S-ar putea să vă placă și
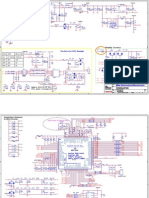
- Circuit Diagram of Projection Welding Machine PDFDocument1 paginăCircuit Diagram of Projection Welding Machine PDFMadhavesh KulkarniÎncă nu există evaluări
- ECO Studio Operation Manual ECOVARIO ECOSTEP 090625 EnglDocument124 paginiECO Studio Operation Manual ECOVARIO ECOSTEP 090625 EnglSorescu Alexandru GabrielÎncă nu există evaluări
- NC Mill SFTWR ManualDocument100 paginiNC Mill SFTWR ManualPham LongÎncă nu există evaluări
- Technical Brief :recommendedDocument1 paginăTechnical Brief :recommendedglens_nwa100% (2)
- Dry Type Transformer PDFDocument2 paginiDry Type Transformer PDFpogisimpatikoÎncă nu există evaluări
- Treinamento STEC-360A (NC Program) E PDFDocument107 paginiTreinamento STEC-360A (NC Program) E PDFArmando Rivera100% (2)
- Configuración UMC 100Document132 paginiConfiguración UMC 100Yrving GutierrezÎncă nu există evaluări
- Axor Drive Service ManualDocument68 paginiAxor Drive Service Manualkratmel100% (2)
- KEB COMBIVERT F5 Instruction ManualDocument12 paginiKEB COMBIVERT F5 Instruction ManualWagner MenezesÎncă nu există evaluări
- M0000528 Inst200 Ing v1.6Document84 paginiM0000528 Inst200 Ing v1.6Farzad SagharchiÎncă nu există evaluări
- KEB Manual F4C PDFDocument282 paginiKEB Manual F4C PDFLeo Dos Ramos100% (1)
- Drive Error List - YaskawaDocument18 paginiDrive Error List - YaskawaKrittaphak Hacheyram79% (14)
- Fall Antec Cat 2010 EN PDFDocument52 paginiFall Antec Cat 2010 EN PDFCristian YañezÎncă nu există evaluări
- DAB 2019 Product CatalogueDocument24 paginiDAB 2019 Product CatalogueTanaka MasochaÎncă nu există evaluări
- Alba SP LIST For DAE 16 & DAE 16 LDocument26 paginiAlba SP LIST For DAE 16 & DAE 16 Ldrmasster100% (3)
- Rotaclip PlanosDocument121 paginiRotaclip PlanosEnrique Martinez RojasÎncă nu există evaluări
- Microwave Trouble Shooting ManualDocument35 paginiMicrowave Trouble Shooting ManualAde NugroxxÎncă nu există evaluări
- 349529-2H Rotary Encoders enDocument107 pagini349529-2H Rotary Encoders enskyÎncă nu există evaluări
- Operador Wittur Hydra Plus: Hidra Plus - Midi / SupraDocument3 paginiOperador Wittur Hydra Plus: Hidra Plus - Midi / SuprasmsobhanÎncă nu există evaluări
- Kenwood TS-440 Repair - OZ1BXMDocument9 paginiKenwood TS-440 Repair - OZ1BXMRui Slva100% (1)
- GT650 S R Parts CatalogueDocument124 paginiGT650 S R Parts CatalogueJuan José Moreno PeñueloÎncă nu există evaluări
- AC Servo Spindle System V3.2Document37 paginiAC Servo Spindle System V3.2Maya MayoshkaÎncă nu există evaluări
- A2100 Iso PDFDocument202 paginiA2100 Iso PDFAmit JholaparaÎncă nu există evaluări
- Delta VFD-B ManualDocument239 paginiDelta VFD-B ManualRay Rosales100% (2)
- KEB TD Combivert F5Document24 paginiKEB TD Combivert F5Dao DoÎncă nu există evaluări
- Braking Unit YaskawaDocument54 paginiBraking Unit Yaskawazoldyck elhieiÎncă nu există evaluări
- Circuito SGB-142Document3 paginiCircuito SGB-142Anderson KrissÎncă nu există evaluări
- BP2866XJ: Non-Isolated Buck Offline LED Driver Description FeaturesDocument2 paginiBP2866XJ: Non-Isolated Buck Offline LED Driver Description FeaturesEo GpÎncă nu există evaluări
- Alimentador Miller 22ADocument36 paginiAlimentador Miller 22ARaul Corona de la Llata100% (1)
- EC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)Document1 paginăEC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)EduRoiÎncă nu există evaluări
- Alpha 900 User Manual Rev9Document4 paginiAlpha 900 User Manual Rev9Fabio Martins100% (1)
- Catalog35 1Document60 paginiCatalog35 1seanstilen100% (1)
- Bench Lathe: Operation ManualDocument14 paginiBench Lathe: Operation ManualEdson Gordiano100% (1)
- Enterprise Plasma 160 HF PDFDocument20 paginiEnterprise Plasma 160 HF PDFсергей васяновичÎncă nu există evaluări
- OTM +1000 Manual 440VDocument1 paginăOTM +1000 Manual 440VhumbertoÎncă nu există evaluări
- Infranor Variable Speed Drive Implementation: UserguideDocument24 paginiInfranor Variable Speed Drive Implementation: UserguideerasmoÎncă nu există evaluări
- TV On DVD-mst720-113Document3 paginiTV On DVD-mst720-113dann2220% (1)
- 1.XENON-Spare Parts ListDocument8 pagini1.XENON-Spare Parts ListFIVE MEDIA SOCIALÎncă nu există evaluări
- TR-3 enDocument1 paginăTR-3 enSaad Saad SaadÎncă nu există evaluări
- Relé Seg - Msi-Sr2f - 2009-02 - En-De-Fr PDFDocument2 paginiRelé Seg - Msi-Sr2f - 2009-02 - En-De-Fr PDFdeividisimionatoÎncă nu există evaluări
- MS2 IpmDocument101 paginiMS2 Ipmgionguyen0% (1)
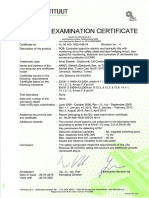
- ARL 300 EU Type Examination Certificate 1Document1 paginăARL 300 EU Type Examination Certificate 1mahfoud ascenseursÎncă nu există evaluări
- 140 Parts Manual (Issue3)Document94 pagini140 Parts Manual (Issue3)ahamed0% (1)
- Sanken Electric Co., LTD.: Instruction Manual (Basic)Document136 paginiSanken Electric Co., LTD.: Instruction Manual (Basic)cavanghiphopÎncă nu există evaluări
- FOR Series 15i: Servo AlarmDocument8 paginiFOR Series 15i: Servo Alarmsanchai2Încă nu există evaluări
- Catalogo TiristorDocument224 paginiCatalogo TiristorPablo Acapulco Guerrero50% (2)
- Bumeks Gear Ford Transit 2018 CatalogDocument3 paginiBumeks Gear Ford Transit 2018 CatalogHeptagon AutomotiveÎncă nu există evaluări
- Nordac Vector MC PDFDocument64 paginiNordac Vector MC PDFTonino08Încă nu există evaluări
- Combivert: Installation Manual Housing EDocument44 paginiCombivert: Installation Manual Housing EVijačni kompresori- Prodaja i servisÎncă nu există evaluări
- Combivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlDocument52 paginiCombivert: Installation Guide & Operation Manual D-Housing 1-5 HP 230V 1 - 10 HP 480V B Control C Control G ControlAhmet KayurÎncă nu există evaluări
- NORDAC Vector MC: Getriebebau NORD ... NORD GearDocument26 paginiNORDAC Vector MC: Getriebebau NORD ... NORD GearjorgeÎncă nu există evaluări
- Manual SK 700EDocument128 paginiManual SK 700EPruetikul WatanachaikulÎncă nu există evaluări
- 4972b en MD2SDocument48 pagini4972b en MD2SGiovanni RotondoÎncă nu există evaluări
- 8600 Frequency Inverters enDocument126 pagini8600 Frequency Inverters enFernando AlmeidaÎncă nu există evaluări
- NORDAC Compact Frequency Inverter: Operating InstructionsDocument38 paginiNORDAC Compact Frequency Inverter: Operating InstructionsNejra DedajićÎncă nu există evaluări
- Nord SK 200E Inverter ManualDocument265 paginiNord SK 200E Inverter ManualStevenÎncă nu există evaluări
- Instrukciya Dynamic LineDocument44 paginiInstrukciya Dynamic LineavazdalibaevÎncă nu există evaluări
- Control de Motor DC PDFDocument48 paginiControl de Motor DC PDFLuis Florian SalasÎncă nu există evaluări
- ABB Technical Guide 3 - EMC Compliant Installation For Power DrivesDocument40 paginiABB Technical Guide 3 - EMC Compliant Installation For Power DrivesASM_213Încă nu există evaluări
- BN0926710101 Manual Ultimo AegDocument50 paginiBN0926710101 Manual Ultimo AegOsmar Marca CondoriÎncă nu există evaluări
- 530 Speed Controllers 1202 enDocument34 pagini530 Speed Controllers 1202 enfnrjbÎncă nu există evaluări
- Simatic FM NCUDocument108 paginiSimatic FM NCUSam eagle goodÎncă nu există evaluări
- Safe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsDe la EverandSafe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsÎncă nu există evaluări
- Synchronous Motors 1FK7: Operating Instructions 03/2011Document58 paginiSynchronous Motors 1FK7: Operating Instructions 03/2011Krittaphak HacheyramÎncă nu există evaluări
- FDS 5000 en From HW 200Document106 paginiFDS 5000 en From HW 200Krittaphak Hacheyram0% (1)
- MK120S Users ManualDocument306 paginiMK120S Users ManualKrittaphak HacheyramÎncă nu există evaluări
- 1s4t2en - 30 9 16 - TPD32 EvDocument502 pagini1s4t2en - 30 9 16 - TPD32 EvKrittaphak Hacheyram100% (1)
- Abb VariadorDocument52 paginiAbb VariadorPa TricioÎncă nu există evaluări
- Cuvc PDFDocument65 paginiCuvc PDFKrittaphak HacheyramÎncă nu există evaluări
- Zowie XL2540 ManualDocument57 paginiZowie XL2540 ManualSergio FaciolaÎncă nu există evaluări
- ZL50CN-maintemance ManuelDocument128 paginiZL50CN-maintemance ManuelHillal Tamsaouete67% (3)
- Keithley 2460 High Current SourceMeter SMU DatasheetDocument15 paginiKeithley 2460 High Current SourceMeter SMU DatasheetJohn CorralesÎncă nu există evaluări
- Narrative Report TransformerDocument6 paginiNarrative Report TransformerMarvin GagarinÎncă nu există evaluări
- 056-092 Best Practices For Wiring Resistive SensorsDocument4 pagini056-092 Best Practices For Wiring Resistive SensorsManuel Estrela Brito Junior100% (2)
- ACSx80 - Comparison TableDocument3 paginiACSx80 - Comparison Tablesorangel_123Încă nu există evaluări
- EpirocDocument8 paginiEpirocAditi DasÎncă nu există evaluări
- Lab 1 Config GPIODocument26 paginiLab 1 Config GPIONguyễn Việt HưngÎncă nu există evaluări
- Rancang Bangun Set Eksperimen Kalorimeter Digital Dengan Pengindera Sensor Termokopel Dan Sensor Load Cell Berbasis Arduino UnoDocument8 paginiRancang Bangun Set Eksperimen Kalorimeter Digital Dengan Pengindera Sensor Termokopel Dan Sensor Load Cell Berbasis Arduino UnoSaskia Fiestika BerlianaÎncă nu există evaluări
- MN000218A01 B Enus MultiUnit Charger PMLN6621 User Guide PDFDocument28 paginiMN000218A01 B Enus MultiUnit Charger PMLN6621 User Guide PDFirwanÎncă nu există evaluări
- MPMC Unit 3Document31 paginiMPMC Unit 3Arvee JiÎncă nu există evaluări
- MCQsDocument3 paginiMCQslovelyosmile253Încă nu există evaluări
- IDT CH: Check VersionDocument66 paginiIDT CH: Check VersionaxxtionÎncă nu există evaluări
- Suspension Trasera Ultimax Camiones KenworthDocument8 paginiSuspension Trasera Ultimax Camiones KenworthLuis Angel Avila BritoÎncă nu există evaluări
- Spipl PSM-550-260417Document4 paginiSpipl PSM-550-260417sunilkrishnamurthy1Încă nu există evaluări
- Toyota SP100 Series Sewing Machine Instruction ManualDocument51 paginiToyota SP100 Series Sewing Machine Instruction ManualiliiexpugnansÎncă nu există evaluări
- Atlantic Version: Applicator Data ODocument4 paginiAtlantic Version: Applicator Data OChung LeÎncă nu există evaluări
- Diagram 2 Data Link ConnectorDocument1 paginăDiagram 2 Data Link ConnectorJoycee Lázaro ReyesÎncă nu există evaluări
- Ont Axle 2 PDFDocument34 paginiOnt Axle 2 PDFFrezgi BirhanuÎncă nu există evaluări
- Micro Programmed ControlDocument24 paginiMicro Programmed Controlapi-26870484100% (8)
- Wound Induction Motor SimulinkDocument9 paginiWound Induction Motor Simulinkjohn georgeÎncă nu există evaluări
- Installation Guide: Flap Barrier Turnstile-FBL Pro SeriesDocument14 paginiInstallation Guide: Flap Barrier Turnstile-FBL Pro SeriesSidney JúniorÎncă nu există evaluări
- T512-5047 Manual PDFDocument20 paginiT512-5047 Manual PDFelectronico1000Încă nu există evaluări
- Service Manual RCA 40LA45RQlDocument45 paginiService Manual RCA 40LA45RQlLuxiano StradaÎncă nu există evaluări
- Watts Radiant Onix Tubing BrochureDocument2 paginiWatts Radiant Onix Tubing Brochuree-ComfortUSAÎncă nu există evaluări
- TriRate SMT Datasheet RevD1Document4 paginiTriRate SMT Datasheet RevD1lgrome73Încă nu există evaluări
- Guia Usuario Controlador Robot YRC Series Omron PDFDocument286 paginiGuia Usuario Controlador Robot YRC Series Omron PDFJose OrtegaÎncă nu există evaluări
- Unit-IV-Induction MotorsDocument57 paginiUnit-IV-Induction MotorssujithÎncă nu există evaluări