S-ar putea să vă placă și
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Basic Computer ConceptsDocument77 paginiBasic Computer ConceptsJerry Mugambi100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- HTML Project RestaurantDocument8 paginiHTML Project RestaurantSandeep Chowdary0% (1)
- SANY SSR180C 8 OM EN PreviewDocument31 paginiSANY SSR180C 8 OM EN Previewzaploc.admÎncă nu există evaluări
- 12 Fa02Document4 pagini12 Fa02corsovaÎncă nu există evaluări
- A Deep Learning Approach For Detecting Stroke From Brain CT Images Using OznetDocument16 paginiA Deep Learning Approach For Detecting Stroke From Brain CT Images Using OznetSreedhar NagavellyÎncă nu există evaluări
- Embedded C and RTOS Unit 1 and 2Document59 paginiEmbedded C and RTOS Unit 1 and 2Sreedhar NagavellyÎncă nu există evaluări
- Research Article: A Robust Channel Estimation Scheme For 5G Massive MIMO SystemsDocument9 paginiResearch Article: A Robust Channel Estimation Scheme For 5G Massive MIMO SystemsSreedhar NagavellyÎncă nu există evaluări
- VIDOSAT: High-Dimensional Sparsifying Transform Learning For Online Video DenoisingDocument13 paginiVIDOSAT: High-Dimensional Sparsifying Transform Learning For Online Video DenoisingSreedhar NagavellyÎncă nu există evaluări
- A Survey On Crop Prediction Using Machine Learning ApproachDocument4 paginiA Survey On Crop Prediction Using Machine Learning ApproachKOLLIPALLI HARIPRASADÎncă nu există evaluări
- Comparative Study of Scheduling Algorithms For Real Time EnvironmentDocument4 paginiComparative Study of Scheduling Algorithms For Real Time EnvironmentSreedhar NagavellyÎncă nu există evaluări
- Cropthesis PDFDocument67 paginiCropthesis PDFSreedhar Nagavelly0% (1)
- Crop Prediction Using Machine Learning: N.L. Chourasiya, P. Modi, N. Shaikh, D. Khandagale, S. PawarDocument5 paginiCrop Prediction Using Machine Learning: N.L. Chourasiya, P. Modi, N. Shaikh, D. Khandagale, S. PawarSreedhar NagavellyÎncă nu există evaluări
- SSP Paper PDFDocument4 paginiSSP Paper PDFSreedhar NagavellyÎncă nu există evaluări
- Segment at I On JournalDocument13 paginiSegment at I On JournalSreedhar NagavellyÎncă nu există evaluări
- Ijcse10 02 08 050Document6 paginiIjcse10 02 08 050Preetiranjan PradhanÎncă nu există evaluări
- Improvement of Grid-Connected Photovoltaic System Using Artificial Neural Network and Genetic Algorithm Under Different ConditionDocument18 paginiImprovement of Grid-Connected Photovoltaic System Using Artificial Neural Network and Genetic Algorithm Under Different ConditionijscmcÎncă nu există evaluări
- 2a8 0724 PDFDocument4 pagini2a8 0724 PDFSreedhar NagavellyÎncă nu există evaluări
- V3i4 Ijertv3is041519 PDFDocument5 paginiV3i4 Ijertv3is041519 PDFSreedhar NagavellyÎncă nu există evaluări
- Multiuser Mimo Techniques With Imperfect Channel InformationDocument1 paginăMultiuser Mimo Techniques With Imperfect Channel InformationSreedhar NagavellyÎncă nu există evaluări
- Ijece V2i4p101 PDFDocument5 paginiIjece V2i4p101 PDFSreedhar NagavellyÎncă nu există evaluări
- GSM Based Home Automation System ApplicationDocument8 paginiGSM Based Home Automation System Applicationddarunk1989373Încă nu există evaluări
- MEMS Sensors: Examples of Application: Richard BaloghDocument21 paginiMEMS Sensors: Examples of Application: Richard Baloghbchaitanya09Încă nu există evaluări
- FlowCon General InstructionDocument4 paginiFlowCon General InstructionGabriel Arriagada UsachÎncă nu există evaluări
- Qcs 2010 Section 5 Part 8 Transportation and Placing of ConcreteDocument7 paginiQcs 2010 Section 5 Part 8 Transportation and Placing of Concretebryanpastor106Încă nu există evaluări
- POSSIBILITIES OF LOW VOLTAGE DC SYSTEMSDocument10 paginiPOSSIBILITIES OF LOW VOLTAGE DC SYSTEMSTTaanÎncă nu există evaluări
- حل جميع المعادلات الكهربائيةDocument60 paginiحل جميع المعادلات الكهربائيةGandhi HammoudÎncă nu există evaluări
- OD Main Switch & OD OFF Indicator Light CircuitDocument4 paginiOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoÎncă nu există evaluări
- The hyperwall: A multiple display wall for visualizing high-dimensional dataDocument4 paginiThe hyperwall: A multiple display wall for visualizing high-dimensional dataMahendra PututÎncă nu există evaluări
- MPTK Medium Pressure Pump Performance SpecsDocument2 paginiMPTK Medium Pressure Pump Performance SpecssaronandyÎncă nu există evaluări
- Royal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale QuotationDocument3 paginiRoyal 3KW Solar System: Ref: RSE/SQ/804/2020 Date: 09-28-2020 Sale Quotationmuhammad aliÎncă nu există evaluări
- Template Icme 13 PosterDocument1 paginăTemplate Icme 13 PosterZulma Xiomara Rueda GarciaÎncă nu există evaluări
- A Polypropylene Film With Excellent Clarity Combined With Avery Dennison Clearcut™ Adhesive Technology and With A Glassine LinerDocument4 paginiA Polypropylene Film With Excellent Clarity Combined With Avery Dennison Clearcut™ Adhesive Technology and With A Glassine LinerAhmad HaririÎncă nu există evaluări
- Numerical Ability - Data Interpretation 3: 25 QuestionsDocument6 paginiNumerical Ability - Data Interpretation 3: 25 QuestionsAvishek01Încă nu există evaluări
- DSSSB 01 2017Document9 paginiDSSSB 01 2017Praneeta KatdareÎncă nu există evaluări
- The Five Generations of Computers: AssignmentDocument10 paginiThe Five Generations of Computers: Assignmentjismon_kjÎncă nu există evaluări
- Strategic Information Systems Planning: Course OverviewDocument18 paginiStrategic Information Systems Planning: Course OverviewEmmy W. RosyidiÎncă nu există evaluări
- Touch Screen TechnologyDocument18 paginiTouch Screen TechnologySmîlērÎncă nu există evaluări
- PMO ProceduresDocument21 paginiPMO ProceduresTariq JamalÎncă nu există evaluări
- SPW3 Manual Rev 5Document713 paginiSPW3 Manual Rev 5JPYadavÎncă nu există evaluări
- I) CentrifugesDocument46 paginiI) Centrifugesiahim87Încă nu există evaluări
- Study of Step Up & Step Down Transformer: Experiment 9Document3 paginiStudy of Step Up & Step Down Transformer: Experiment 9Apna VeerÎncă nu există evaluări
- Current Developments in Lens DesignDocument12 paginiCurrent Developments in Lens DesignMahabub HossainÎncă nu există evaluări
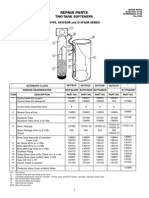
- Star S07FS32DR Water Softener Repair PartsDocument1 paginăStar S07FS32DR Water Softener Repair PartsBillÎncă nu există evaluări
- Vijay Kumar Gupta (OILER)Document1 paginăVijay Kumar Gupta (OILER)VIJAY GUPTAÎncă nu există evaluări
- GestioIP 3.0 Installation GuideDocument17 paginiGestioIP 3.0 Installation GuidepiterasÎncă nu există evaluări
- Software Hardware Tech x86 VirtDocument9 paginiSoftware Hardware Tech x86 VirtwyfwongÎncă nu există evaluări
- Load-Modulated Arrays Emerging MIMO TechnologyDocument83 paginiLoad-Modulated Arrays Emerging MIMO TechnologysmkraliÎncă nu există evaluări
- Ranking 4Document34 paginiRanking 4Deepti BhatiaÎncă nu există evaluări