S-ar putea să vă placă și
- Itc SlidesDocument107 paginiItc SlidesAnonymous nkyduEvFHrÎncă nu există evaluări
- Neural Coding: Maneesh Sahani Gatsby Computational Neuroscience UnitDocument23 paginiNeural Coding: Maneesh Sahani Gatsby Computational Neuroscience UnitThien LeÎncă nu există evaluări
- Mobile Communications Handbook: Hsu, H.P. "Sampling" Ed. Suthan S. Suthersan Boca Raton: CRC Press LLC, 1999Document12 paginiMobile Communications Handbook: Hsu, H.P. "Sampling" Ed. Suthan S. Suthersan Boca Raton: CRC Press LLC, 1999openid_HsJaS0hjÎncă nu există evaluări
- 9 Pam Isi Channels I 0809 PDFDocument15 pagini9 Pam Isi Channels I 0809 PDFSu KoshÎncă nu există evaluări
- Principles of Communications Lecture 7: Analog Modulation TechniquesDocument31 paginiPrinciples of Communications Lecture 7: Analog Modulation TechniquescyderÎncă nu există evaluări
- Signals Sampling TheoremDocument3 paginiSignals Sampling TheoremDebashis TaraiÎncă nu există evaluări
- Unit-IV-Pulse Modulation & Digital Modulation Modulation: StaffDocument15 paginiUnit-IV-Pulse Modulation & Digital Modulation Modulation: StaffGokul SaharÎncă nu există evaluări
- Topic21 Ideal ReconstructionDocument9 paginiTopic21 Ideal ReconstructionManikanta KrishnamurthyÎncă nu există evaluări
- Topic20 Sampling TheoremDocument6 paginiTopic20 Sampling TheoremManikanta KrishnamurthyÎncă nu există evaluări
- Topic19 Sampling and AliasingDocument5 paginiTopic19 Sampling and AliasingManikanta KrishnamurthyÎncă nu există evaluări
- Introduction to Communication Systems: Baseband Pulse SignalingDocument39 paginiIntroduction to Communication Systems: Baseband Pulse SignalingMihret Assefa100% (1)
- Signals Sampling TheoremDocument3 paginiSignals Sampling TheoremKirubasri SÎncă nu există evaluări
- NotesDocument9 paginiNotesAtharv AryaÎncă nu există evaluări
- Signals Sampling TheoremDocument3 paginiSignals Sampling TheoremBhuvan Susheel MekaÎncă nu există evaluări
- Mobile Radio Propagation: Small-Scale Fading and MultipathDocument68 paginiMobile Radio Propagation: Small-Scale Fading and MultipathAshish BhardwajÎncă nu există evaluări
- Analog Communication Systems IDocument64 paginiAnalog Communication Systems Itadepeace23Încă nu există evaluări
- DSP - Classification of CT SignalsDocument8 paginiDSP - Classification of CT SignalsJunaid KaleemÎncă nu există evaluări
- Modern Approaches to Stochastic Volatility CalibrationDocument43 paginiModern Approaches to Stochastic Volatility Calibrationhsch345Încă nu există evaluări
- Frequency ModulationDocument14 paginiFrequency ModulationKiranKumarÎncă nu există evaluări
- Topic:Signals, Classification of Signals, Basic Signals..: Electrical DepartmentDocument22 paginiTopic:Signals, Classification of Signals, Basic Signals..: Electrical Departmentrajalakshmi boopathiÎncă nu există evaluări
- Chap2 Signal AnalysisDocument20 paginiChap2 Signal AnalysisLaNitah LaNitahÎncă nu există evaluări
- Average and RMS Values of A Periodic Waveform:: T T T T DT T F FDocument4 paginiAverage and RMS Values of A Periodic Waveform:: T T T T DT T F Fdhar_sauravÎncă nu există evaluări
- Notes 08Document16 paginiNotes 08balkyderÎncă nu există evaluări
- Ac Electrical Circuit LabDocument71 paginiAc Electrical Circuit LabtahiaÎncă nu există evaluări
- M-ary Signaling Techniques Optimum ReceiverDocument46 paginiM-ary Signaling Techniques Optimum Receiverkamon20Încă nu există evaluări
- 1 Power Spectral Density (PSD) of Communication Signals: S (T) S T) S T) V (T) eDocument4 pagini1 Power Spectral Density (PSD) of Communication Signals: S (T) S T) S T) V (T) eNaser A SosiyÎncă nu există evaluări
- Note 1470368643Document10 paginiNote 1470368643abhishekÎncă nu există evaluări
- z6 Amplitude ModulationDocument10 paginiz6 Amplitude ModulationtsegayÎncă nu există evaluări
- Telecommunications Engineering Bandpass Modulation Demodulation TechniquesDocument36 paginiTelecommunications Engineering Bandpass Modulation Demodulation TechniquesBasit KhanÎncă nu există evaluări
- Power spectrum of a digital PAM signalDocument2 paginiPower spectrum of a digital PAM signalCode NoobÎncă nu există evaluări
- Analogies between electricity and thermal concepts for inductorsDocument2 paginiAnalogies between electricity and thermal concepts for inductorskosmos3384Încă nu există evaluări
- TP 02: Shannon's Theorem: BjectiveDocument2 paginiTP 02: Shannon's Theorem: Bjectiveឆាម វ៉ាន់នូវÎncă nu există evaluări
- Continuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcDocument17 paginiContinuous Time Signals: Amplitude, Shape, Phase, Frequency, EtcRutu ShuklaÎncă nu există evaluări
- Chapter OneDocument29 paginiChapter Oneلطيف احمد حسنÎncă nu există evaluări
- The Market Model of Interest DynamicsDocument29 paginiThe Market Model of Interest DynamicsGeorge LiuÎncă nu există evaluări
- University of Manchester CS3291: Digital Signal Processing '05-'06 Section 7: Sampling & ReconstructionDocument12 paginiUniversity of Manchester CS3291: Digital Signal Processing '05-'06 Section 7: Sampling & ReconstructionMuhammad Shoaib RabbaniÎncă nu există evaluări
- DSP - Miscellaneous SignalsDocument5 paginiDSP - Miscellaneous SignalsJunaid KaleemÎncă nu există evaluări
- Experiment No. 2Document4 paginiExperiment No. 2ashish pandeyÎncă nu există evaluări
- Finansmatte FSDocument1 paginăFinansmatte FSGustav HägglundÎncă nu există evaluări
- Modulation Part1 PDFDocument30 paginiModulation Part1 PDFعلي بن مختارÎncă nu există evaluări
- Ee4501f18 HW 2Document12 paginiEe4501f18 HW 2al-muntheral-mairikiÎncă nu există evaluări
- Fourier Series of Periodic Continuous-Time SignalsDocument15 paginiFourier Series of Periodic Continuous-Time Signalsprem chandranÎncă nu există evaluări
- The Recent Paper Focussing On The Heart Rate CountsDocument4 paginiThe Recent Paper Focussing On The Heart Rate CountsPJBÎncă nu există evaluări
- D R S SR R T: Cross-Correlation Function, Is Defined by The IntegralDocument13 paginiD R S SR R T: Cross-Correlation Function, Is Defined by The IntegralSulaiman m SaeedÎncă nu există evaluări
- Signals and Systems TutorialDocument62 paginiSignals and Systems TutorialJeterine AriasÎncă nu există evaluări
- Digital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetisDocument27 paginiDigital Communications I: Modulation and Coding Course: Term 3 - 2008 Catharina LogothetiserichaasÎncă nu există evaluări
- 1 S DiscreteDocument34 pagini1 S DiscreteNicolae Adrian VisanÎncă nu există evaluări
- Chapter2 PDFDocument13 paginiChapter2 PDFnur antashaÎncă nu există evaluări
- Basis Representation Fundamentals: Notes by J. RombergDocument28 paginiBasis Representation Fundamentals: Notes by J. RombergAshwani SinghÎncă nu există evaluări
- Exam of Digital Communications 26/06/2013Document2 paginiExam of Digital Communications 26/06/2013pnkc80Încă nu există evaluări
- Digital Communication Systems (ECE4001) : Dr. Thomas JosephDocument100 paginiDigital Communication Systems (ECE4001) : Dr. Thomas JosephWINORLOSEÎncă nu există evaluări
- Signal & Systems-DONEDocument40 paginiSignal & Systems-DONEnavÎncă nu există evaluări
- Change Point Model For Hazard FunctionDocument9 paginiChange Point Model For Hazard FunctionBridge Iit At RanchiÎncă nu există evaluări
- Signals and SystemsDocument23 paginiSignals and SystemsAbdulaziz AbdullahÎncă nu există evaluări
- b3 Angle Modulation - Comm TheoremDocument83 paginib3 Angle Modulation - Comm Theoremhafiz azmanÎncă nu există evaluări
- SECA1301 NotesDocument125 paginiSECA1301 NotesJais S.Încă nu există evaluări
- Angle ModulationDocument22 paginiAngle ModulationManish kumawatÎncă nu există evaluări
- MEEM 3700 Mechanical VibrationsDocument11 paginiMEEM 3700 Mechanical VibrationsMiggy ReyÎncă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)De la EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)Încă nu există evaluări
- Verisity SOCverifyDocument7 paginiVerisity SOCverifysurya75sÎncă nu există evaluări
- Implementation of MACDocument73 paginiImplementation of MACHarshaÎncă nu există evaluări
- 802 11acDocument29 pagini802 11acHarshaÎncă nu există evaluări
- Electric Circuits and Electron DevicesDocument62 paginiElectric Circuits and Electron DevicesHarshaÎncă nu există evaluări
- Data Compression BasicsDocument41 paginiData Compression BasicsHarshaÎncă nu există evaluări
- Image Segmentation Algorithms: - Otsu (1979) - Fisher (1936)Document13 paginiImage Segmentation Algorithms: - Otsu (1979) - Fisher (1936)HarshaÎncă nu există evaluări
- MAC LayerDocument48 paginiMAC LayerHarshaÎncă nu există evaluări
- Intro 80211 AcDocument10 paginiIntro 80211 AcHarshaÎncă nu există evaluări
- Emf NotesDocument79 paginiEmf NotesTaimur Musharraf60% (5)
- IEEE 802.11 Wireless LAN: Draft StandardDocument23 paginiIEEE 802.11 Wireless LAN: Draft Standardswapankumar62Încă nu există evaluări
- Edge DetectionDocument36 paginiEdge DetectionHarshaÎncă nu există evaluări
- Antenna System in Cellular Mobile CommunicationDocument50 paginiAntenna System in Cellular Mobile Communicationbilalkhan107Încă nu există evaluări
- UDPDocument47 paginiUDPHarshaÎncă nu există evaluări
- Internet ProtocolDocument45 paginiInternet ProtocolHarshaÎncă nu există evaluări
- Mobile CommunicationsDocument49 paginiMobile CommunicationsHarsha100% (1)
- Gunn Diodes Application Note: TEOS, Cavity Design, Noise & StabilityDocument4 paginiGunn Diodes Application Note: TEOS, Cavity Design, Noise & StabilityAr-Jay O PanoyÎncă nu există evaluări
- Serial Comm in 8051Document21 paginiSerial Comm in 8051HarshaÎncă nu există evaluări
- X Band OscillatorDocument6 paginiX Band OscillatorHarshaÎncă nu există evaluări
- 11 Gunn DiodesDocument29 pagini11 Gunn DiodesHarshaÎncă nu există evaluări
- 8051 Timer and CounterDocument18 pagini8051 Timer and CounterHarshaÎncă nu există evaluări
- ARM Instruction SetDocument9 paginiARM Instruction SetHarshaÎncă nu există evaluări
- Real Time Operating SystemsDocument44 paginiReal Time Operating SystemsAnand PatraÎncă nu există evaluări
- 8051 Core SpecificationDocument55 pagini8051 Core SpecificationHarshaÎncă nu există evaluări
- Microprocessors and MicrocontrollersDocument25 paginiMicroprocessors and Microcontrollersengwisam2020Încă nu există evaluări
- Access To The Shared Medium: - Different Topologies - Different Multiplexing SchemesDocument23 paginiAccess To The Shared Medium: - Different Topologies - Different Multiplexing Schemes23wingsÎncă nu există evaluări
- Linear ConvolutionDocument16 paginiLinear ConvolutionHarshaÎncă nu există evaluări
- Thumb Instruction SetDocument30 paginiThumb Instruction SetHarshaÎncă nu există evaluări
- Linear Convolution Program in C Language Using CCStudioDocument3 paginiLinear Convolution Program in C Language Using CCStudioHarshaÎncă nu există evaluări
- Congestion ControlDocument32 paginiCongestion ControlSachita Nand MishraÎncă nu există evaluări
- Network LayerDocument49 paginiNetwork LayerHarshaÎncă nu există evaluări
- Technische Unterlagen PVG 32 EnglischDocument76 paginiTechnische Unterlagen PVG 32 EnglischDarÎncă nu există evaluări
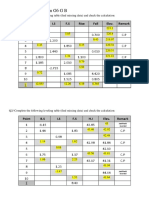
- Salih Samer Muhyiddin G6 G B: Point B.S I.S F.S Rise Fall Elev. RemarkDocument1 paginăSalih Samer Muhyiddin G6 G B: Point B.S I.S F.S Rise Fall Elev. RemarkSalih MohayaddinÎncă nu există evaluări
- Troubleshooting High CPU On 6500 With Sup 720Document28 paginiTroubleshooting High CPU On 6500 With Sup 720Kiran DhurjatyÎncă nu există evaluări
- Design, Analysis and Manufacturing of A Central Low Vacuum SystemDocument55 paginiDesign, Analysis and Manufacturing of A Central Low Vacuum SystemGunabalan SellanÎncă nu există evaluări
- O&M Manual - GL314F3Document224 paginiO&M Manual - GL314F3frank_538254342100% (2)
- Arduino-Based Underground Cable Fault Detection SystemDocument6 paginiArduino-Based Underground Cable Fault Detection SystemscribsunilÎncă nu există evaluări
- BMW Price List September 2009 116i 118iDocument6 paginiBMW Price List September 2009 116i 118iStanislausÎncă nu există evaluări
- Manual Sps 4001b Single Probe Autocalibration Sequencer Rosemount en 1127750Document70 paginiManual Sps 4001b Single Probe Autocalibration Sequencer Rosemount en 1127750cocot 666Încă nu există evaluări
- Chapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryDocument33 paginiChapter 7 Terrestrial Photogrammetry Chapter 8 Digital PhotogrammetryKarungi AroneÎncă nu există evaluări
- Installation Manual Series EZ 305: Auxiliary ModuleDocument6 paginiInstallation Manual Series EZ 305: Auxiliary Modulemehdi810Încă nu există evaluări
- EventDocument19 paginiEventSamriti JainÎncă nu există evaluări
- Chemis Chap 4 (f4)Document2 paginiChemis Chap 4 (f4)Kai YuanÎncă nu există evaluări
- Cse 320Document19 paginiCse 320Ayush BaiswarÎncă nu există evaluări
- Express Alignment: by FixturlaserDocument16 paginiExpress Alignment: by FixturlaserVishal DesaiÎncă nu există evaluări
- CAN connection VIC-2 electronic unitDocument3 paginiCAN connection VIC-2 electronic unitVincent PriceÎncă nu există evaluări
- Ds1307 Application NoteDocument17 paginiDs1307 Application NoteShamsunder31Încă nu există evaluări
- Introduction To Control Systems Introduction To Control SystemsDocument54 paginiIntroduction To Control Systems Introduction To Control SystemsKhoa PhamÎncă nu există evaluări
- Info Iec60354 (Ed2.0) en D.img PDFDocument5 paginiInfo Iec60354 (Ed2.0) en D.img PDFachmad fauzanÎncă nu există evaluări
- Door AccessDocument2 paginiDoor AccessMohd Naim Bin KaramaÎncă nu există evaluări
- Prok ManualDocument8 paginiProk ManualaymaanfkÎncă nu există evaluări
- Schematic Arduino NANO-V3-CH340G ATMEGA328PDocument1 paginăSchematic Arduino NANO-V3-CH340G ATMEGA328PDinung100% (4)
- Vox AC30 Topboost - Reasons & OriginsDocument4 paginiVox AC30 Topboost - Reasons & OriginsMehere AthomeÎncă nu există evaluări
- Atari VCS 2600 Pitfall Labeled Source Assembler CodeDocument59 paginiAtari VCS 2600 Pitfall Labeled Source Assembler CodeAlainleGuirec100% (1)
- ACR Nauticast™ AIS: The Science of SurvivalDocument8 paginiACR Nauticast™ AIS: The Science of Survivalsrinu1984Încă nu există evaluări
- Guide - UniGear - EN-1VLM000005 Rev.4-2005.6.29Document111 paginiGuide - UniGear - EN-1VLM000005 Rev.4-2005.6.2964107955Încă nu există evaluări
- 104.1 Exp5 LabreportDocument3 pagini104.1 Exp5 LabreportreginepetalloÎncă nu există evaluări
- Satellite T110/T130 Series Resource Guide: RG 5.375 X 8.375 Ver 2.3.3Document52 paginiSatellite T110/T130 Series Resource Guide: RG 5.375 X 8.375 Ver 2.3.3Makhfudz KamaediÎncă nu există evaluări
- Optical CommunicationDocument3 paginiOptical CommunicationKrishan PandyaÎncă nu există evaluări
- Welcome to the ECE DepartmentDocument19 paginiWelcome to the ECE DepartmentECE HOD AmalapuramÎncă nu există evaluări
- PrayerDocument11 paginiPrayerJayson AttabanÎncă nu există evaluări