S-ar putea să vă placă și
- PIC18F46J50 ErrataDocument12 paginiPIC18F46J50 Erratafrank_grimesÎncă nu există evaluări
- PIC18F46J50Document562 paginiPIC18F46J50frank_grimesÎncă nu există evaluări
- Accurate TMR0 InterruptsDocument6 paginiAccurate TMR0 Interruptsfrank_grimesÎncă nu există evaluări
- How To Recalibrate A PICDocument3 paginiHow To Recalibrate A PICfrank_grimesÎncă nu există evaluări
- Assignment 1Document6 paginiAssignment 1frank_grimesÎncă nu există evaluări
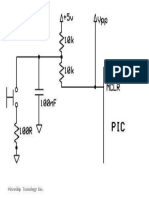
- MCLR Reset CircuitDocument1 paginăMCLR Reset Circuitfrank_grimesÎncă nu există evaluări
- HD44780Document60 paginiHD44780nzltfÎncă nu există evaluări
- Pic 16 F 877 ADocument688 paginiPic 16 F 877 ApvylaleÎncă nu există evaluări
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Document1 paginăPassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesÎncă nu există evaluări
- 01028BDocument10 pagini01028Bjohn100% (1)
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Document3 pagini2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesÎncă nu există evaluări
- Lecture 1 - Manufacturing Process and Process ControlDocument8 paginiLecture 1 - Manufacturing Process and Process Controlfrank_grimesÎncă nu există evaluări
- PICDocument46 paginiPICNguyen Minh TuÎncă nu există evaluări
- Stepping Motors FundamentalsDocument22 paginiStepping Motors Fundamentalsvishnukarthick108Încă nu există evaluări
- Receptor Infrarrojo Tsop382Document7 paginiReceptor Infrarrojo Tsop382frank_grimesÎncă nu există evaluări
- Lecture 2 PDFDocument56 paginiLecture 2 PDFfrank_grimesÎncă nu există evaluări
- Introduction to V-REP Robot Simulator for Matlab/Octave ExercisesDocument5 paginiIntroduction to V-REP Robot Simulator for Matlab/Octave Exercisesfrank_grimesÎncă nu există evaluări
- Useful physics constants and formulasDocument1 paginăUseful physics constants and formulasMensajes De Texto GratisÎncă nu există evaluări
- B BKZ Hyd Il 2 CDocument12 paginiB BKZ Hyd Il 2 Cfrank_grimesÎncă nu există evaluări
- Memoria Flash SST25VF032BDocument33 paginiMemoria Flash SST25VF032Bfrank_grimesÎncă nu există evaluări
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocument27 paginiUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesÎncă nu există evaluări
- Garnet2.0: Detailed On-Chip Network Model Inside Full-System SimulatorDocument42 paginiGarnet2.0: Detailed On-Chip Network Model Inside Full-System Simulatorfrank_grimesÎncă nu există evaluări
- DSDocument18 paginiDSrojo_32100% (1)
- Booksim 2.0 User'S GuideDocument10 paginiBooksim 2.0 User'S GuideSourav SatpathyÎncă nu există evaluări
- B BKZ Hyd Il 2 CDocument12 paginiB BKZ Hyd Il 2 Cfrank_grimesÎncă nu există evaluări
- MITRES 18 007 Parti Lec01 PDFDocument15 paginiMITRES 18 007 Parti Lec01 PDFfrank_grimesÎncă nu există evaluări
- Open Collector Outputs - Signet Sensors PDFDocument4 paginiOpen Collector Outputs - Signet Sensors PDFfrank_grimesÎncă nu există evaluări
- Structure: Study Guide Block 1:vector ArithmeticDocument6 paginiStructure: Study Guide Block 1:vector Arithmeticfrank_grimesÎncă nu există evaluări
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocument12 paginiMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesÎncă nu există evaluări
- B BKZ Hyd Il 2 CDocument12 paginiB BKZ Hyd Il 2 Cfrank_grimesÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5782)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Fire Pump Performance Test Results TemplateDocument2 paginiFire Pump Performance Test Results TemplateATAIYERO ADEKUNLEÎncă nu există evaluări
- CMT overturns the received doctrine on joining steel to aluminiumDocument2 paginiCMT overturns the received doctrine on joining steel to aluminiumvonipkoÎncă nu există evaluări
- SM SAA6D170E-5.pdf-68-79 PDFDocument12 paginiSM SAA6D170E-5.pdf-68-79 PDFBalikpapan CityÎncă nu există evaluări
- Turbocharger and Supercharger ReportDocument18 paginiTurbocharger and Supercharger ReportMayank Burman100% (3)
- First and Second Law Analysis of Future Aircraft Engines: Tomas GR Onstedt Mohammad Irannezhad Xu Lei Oskar ThulinDocument10 paginiFirst and Second Law Analysis of Future Aircraft Engines: Tomas GR Onstedt Mohammad Irannezhad Xu Lei Oskar ThulinAldi RezalÎncă nu există evaluări
- Technical Databook 3E 3ES r2-2Document87 paginiTechnical Databook 3E 3ES r2-2EUROTANK MARITIMEÎncă nu există evaluări
- Fabrication ProcessDocument5 paginiFabrication ProcessKashan Aamir Aamir IshaqÎncă nu există evaluări
- Rotating Stall in Centrifugal CompressorDocument7 paginiRotating Stall in Centrifugal CompressorDennis Ygbuhay100% (1)
- Tutorial 2Document2 paginiTutorial 2Prashanth Shyamala0% (1)
- F32 Technical Repair ManualDocument131 paginiF32 Technical Repair ManualAndres Sorin100% (2)
- Losses in Pipe BendsDocument5 paginiLosses in Pipe BendsLove KumarÎncă nu există evaluări
- Maquina Principal 710 Despiece PDFDocument156 paginiMaquina Principal 710 Despiece PDFAlejandro Rivera Villa100% (2)
- Hardness ComparisonDocument4 paginiHardness Comparisonvendi supendiÎncă nu există evaluări
- SER STR No Mark No FLOW TYPE ITEMS NO. Qty. Unit Wt Tot Wt COMMENTS MATING STRUCTURE R F PaintDocument2 paginiSER STR No Mark No FLOW TYPE ITEMS NO. Qty. Unit Wt Tot Wt COMMENTS MATING STRUCTURE R F PaintkhsaeedÎncă nu există evaluări
- 26-Spirax Sarco Tech 1.PppDocument1 pagină26-Spirax Sarco Tech 1.PppFarah OmarÎncă nu există evaluări
- B-08 Roll Groove For ISO6182-12 Table 1 pipe-RevFDocument1 paginăB-08 Roll Groove For ISO6182-12 Table 1 pipe-RevFDeives de Paula100% (1)
- 07-01 TroubleshootingDocument33 pagini07-01 TroubleshootingVinod GuptaÎncă nu există evaluări
- Example: Boiler Water Level Control SystemDocument3 paginiExample: Boiler Water Level Control SystemDwi Cahyanti PutriÎncă nu există evaluări
- Service Manual Multifuncional Sharp AL-1655CSDocument40 paginiService Manual Multifuncional Sharp AL-1655CSlaqr100% (1)
- Temperature-Accelerated Strength Development in Stabilized Marine Soils As Road Construction MaterialsDocument13 paginiTemperature-Accelerated Strength Development in Stabilized Marine Soils As Road Construction MaterialsHocine HocineÎncă nu există evaluări
- C70SS-C90SDR PLC Complete Manual PDFDocument290 paginiC70SS-C90SDR PLC Complete Manual PDFthuanÎncă nu există evaluări
- Be Main Project 19 FinalDocument75 paginiBe Main Project 19 Finaljuned shaikhÎncă nu există evaluări
- Analysis of A Turbojet With GasTurb 12Document23 paginiAnalysis of A Turbojet With GasTurb 12pagonde83Încă nu există evaluări
- True Stress-True Strain Models For Structural SteeDocument12 paginiTrue Stress-True Strain Models For Structural SteejulianobiancoÎncă nu există evaluări
- Engine parts list under 40 charsDocument4 paginiEngine parts list under 40 charsCharlie Leema100% (1)
- Hydraulic Mining Excavator CAT 6040: Matthias Aust - 2013Document11 paginiHydraulic Mining Excavator CAT 6040: Matthias Aust - 2013----Încă nu există evaluări
- Smith Fibercast Silver Streak Fiberglass Pipe Piping General SpecificationsDocument2 paginiSmith Fibercast Silver Streak Fiberglass Pipe Piping General SpecificationsMichael J. BaneÎncă nu există evaluări
- Series F127WDocument2 paginiSeries F127WWattsÎncă nu există evaluări
- COMPACT RIG HK80CK SOLUTIONDocument2 paginiCOMPACT RIG HK80CK SOLUTIONuri0% (1)
- LRB Non-LinearDocument24 paginiLRB Non-LinearJames McguireÎncă nu există evaluări