S-ar putea să vă placă și
- P5 CoronelDocument6 paginiP5 CoronelWilly SebastianÎncă nu există evaluări
- Laplace PDFDocument2 paginiLaplace PDFharry_gomez18Încă nu există evaluări
- Preparatorio 7Document6 paginiPreparatorio 7Willy SebastianÎncă nu există evaluări
- AvrDocument387 paginiAvrEddie Marin100% (4)
- Taller FinalDocument1 paginăTaller FinalWilly SebastianÎncă nu există evaluări
- Examen Final Dispositivos ElectronicosDocument1 paginăExamen Final Dispositivos ElectronicosWilly SebastianÎncă nu există evaluări
- Preguntas Higiene-Industrial SISODocument6 paginiPreguntas Higiene-Industrial SISOWilly SebastianÎncă nu există evaluări
- Escuela Politécnica Nacional: Sistemas de Control DiscretoDocument1 paginăEscuela Politécnica Nacional: Sistemas de Control DiscretoWilly SebastianÎncă nu există evaluări
- Intro SimulinkDocument122 paginiIntro SimulinkPablo CepedaÎncă nu există evaluări
- D2 SCD 2017a PDFDocument1 paginăD2 SCD 2017a PDFWilly SebastianÎncă nu există evaluări
- Analisis de Seguridad Estatica y DinamicaDocument56 paginiAnalisis de Seguridad Estatica y DinamicaWilly SebastianÎncă nu există evaluări
- Preparatorio 10Document2 paginiPreparatorio 10Willy SebastianÎncă nu există evaluări
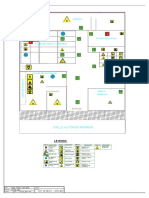
- Mapa de Riesgos Coronel WillyDocument1 paginăMapa de Riesgos Coronel WillyWilly SebastianÎncă nu există evaluări
- P 10Document9 paginiP 10Willy SebastianÎncă nu există evaluări
- Planta de GasDocument10 paginiPlanta de GasWilly SebastianÎncă nu există evaluări
- Trabajo SintonizacionDocument2 paginiTrabajo SintonizacionGabrielaÎncă nu există evaluări
- Parte1 Aula VirtualDocument34 paginiParte1 Aula VirtualWilly SebastianÎncă nu există evaluări
- IntroducciónDocument17 paginiIntroducciónWilly SebastianÎncă nu există evaluări
- Redes de Área LocalDocument7 paginiRedes de Área LocalWilly SebastianÎncă nu există evaluări
- Comunicaion USART AsincronicaDocument2 paginiComunicaion USART AsincronicaWilly SebastianÎncă nu există evaluări
- Simulacion Control Escalar y Vectorial para Maquinas AsincronasDocument4 paginiSimulacion Control Escalar y Vectorial para Maquinas AsincronasWilly SebastianÎncă nu există evaluări
- 2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasDocument3 pagini2018A - P10. Operacion en 4 Cuadrantes de Maquinas ElectricasStalin MuelaÎncă nu există evaluări
- Control de Maquinas Iee853 - Semestre 2015b - Ver16Document579 paginiControl de Maquinas Iee853 - Semestre 2015b - Ver16Willy SebastianÎncă nu există evaluări
- Enlace CovalenteDocument31 paginiEnlace Covalentehenry2392100% (5)
- TallerDocument2 paginiTallerWilly SebastianÎncă nu există evaluări
- Flujo de Cargas Difuso PDFDocument47 paginiFlujo de Cargas Difuso PDFWilly SebastianÎncă nu există evaluări
- Terminos Electricos y de FacturacionDocument14 paginiTerminos Electricos y de FacturaciongonzaloÎncă nu există evaluări
- DeberDocument1 paginăDeberWilly SebastianÎncă nu există evaluări
- Gauss Jordán y KramerDocument3 paginiGauss Jordán y KramerAlexoÎncă nu există evaluări
- Sustentacion Trabajo Colaborativo - Escenario 7 - Primer Bloque-Ciencias Basicas - Calculo II - (Grupo b03)Document5 paginiSustentacion Trabajo Colaborativo - Escenario 7 - Primer Bloque-Ciencias Basicas - Calculo II - (Grupo b03)YAMILE ALMARIOÎncă nu există evaluări
- S01.s1 Material 1 PDFDocument19 paginiS01.s1 Material 1 PDFalexÎncă nu există evaluări
- Taller 1 MatricesDocument2 paginiTaller 1 MatricesIRKHAN DUQUEÎncă nu există evaluări
- ISIS1105 01 Verificacion Mateo-MergedDocument43 paginiISIS1105 01 Verificacion Mateo-MergedJonathan RiveraÎncă nu există evaluări
- Examen Final EconometriaDocument43 paginiExamen Final EconometriaSebastian CamachoÎncă nu există evaluări
- Ejercicio Tema 2 - Resolución de Problemas en Pseudocódigo y Diagramas de FlujoDocument16 paginiEjercicio Tema 2 - Resolución de Problemas en Pseudocódigo y Diagramas de FlujoALISSON XIOMARA JACINTO ESCALANTEÎncă nu există evaluări
- Primer Examen Parcial ING IND G1 AL CECAR PDFDocument2 paginiPrimer Examen Parcial ING IND G1 AL CECAR PDFLaura DiazÎncă nu există evaluări
- UBA - Econ.ANum - SENoLDocument23 paginiUBA - Econ.ANum - SENoLVerónica del RíoÎncă nu există evaluări
- Psicometría SimulacroDocument3 paginiPsicometría Simulacroeva darestÎncă nu există evaluări
- Programa Curso 2018-02Document2 paginiPrograma Curso 2018-02JairoRoseroÎncă nu există evaluări
- Arbol Exp MinimaDocument9 paginiArbol Exp MinimaRodrigoÎncă nu există evaluări
- Análisis de DecisiónDocument42 paginiAnálisis de DecisiónJose Fernando VasquezÎncă nu există evaluări
- Trabajo Criptografia CompatibleDocument15 paginiTrabajo Criptografia CompatiblePascual OnofreÎncă nu există evaluări
- Ensayo Clasificacion de Los Algoritmos y Sus CaracteristicasDocument6 paginiEnsayo Clasificacion de Los Algoritmos y Sus Caracteristicascristal taverasÎncă nu există evaluări
- Programacion Genetica para El Diseño de Circuitos LogicosDocument6 paginiProgramacion Genetica para El Diseño de Circuitos LogicosPaty ZenÎncă nu există evaluări
- 5 EIN6017 C6 Laboratorio Interactivo 10Document4 pagini5 EIN6017 C6 Laboratorio Interactivo 10Jaime DiazÎncă nu există evaluări
- Metodos Heuristicos y MetaheuristicosDocument21 paginiMetodos Heuristicos y Metaheuristicosjuancarrillod9198Încă nu există evaluări
- Modelo de Inventario MultiperiodoDocument4 paginiModelo de Inventario MultiperiodoJULIANA ANGELÎncă nu există evaluări
- Ejercicios FraDocument29 paginiEjercicios FraCristopher Antonio Valenzuela CuevasÎncă nu există evaluări
- Specific HeatDocument2 paginiSpecific HeatSebastian Costa100% (1)
- Tarea 3 - Wendy RinconDocument15 paginiTarea 3 - Wendy RinconLiliana Ortiz CavanzoÎncă nu există evaluări
- EstadisticaDocument13 paginiEstadisticaaaron bautistaÎncă nu există evaluări
- Análisis de Datos CategóricosDocument37 paginiAnálisis de Datos CategóricosPedro Andrés PupialesÎncă nu există evaluări
- Mapa MentalDocument1 paginăMapa MentalSilena RojasÎncă nu există evaluări
- Ejercicios ProcesosEstocásticosDocument2 paginiEjercicios ProcesosEstocásticosEdwiinOrtizZÎncă nu există evaluări
- 1ero - LenguajeDocument8 pagini1ero - LenguajeValladares Yovera EverÎncă nu există evaluări
- Algoritmo para El Calculo de Areas y VolumenesDocument7 paginiAlgoritmo para El Calculo de Areas y VolumenesNyroher de ChamorroÎncă nu există evaluări
- Foro 1 Iop1Document12 paginiForo 1 Iop1Jesus Ocaña RamirezÎncă nu există evaluări
- Práctica 5 - Regresión Lineal MúltipleDocument8 paginiPráctica 5 - Regresión Lineal MúltipleAngel Moises BonillaÎncă nu există evaluări