Free Pi Controller Tuning Based On Pole AssignmentEngr Nayyer Nayyab MalikÎncă nu există evaluări
- Wall-Adapting Local Eddy-Viscosity Models For Simulations in Complex GeometriesDocument7 paginiWall-Adapting Local Eddy-Viscosity Models For Simulations in Complex GeometriesMatheus MarquesÎncă nu există evaluări
- An Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorDocument19 paginiAn Axiomatization of The Lattice of Higher Relative Commutants of A SubfactorHua WangÎncă nu există evaluări
- Methods For Automated Design For Singleton Fuzzy Logic ControllerDocument5 paginiMethods For Automated Design For Singleton Fuzzy Logic ControllerShreyansh ShahÎncă nu există evaluări
- Peskin QFT SolutionsDocument173 paginiPeskin QFT SolutionsAmir Iqbal100% (12)
- Simplicial Calculus With Geometric Algebra PDFDocument17 paginiSimplicial Calculus With Geometric Algebra PDFAlireza TakrimiÎncă nu există evaluări
- Toeplitz Operators On The Segal-Bargmann SpaceDocument17 paginiToeplitz Operators On The Segal-Bargmann SpaceZRichard61Încă nu există evaluări
- Tomotada Ohtsuki - A Cabling Formula For The 2-Loop Polynomial of KnotsDocument16 paginiTomotada Ohtsuki - A Cabling Formula For The 2-Loop Polynomial of KnotsGmoniconÎncă nu există evaluări
- Solutions of The Equation Exact Solutions Some Partial Differential Equations in Mechanics and PhysicsDocument17 paginiSolutions of The Equation Exact Solutions Some Partial Differential Equations in Mechanics and PhysicsmennaÎncă nu există evaluări
- Electric Motor Controls TutorialDocument24 paginiElectric Motor Controls TutorialKim KeatÎncă nu există evaluări
- U.S. Capitol Building: Case StudyDocument1 paginăU.S. Capitol Building: Case StudyKim KeatÎncă nu există evaluări
- Pitch Factor N Distribution FactorDocument5 paginiPitch Factor N Distribution FactorKim KeatÎncă nu există evaluări
- Tutorial 3 - July 2010Document9 paginiTutorial 3 - July 2010Kim KeatÎncă nu există evaluări
- Servo Drive TuningDocument15 paginiServo Drive TuningKim KeatÎncă nu există evaluări
- Testing & Commissioning Procedure (Electrical)Document100 paginiTesting & Commissioning Procedure (Electrical)Roland Nicolas100% (1)
- Trading Forex What Investors Need To KnowDocument24 paginiTrading Forex What Investors Need To KnowTanoj PandeyÎncă nu există evaluări
- Transistor Circuit NotesDocument15 paginiTransistor Circuit NotesKim KeatÎncă nu există evaluări
- Fault Location Detection On Tapped Transmission LinesDocument10 paginiFault Location Detection On Tapped Transmission LinesKim KeatÎncă nu există evaluări
- Mosquito Repellent Finish of Cotton Fabric by Extracting Castor OilDocument6 paginiMosquito Repellent Finish of Cotton Fabric by Extracting Castor OilTRUSHA PITHADIYAÎncă nu există evaluări
- Asic Flow: Synopsys - ConstraintsDocument2 paginiAsic Flow: Synopsys - ConstraintsarghaÎncă nu există evaluări
- Sizing BasicsDocument38 paginiSizing BasicsAmir YasinÎncă nu există evaluări
- Geotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Document2 paginiGeotechnical Engineering - I: B.E. (Civil Engineering) Fourth Semester (C.B.S.)Praveen KumarÎncă nu există evaluări
- LatexDocument4 paginiLatexDwi MayuÎncă nu există evaluări
- Persepsi Masyarakat Terhadap Aplikasi Tiktok Sebagai Media Menurunkan Tingkat Stres Di Era Pandemi Covid-19Document7 paginiPersepsi Masyarakat Terhadap Aplikasi Tiktok Sebagai Media Menurunkan Tingkat Stres Di Era Pandemi Covid-19Syifa KhaerunnisaÎncă nu există evaluări
- Kritika Pandey (Kaushambi)Document15 paginiKritika Pandey (Kaushambi)nishink9Încă nu există evaluări
- Pedo Clinical Notes 1. Frankel Behaviour Scaling GradeDocument8 paginiPedo Clinical Notes 1. Frankel Behaviour Scaling GradeleeminhoangrybirdÎncă nu există evaluări
- DKMU - Introduction To The DKMUDocument30 paginiDKMU - Introduction To The DKMUjefry100% (2)
- Applied Thermodynamics IIDocument124 paginiApplied Thermodynamics IIHimanshu1712100% (2)
- Quiz1 ISDS361BDocument4 paginiQuiz1 ISDS361BAnh PhamÎncă nu există evaluări
- Modeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDocument10 paginiModeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDhirendra Kumar PandeyÎncă nu există evaluări
- Linda Raschke's 50 Time-Tested Trading RulesDocument4 paginiLinda Raschke's 50 Time-Tested Trading RulesISB3 333100% (1)
- Nonverbal Communication in The WorkplaceDocument7 paginiNonverbal Communication in The WorkplaceHenrissa Granado TalanÎncă nu există evaluări
- The ChE As Sherlock Holmes Investigating Process IncidentsDocument7 paginiThe ChE As Sherlock Holmes Investigating Process IncidentsCamilo MoraÎncă nu există evaluări
- Holliday - Native SpeakerismDocument3 paginiHolliday - Native SpeakerismDánisaGarderesÎncă nu există evaluări
- 18-24 July 2009Document16 pagini18-24 July 2009pratidinÎncă nu există evaluări
- Introduction To Marketing ManagementDocument24 paginiIntroduction To Marketing ManagementDrRuchi GargÎncă nu există evaluări
- Epilogue Magazine, March 2010Document56 paginiEpilogue Magazine, March 2010Epilogue MagazineÎncă nu există evaluări
- Prelims Coe Elec2Document72 paginiPrelims Coe Elec2Sheena SapuayÎncă nu există evaluări
- Lecture Slides: Elementary StatisticsDocument129 paginiLecture Slides: Elementary StatisticsHassan HusseinÎncă nu există evaluări
- Jchps 6 (4) 15 Page 286-292 MsreddyDocument7 paginiJchps 6 (4) 15 Page 286-292 MsreddydwahyusafriÎncă nu există evaluări
- Correspondence Option: Society of Cosmetic Chemists South Africa Tel:011 792-4531 Email:bridget@coschem - Co.zaDocument1 paginăCorrespondence Option: Society of Cosmetic Chemists South Africa Tel:011 792-4531 Email:bridget@coschem - Co.zanblaksÎncă nu există evaluări
- Gerflor Card Taralay Impression Uni en - PDF - 348 - EnrichDocument12 paginiGerflor Card Taralay Impression Uni en - PDF - 348 - EnrichMartinÎncă nu există evaluări
- Walpole Ch01Document31 paginiWalpole Ch01Fadi MahfouzÎncă nu există evaluări
- Aa GTG 000024Document35 paginiAa GTG 000024Edith Moreno UrzuaÎncă nu există evaluări
- CV - Nhan - EnglishDocument4 paginiCV - Nhan - EnglishnhanpcÎncă nu există evaluări
- Mil STD 1316e Fuze DesignDocument25 paginiMil STD 1316e Fuze Designscorpion_l_81Încă nu există evaluări
- "Uncontrolled Desires": The Response To The Sexual Psychopath, 1920-1960Document25 pagini"Uncontrolled Desires": The Response To The Sexual Psychopath, 1920-1960ukladsil7020Încă nu există evaluări
- NRB Bank ReportDocument49 paginiNRB Bank ReportTanvirBariÎncă nu există evaluări