S-ar putea să vă placă și
- Taller Circuitos Con DiodosDocument2 paginiTaller Circuitos Con DiodosRONALD STIVEN BEJARANO LARRAHONDOÎncă nu există evaluări
- Electrónica para Ingenieros Bjt-12.6Document90 paginiElectrónica para Ingenieros Bjt-12.6Ronald Molina Bravo100% (1)
- Taller Sobre VectoresDocument2 paginiTaller Sobre VectoresLeonardo CorzoÎncă nu există evaluări
- Cinematic ADocument9 paginiCinematic ASzni VenturaÎncă nu există evaluări
- TA1 - Capitulo1 - Automatizacion de Procesos IndustrialesDocument67 paginiTA1 - Capitulo1 - Automatizacion de Procesos IndustrialesGeorge LucasÎncă nu există evaluări
- Control de Potencia de CD Por SCRDocument4 paginiControl de Potencia de CD Por SCRmaxÎncă nu există evaluări
- TEMA 10 ProblemasDocument40 paginiTEMA 10 ProblemasByron GonzálezÎncă nu există evaluări
- Ilovepdf Merged PDFDocument6 paginiIlovepdf Merged PDFEduardo Saavedra LizarazúÎncă nu există evaluări
- De Martin Negrin Guillermo TRABAJO 10Document15 paginiDe Martin Negrin Guillermo TRABAJO 10GuillermoÎncă nu există evaluări
- Informe 4 Oscilador SCRDocument11 paginiInforme 4 Oscilador SCRCristian Yoel Miranda JaraÎncă nu există evaluări
- Motor GiroDocument3 paginiMotor GiroJoha BermudezÎncă nu există evaluări
- Solucionario Segundo Parcial I-2021Document4 paginiSolucionario Segundo Parcial I-2021Alverto FernandezÎncă nu există evaluări
- B) Metodo Paso A PasoDocument4 paginiB) Metodo Paso A PasoandreÎncă nu există evaluări
- Ejercicios de FisicaDocument4 paginiEjercicios de FisicaEdwin VargasÎncă nu există evaluări
- POLEASDocument16 paginiPOLEASPositiva HDÎncă nu există evaluări
- Me II 204 Operacion Dinamica de Maquinas Electricas AmpliadaDocument32 paginiMe II 204 Operacion Dinamica de Maquinas Electricas AmpliadaEdgar Vidal Espinoza OrtegaÎncă nu există evaluări
- Formulario Unidad 2 Diseño MecanicoDocument7 paginiFormulario Unidad 2 Diseño MecanicoYuleimyÎncă nu există evaluări
- Cuaderno Teoría ElectromagnéticaDocument21 paginiCuaderno Teoría ElectromagnéticaEnrique RehaÎncă nu există evaluări
- Ley de Coulomb e IntensidadDocument18 paginiLey de Coulomb e IntensidadDanilo Ninacuri0% (1)
- Diseño y Análisis de Un Sensor TPMSDocument9 paginiDiseño y Análisis de Un Sensor TPMSAngel MingaÎncă nu există evaluări
- Unidad 1 Rectificadores No Controlados PDFDocument13 paginiUnidad 1 Rectificadores No Controlados PDFLuis Felipe Lopez PerezÎncă nu există evaluări
- Sistemas DigitalesDocument3 paginiSistemas DigitalesBrandon GuerreroÎncă nu există evaluări
- Dinamicas TrabajoDocument6 paginiDinamicas TrabajoGeoffreyW.SalasDelgadoÎncă nu există evaluări
- 06 Fet Como ConmutadorDocument6 pagini06 Fet Como ConmutadorRodrigo GonzalezÎncă nu există evaluări
- CODIFICACION BINARIA (Paper Teoria)Document6 paginiCODIFICACION BINARIA (Paper Teoria)Joseph Muje RamosÎncă nu există evaluări
- CortacircuitosDocument8 paginiCortacircuitosoncemunicipalÎncă nu există evaluări
- Guía Práctica de Matlab - CDDocument8 paginiGuía Práctica de Matlab - CDjaimeÎncă nu există evaluări
- La Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFDocument4 paginiLa Funcion de Transferencia Graficos de Flujo de Señal y Diagramas de Bloques PDFEdwin Max RChÎncă nu există evaluări
- Monografia Auto Solar TecnoDocument32 paginiMonografia Auto Solar TecnoJuan Cruz AyalaÎncă nu există evaluări
- Simulacion de Circuitos Neumaticos en FluidsimDocument15 paginiSimulacion de Circuitos Neumaticos en FluidsimWeimar G. SalazarÎncă nu există evaluări
- 3 - Circuitos Con Dos TransistoresDocument4 pagini3 - Circuitos Con Dos TransistoresDadwin Zavala Bautista100% (2)
- Ejercicios de PLC RelevaciónDocument4 paginiEjercicios de PLC RelevaciónSaulCastilloÎncă nu există evaluări
- Campos ElectromagnéticosDocument5 paginiCampos Electromagnéticoseduardo cueva0% (1)
- Regiones Simple y Multiplemente Conexas - PresentacionDocument21 paginiRegiones Simple y Multiplemente Conexas - Presentacionmarkus_x86Încă nu există evaluări
- Laboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorDocument8 paginiLaboratorio Diodos y Transistores Como Interruptor (Switch) y AmplificadorAndres JoseÎncă nu există evaluări
- Tutomat SolucionarioDocument28 paginiTutomat Solucionario'Jhon AlexanderÎncă nu există evaluări
- Problemas de Circuitos ElectricosDocument8 paginiProblemas de Circuitos ElectricosJunab Andrés CabañasÎncă nu există evaluări
- Sistema Mecánico TraslacionalDocument2 paginiSistema Mecánico TraslacionalMario Roberto100% (1)
- Prueba Cap. 9Document4 paginiPrueba Cap. 9Darwin TapuyÎncă nu există evaluări
- Compendio de Practicas Sensores 2005Document50 paginiCompendio de Practicas Sensores 2005zhefyroÎncă nu există evaluări
- Ficha Tecnica Domotica Myhome BticinoDocument504 paginiFicha Tecnica Domotica Myhome Bticinoirene100% (1)
- Flujos de Señal en Sistemas de Control ModernoDocument9 paginiFlujos de Señal en Sistemas de Control ModernoEduardo Lopez AntonioÎncă nu există evaluări
- 2 Partes de La Maquina de C.CDocument36 pagini2 Partes de La Maquina de C.CPambazo JuarezÎncă nu există evaluări
- Convertidor BuckBoostDocument9 paginiConvertidor BuckBoostLuchinEQÎncă nu există evaluări
- Clase 8 El MICROCONTROLADOR - Familia PICDocument18 paginiClase 8 El MICROCONTROLADOR - Familia PICMiltonÎncă nu există evaluări
- Ejercicios Potencia en CADocument4 paginiEjercicios Potencia en CAjuanjo1954100% (2)
- Contador de Pulzo para Servo MecanismosDocument6 paginiContador de Pulzo para Servo Mecanismoscarlosgabriel1971Încă nu există evaluări
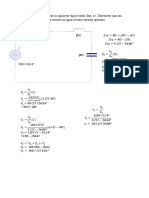
- Por Medio de La Fórmula en Forma Vectorial, Obtenemos:: V 424 Cos (2000 t+30), I 28.3 Cos (2000 t+83.2)Document2 paginiPor Medio de La Fórmula en Forma Vectorial, Obtenemos:: V 424 Cos (2000 t+30), I 28.3 Cos (2000 t+83.2)MupiigÎncă nu există evaluări
- Acopladores de Impedancia TrabajoDocument5 paginiAcopladores de Impedancia TrabajoJuank TorresÎncă nu există evaluări
- Práctica 2Document16 paginiPráctica 2Candido Basilio CruzÎncă nu există evaluări
- Informe 2.10Document12 paginiInforme 2.10Vanessa Monsalve CastroÎncă nu există evaluări
- Normalización ANSIDocument38 paginiNormalización ANSIXavier AlonsoÎncă nu există evaluări
- Modelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFDocument11 paginiModelamiento de Un Sistema de Control de Posición de Un Lanza Misiles PDFLuis AmantaÎncă nu există evaluări
- User Manual SPC-7000-SPANISH Web-0629Document30 paginiUser Manual SPC-7000-SPANISH Web-0629James Jimenez LeonÎncă nu există evaluări
- Tabla Comparativa de Motores para ProyectosDocument2 paginiTabla Comparativa de Motores para ProyectosJuan PerezÎncă nu există evaluări
- Practica PWMDocument9 paginiPractica PWMIvan BalderasÎncă nu există evaluări
- Generador de Funciones 567Document4 paginiGenerador de Funciones 567Rafael RamosÎncă nu există evaluări
- Fuentes Simetricas o DualesDocument2 paginiFuentes Simetricas o DualesMiriam Fiorella Umasi HuamaniÎncă nu există evaluări
- Definiciones de MecanismosDocument7 paginiDefiniciones de MecanismosBetancourt LRÎncă nu există evaluări
- Act 3 U2Document11 paginiAct 3 U2Roberto RomoÎncă nu există evaluări
- Libro Vibraciones Tomo1 FinalDocument179 paginiLibro Vibraciones Tomo1 FinalCarlos Rodrigo Hernández Pérez100% (1)
- Aislamientos de Vibraciones (Proyecto Final)Document13 paginiAislamientos de Vibraciones (Proyecto Final)Gersson AChÎncă nu există evaluări
- Booklet T4 2014Document104 paginiBooklet T4 2014Documentos ImportantesÎncă nu există evaluări
- Guia Placas de MetalDocument13 paginiGuia Placas de MetalConstructores De OrienteÎncă nu există evaluări
- Lean Six SigmaDocument1 paginăLean Six SigmaGersson AChÎncă nu există evaluări
- Tarea Final Diseño de Maquinas Resortes1Document10 paginiTarea Final Diseño de Maquinas Resortes1Gersson AChÎncă nu există evaluări
- Guía para La Elaboración de Tesís Ingeniería USACDocument89 paginiGuía para La Elaboración de Tesís Ingeniería USACGersson AChÎncă nu există evaluări
- Sistemas AmortiguadosDocument2 paginiSistemas AmortiguadosGersson AChÎncă nu există evaluări
- Simulaciones Con MultisimDocument1 paginăSimulaciones Con MultisimGersson AChÎncă nu există evaluări
- Curso de Arrancadores SuavesDocument105 paginiCurso de Arrancadores SuavesJuanma002Încă nu există evaluări
- Ciclo AtkinsonDocument2 paginiCiclo AtkinsonGersson AChÎncă nu există evaluări
- Tarea Final Diseño de Maquinas Resortes1Document10 paginiTarea Final Diseño de Maquinas Resortes1Gersson AChÎncă nu există evaluări
- Libro de Idioma Técnico 1 UsacDocument113 paginiLibro de Idioma Técnico 1 UsacGersson AChÎncă nu există evaluări
- Norma CedenarDocument146 paginiNorma CedenaribaccaÎncă nu există evaluări
- Radiacion Ionizante y No IonizanteDocument11 paginiRadiacion Ionizante y No IonizanteGersson ACh100% (1)
- STEP 7 - Programar Con STEP 7Document532 paginiSTEP 7 - Programar Con STEP 7Juan Carlos HernandezÎncă nu există evaluări
- Proyectos Industriales CEKIT 002Document163 paginiProyectos Industriales CEKIT 002Gersson ACh100% (4)
- Industria Del CementoDocument15 paginiIndustria Del CementoGersson AChÎncă nu există evaluări
- Proyecto Ing - EconomicaDocument9 paginiProyecto Ing - EconomicaGersson AChÎncă nu există evaluări
- Guia para Ensayos de Campo en Equipos Elect. PotenciaDocument49 paginiGuia para Ensayos de Campo en Equipos Elect. PotenciaVladimir Beltrán Sierra100% (2)
- Bomba de CalorDocument12 paginiBomba de CalorGersson AChÎncă nu există evaluări
- Circuitos Electricos 2Document2 paginiCircuitos Electricos 2Gersson AChÎncă nu există evaluări
- Check List - DocumentoDocument4 paginiCheck List - DocumentoJose GMZÎncă nu există evaluări
- 18 Julio 2013Document15 pagini18 Julio 2013LCMDPÎncă nu există evaluări
- El Planeta Marte PDFDocument15 paginiEl Planeta Marte PDFmanuel rosilesÎncă nu există evaluări
- 5 19may Evaluación Diagnostica Comunicación PrimariaDocument57 pagini5 19may Evaluación Diagnostica Comunicación PrimariamarchanthuanÎncă nu există evaluări
- Hito 2 Cirugia Iii P1 - Dr. Heredia 2021Document3 paginiHito 2 Cirugia Iii P1 - Dr. Heredia 2021Adrian CalderonÎncă nu există evaluări
- Ficha Informativa: Estructura Y Función Del Arn, Arnm, Arnr Y ArntDocument4 paginiFicha Informativa: Estructura Y Función Del Arn, Arnm, Arnr Y ArntRuth ApazaÎncă nu există evaluări
- SemióticaDocument4 paginiSemióticaEsther Lu Mendoza P100% (1)
- Laboratorio 5Document21 paginiLaboratorio 5Benny Gomez C0% (1)
- (Ex) Une - 20460 7 710 1998Document5 pagini(Ex) Une - 20460 7 710 1998Karina Elizabeth AyalaÎncă nu există evaluări
- Guia de Nomenclatura de Compuestos InorgánicosDocument13 paginiGuia de Nomenclatura de Compuestos InorgánicosWilmer LopezÎncă nu există evaluări
- Tesis Tajo Raul RojasDocument154 paginiTesis Tajo Raul RojasTHALIA YAJAIRA RIMAC VEGAÎncă nu există evaluări
- El NitrógenoDocument8 paginiEl Nitrógenoelvizito1991Încă nu există evaluări
- GCM-SSMA-PG-11 Investigación de Incidentes, No Conformidades, Acciones Preventivas y CorrectivasDocument17 paginiGCM-SSMA-PG-11 Investigación de Incidentes, No Conformidades, Acciones Preventivas y CorrectivasLoreto Vera BasualtoÎncă nu există evaluări
- HIDROGEOLOGIADocument11 paginiHIDROGEOLOGIASamantha Ramos MartinezÎncă nu există evaluări
- Banco de TransformadoresDocument8 paginiBanco de TransformadoresSamuel SayÎncă nu există evaluări
- Declaracion Jurada RR - SS - Ingeco - Final FinalDocument8 paginiDeclaracion Jurada RR - SS - Ingeco - Final FinalNataly Estefani Zurichaqui MachacaÎncă nu există evaluări
- Anexo - Curriculum Montajes EmeltaDocument38 paginiAnexo - Curriculum Montajes EmeltaOscar Bravo100% (1)
- Micosis Sist HospDocument78 paginiMicosis Sist HospDayanaÎncă nu există evaluări
- AleteiaDocument2 paginiAleteiamatteo bordignonÎncă nu există evaluări
- Metrados de CargasDocument11 paginiMetrados de CargasShirley VasquezÎncă nu există evaluări
- El Tratamiento No Invasivo Denominado CriolipólisisDocument1 paginăEl Tratamiento No Invasivo Denominado CriolipólisisNadia ReineroÎncă nu există evaluări
- Microbiologia Del SueloDocument97 paginiMicrobiologia Del Suelovipol100% (1)
- Tema 7.los Invertebrados 1ºeso Biología y GeologíaDocument3 paginiTema 7.los Invertebrados 1ºeso Biología y GeologíaPaula EstebanÎncă nu există evaluări
- Seminario Actinomicosis - NocardiosisDocument26 paginiSeminario Actinomicosis - NocardiosisElio RenzoÎncă nu există evaluări
- Caracteristicas de La MusicaDocument8 paginiCaracteristicas de La Musicaedirley dayanna perez foreroÎncă nu există evaluări
- Obtencion y Aleaciones Del BronceDocument9 paginiObtencion y Aleaciones Del BronceRodivan GonzalesÎncă nu există evaluări
- 1 CacuDocument26 pagini1 CacuJorge Quispe RodasÎncă nu există evaluări
- MorfofisiologiaDocument13 paginiMorfofisiologia¡Hey Soy Patto100% (2)
- Sena 2Document7 paginiSena 2Javier AndresÎncă nu există evaluări