S-ar putea să vă placă și
- Drive DC Reliance MaxPack - Plus PDFDocument59 paginiDrive DC Reliance MaxPack - Plus PDFJuan David Ardila TorresÎncă nu există evaluări
- Practical Guide To Free-Energy DevicesDocument6 paginiPractical Guide To Free-Energy Devicesoveryounity100% (2)
- Remstar Pro 2 and AutoDocument106 paginiRemstar Pro 2 and AutoJohn E FosterÎncă nu există evaluări
- Automatic Object Sorting Machine: International Research Journal of Engineering and Technology (IRJET)Document6 paginiAutomatic Object Sorting Machine: International Research Journal of Engineering and Technology (IRJET)Umar FarouqÎncă nu există evaluări
- Colorimeter PDFDocument9 paginiColorimeter PDFEnrique VidalÎncă nu există evaluări
- OMRDocument7 paginiOMRgetinetÎncă nu există evaluări
- Rfid BunDocument7 paginiRfid BunSimona NicoletaÎncă nu există evaluări
- Frictionless Bearing TSDocument16 paginiFrictionless Bearing TS4MH18CS086 Rakesh Mallika SÎncă nu există evaluări
- Detection and Notification of Potholes and Humps On Roads: IjarcceDocument4 paginiDetection and Notification of Potholes and Humps On Roads: IjarcceDeepak DasÎncă nu există evaluări
- ETCW31Document5 paginiETCW31Editor IJAERDÎncă nu există evaluări
- Low Cost AvDocument5 paginiLow Cost AvrahulsundaresanÎncă nu există evaluări
- Automatic Work Piece Inspection Cum Counter ConveyorDocument10 paginiAutomatic Work Piece Inspection Cum Counter ConveyorIJRASETPublicationsÎncă nu există evaluări
- Book Reviews: Computer Programs For Construction ManagementDocument1 paginăBook Reviews: Computer Programs For Construction ManagementManjith BoseÎncă nu există evaluări
- Design of Intelligent Braking System: February 2000Document7 paginiDesign of Intelligent Braking System: February 2000Nihal RajÎncă nu există evaluări
- Sensors 18 00366 PDFDocument21 paginiSensors 18 00366 PDFAgoeng NoegrossÎncă nu există evaluări
- Instant Inkjet Circuits: Lab-Based Inkjet Printing To Support Rapid Prototyping of Ubicomp DevicesDocument10 paginiInstant Inkjet Circuits: Lab-Based Inkjet Printing To Support Rapid Prototyping of Ubicomp Devicesreader152000Încă nu există evaluări
- Performance Analysis of Proximity and Light Sensors For Smart ParkingDocument8 paginiPerformance Analysis of Proximity and Light Sensors For Smart ParkingWhiteCrossesÎncă nu există evaluări
- Project in Industrial ElectronicsDocument50 paginiProject in Industrial ElectronicsShiela100% (1)
- Review On Garbage Monitoring System Using Internet of ThingsDocument5 paginiReview On Garbage Monitoring System Using Internet of ThingsVishal RanaÎncă nu există evaluări
- 3-D Printable Open Source Dual Axis Gimbal System For OptoelectronicDocument13 pagini3-D Printable Open Source Dual Axis Gimbal System For Optoelectronicmuhammet zahit bakışÎncă nu există evaluări
- Muntasirrahman 2018Document5 paginiMuntasirrahman 2018vivekÎncă nu există evaluări
- Synopsis of IotDocument7 paginiSynopsis of IotPramod Kumar50% (2)
- A Study of Use of Internet of Things and Machine Learning in Smart Waste ManagementDocument5 paginiA Study of Use of Internet of Things and Machine Learning in Smart Waste ManagementIJAR JOURNALÎncă nu există evaluări
- Muhammad Hanif 2020 IOP Conf. Ser. Earth Environ. Sci. 426 012039Document10 paginiMuhammad Hanif 2020 IOP Conf. Ser. Earth Environ. Sci. 426 012039vikasÎncă nu există evaluări
- MITS5003 - Wireless Networks & Communication - Research StudyDocument6 paginiMITS5003 - Wireless Networks & Communication - Research StudyDhana PandulaÎncă nu există evaluări
- Eisenbach IJCNN 2017Document10 paginiEisenbach IJCNN 2017Syed MubashirhussainÎncă nu există evaluări
- A New Prototype of Smart Parking Using Wireless Sensor NetworksDocument7 paginiA New Prototype of Smart Parking Using Wireless Sensor NetworksLina ZapataÎncă nu există evaluări
- 1 s2.0 S2212827122000245 MainDocument6 pagini1 s2.0 S2212827122000245 Mainbellofriday61Încă nu există evaluări
- Cataloging of Road Traffic Signs (Building Deep Learning Model and Android Application)Document15 paginiCataloging of Road Traffic Signs (Building Deep Learning Model and Android Application)IJRASETPublicationsÎncă nu există evaluări
- Vigilancia Tecnologica: Programa Ingenieria IndustrialDocument11 paginiVigilancia Tecnologica: Programa Ingenieria IndustrialAndrés MalvaÎncă nu există evaluări
- E-Smart Bin Technology & Waste Segregation SystemDocument4 paginiE-Smart Bin Technology & Waste Segregation Systemvenkata sai gireesh pÎncă nu există evaluări
- What Can MEMS Do For Logistics of Food Intelligent Container Technologies A ReviewDocument9 paginiWhat Can MEMS Do For Logistics of Food Intelligent Container Technologies A ReviewANJU A CHANDRANÎncă nu există evaluări
- The Use of Computer Controlled Line Follower Robots in Public TransportDocument7 paginiThe Use of Computer Controlled Line Follower Robots in Public TransportKhairul NaimÎncă nu există evaluări
- Performance Analysis of BER in CDMA Using Various Coding & Simulation TechniquesDocument6 paginiPerformance Analysis of BER in CDMA Using Various Coding & Simulation TechniquesEditor IJRITCCÎncă nu există evaluări
- Anapplication of Dijkstra's Algorithm To Shortest Route ProblemDocument13 paginiAnapplication of Dijkstra's Algorithm To Shortest Route ProblemGaurav KumarÎncă nu există evaluări
- IJRTI2304047Document4 paginiIJRTI2304047Himanshu KumarÎncă nu există evaluări
- (J) 2020 - Development of Intelligent Waste Segregation System Based On Convolutional Neural NetworkDocument13 pagini(J) 2020 - Development of Intelligent Waste Segregation System Based On Convolutional Neural Networkdr.awawdeh.moathÎncă nu există evaluări
- Fin Irjmets1680116934Document4 paginiFin Irjmets1680116934kasturi haseÎncă nu există evaluări
- Robust Railway Crack Detection Scheme (RRCDS) Using LED-LDR AssemblyDocument6 paginiRobust Railway Crack Detection Scheme (RRCDS) Using LED-LDR AssemblyMohanaprakash EceÎncă nu există evaluări
- Ips Um Thesis FormatDocument5 paginiIps Um Thesis Formatlizhernandezalbuquerque100% (2)
- Fire Fighting Robot With AIDocument21 paginiFire Fighting Robot With AINayomikareddyÎncă nu există evaluări
- Architecture Less Smart System For Green and Clean Environment (Smart City Solution)Document6 paginiArchitecture Less Smart System For Green and Clean Environment (Smart City Solution)Nouman RasheedÎncă nu există evaluări
- Detection of Humps and Potholes On Roads and Notifying The Same To The DriversDocument4 paginiDetection of Humps and Potholes On Roads and Notifying The Same To The Driversdhanu suriyaÎncă nu există evaluări
- Smart Dust: Technical SeminarDocument10 paginiSmart Dust: Technical SeminarJagadeesh VadlamudiÎncă nu există evaluări
- Integrating Arduino-Based Educational Mobile Robots in ROSDocument6 paginiIntegrating Arduino-Based Educational Mobile Robots in ROSPranjul SinghÎncă nu există evaluări
- Cost Effective Iot Based Garbage Monitoring System For Urban Waste ManagementDocument21 paginiCost Effective Iot Based Garbage Monitoring System For Urban Waste ManagementSharang Ambadkar100% (1)
- Research ProjectDocument8 paginiResearch ProjectengrkskÎncă nu există evaluări
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionDe la EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionÎncă nu există evaluări
- Overview On The Object Rejection and Counting Machine: July 2017Document4 paginiOverview On The Object Rejection and Counting Machine: July 2017dhanshri kolekarÎncă nu există evaluări
- Project Report FinalDocument80 paginiProject Report FinalShyam RajÎncă nu există evaluări
- Example Thesis Final Year ProjectDocument5 paginiExample Thesis Final Year Projectlynakavojos3100% (2)
- 2013 Cable-Driven Parallel Robots. Vol.12-Springer (2013)Document445 pagini2013 Cable-Driven Parallel Robots. Vol.12-Springer (2013)Thanh Hai NguyenÎncă nu există evaluări
- Wearable Computing: A Review: January 2005Document16 paginiWearable Computing: A Review: January 2005Umesh WalunjkarÎncă nu există evaluări
- Design of Intelligent Braking System: February 2000Document7 paginiDesign of Intelligent Braking System: February 2000Sandeepkumar SgÎncă nu există evaluări
- Low Cost High Freq Data Acq System For Condition Monitoring of Rotating Machinery Case Study - Cesar Ricardo - 2020Document19 paginiLow Cost High Freq Data Acq System For Condition Monitoring of Rotating Machinery Case Study - Cesar Ricardo - 2020Adrian CoroianÎncă nu există evaluări
- 2.CHAPTER TWO - ApataDocument20 pagini2.CHAPTER TWO - ApataShams JimohÎncă nu există evaluări
- Least Squares Orthogonal Distance Fitting of Curves and Surfaces in SpaceDocument149 paginiLeast Squares Orthogonal Distance Fitting of Curves and Surfaces in SpaceClaudiuÎncă nu există evaluări
- Design and Development of An Automatic Tool Changer For An Articulated Robot ArmDocument7 paginiDesign and Development of An Automatic Tool Changer For An Articulated Robot Armsai jaswanth putturuÎncă nu există evaluări
- Radio Access Technology Selection in Heterogeneous Wireless Networks: Aroma'S ViewDocument32 paginiRadio Access Technology Selection in Heterogeneous Wireless Networks: Aroma'S ViewCelso MonteiroÎncă nu există evaluări
- Podrazka 2017Document8 paginiPodrazka 2017inspagintÎncă nu există evaluări
- Development of A Rotation Acquisition System For Generator Sets Using Arduino PlatformDocument8 paginiDevelopment of A Rotation Acquisition System For Generator Sets Using Arduino PlatformSavyo SoaresÎncă nu există evaluări
- Microwave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsDe la EverandMicrowave and Millimeter Wave Circuits and Systems: Emerging Design, Technologies and ApplicationsÎncă nu există evaluări
- Satellite Interferometry Data Interpretation and Exploitation: Case Studies from the European Ground Motion Service (EGMS)De la EverandSatellite Interferometry Data Interpretation and Exploitation: Case Studies from the European Ground Motion Service (EGMS)Încă nu există evaluări
- Wind Driven Mobile Charging of Automobile BatteryDocument7 paginiWind Driven Mobile Charging of Automobile Batterysuraj dhulannavarÎncă nu există evaluări
- Visvesvaraya Technological University BelgaumDocument2 paginiVisvesvaraya Technological University Belgaumsuraj dhulannavarÎncă nu există evaluări
- 1:1 XXX A1: Toshavi PCDocument1 pagină1:1 XXX A1: Toshavi PCsuraj dhulannavarÎncă nu există evaluări
- FrameDocument1 paginăFramesuraj dhulannavarÎncă nu există evaluări
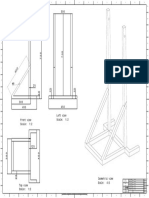
- Left View Scale: 1:2: 1:1 XXX A0Document1 paginăLeft View Scale: 1:2: 1:1 XXX A0suraj dhulannavarÎncă nu există evaluări
- FrameDocument1 paginăFramesuraj dhulannavarÎncă nu există evaluări
- M.H.Saboo Siddik PolytechnicDocument5 paginiM.H.Saboo Siddik Polytechnicsuraj dhulannavarÎncă nu există evaluări
- WWW Mechengg Net 2015 09 Design and Fabrication of InjectionDocument17 paginiWWW Mechengg Net 2015 09 Design and Fabrication of Injectionsuraj dhulannavarÎncă nu există evaluări
- 1:1 XXX A1: Toshavi 5/3/2016Document1 pagină1:1 XXX A1: Toshavi 5/3/2016suraj dhulannavarÎncă nu există evaluări
- 1:1 XXX A4: Designed By: DateDocument1 pagină1:1 XXX A4: Designed By: Datesuraj dhulannavarÎncă nu există evaluări
- 1:1 XXX A4: Toshavi 4/8/2016Document1 pagină1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarÎncă nu există evaluări
- 1:1 XXX A1: Designed By: DateDocument1 pagină1:1 XXX A1: Designed By: Datesuraj dhulannavarÎncă nu există evaluări
- Conmaco 385 Winch ManualDocument44 paginiConmaco 385 Winch ManualdarioÎncă nu există evaluări
- 33kV Breaker - GTPDocument7 pagini33kV Breaker - GTPMohan ThakurÎncă nu există evaluări
- Solar Water Pump Irrigation With Different Time SlotsDocument3 paginiSolar Water Pump Irrigation With Different Time SlotsIJRASETPublications0% (1)
- DC Motors Introduction, Equivalent Circuit, TypesDocument22 paginiDC Motors Introduction, Equivalent Circuit, Typesmalik karim dadÎncă nu există evaluări
- S.N. Description of Works Quantity Unit Rate Total Amount RemarksDocument11 paginiS.N. Description of Works Quantity Unit Rate Total Amount RemarksSagar AcharyaÎncă nu există evaluări
- Dokumen - Tips - Wood Group Sps Surface Pumping SystemsDocument7 paginiDokumen - Tips - Wood Group Sps Surface Pumping SystemsHussein A.Încă nu există evaluări
- Rexroth MCR-FDocument14 paginiRexroth MCR-FAbhishek Kadam100% (1)
- LG T7018aeep5Document37 paginiLG T7018aeep5Imthiyas Ahmed100% (1)
- Partes AFDDocument128 paginiPartes AFDPaulina Ávila PérezÎncă nu există evaluări
- V and Inverted V Curves of Synchronous MotorDocument7 paginiV and Inverted V Curves of Synchronous Motorkarthikeyan249Încă nu există evaluări
- Luxel 9000 S.MDocument448 paginiLuxel 9000 S.Mjules RomainÎncă nu există evaluări
- Operation Instructions - Multi-Turn - Actuators - SAEx - 07.2-SAEx - 16.2 - SAREx - 07.2-SAREx - 16.2 - Control - HART - enDocument108 paginiOperation Instructions - Multi-Turn - Actuators - SAEx - 07.2-SAEx - 16.2 - SAREx - 07.2-SAREx - 16.2 - Control - HART - enPeter RhoadsÎncă nu există evaluări
- Data Sheet MX 1800 4Document7 paginiData Sheet MX 1800 4Edgar Bonilla MuñozÎncă nu există evaluări
- Design and Protective Measures of A PFI-Plant PDFDocument105 paginiDesign and Protective Measures of A PFI-Plant PDFrehanÎncă nu există evaluări
- Acceleration of Unbalanced Rotors - Lectura PendienteDocument6 paginiAcceleration of Unbalanced Rotors - Lectura PendienteAgustín Erasmo Juárez MartínezÎncă nu există evaluări
- Robotic ManualDocument47 paginiRobotic ManualChhailender Singh BansalÎncă nu există evaluări
- Bill of Materials (Portable Electric Fan)Document3 paginiBill of Materials (Portable Electric Fan)MuhdAisar96Încă nu există evaluări
- Master Drive Unit: AC AC AC ACDocument20 paginiMaster Drive Unit: AC AC AC ACChristian Bedoya100% (1)
- Automatic Page TurnerDocument13 paginiAutomatic Page TurnerSaai Subha ShreeÎncă nu există evaluări
- Grounding and Cabling of The Drive System - Variable Speed DrivesDocument40 paginiGrounding and Cabling of The Drive System - Variable Speed DrivesMiguel AngelÎncă nu există evaluări
- Erv PW15 2022Document6 paginiErv PW15 2022ktp070Încă nu există evaluări
- ATV900 Programming Manual en NHA80757 09Document708 paginiATV900 Programming Manual en NHA80757 09Radwan AL TrougÎncă nu există evaluări
- EM 2 Unit 1 Notes (R20) 1Document45 paginiEM 2 Unit 1 Notes (R20) 1tripgokarna08Încă nu există evaluări
- MP Lab ManualDocument36 paginiMP Lab Manualapi-19951707Încă nu există evaluări
- Hydrovar and Packaged Hydrovar: Motor Mount Variable Speed Pump Controller and Integrated Pump PackagesDocument8 paginiHydrovar and Packaged Hydrovar: Motor Mount Variable Speed Pump Controller and Integrated Pump PackagesMohamed Abdel MageedÎncă nu există evaluări
- System Identification of A Hobby DC Motor Using A Low CostDocument6 paginiSystem Identification of A Hobby DC Motor Using A Low CostBrasoveanu GheorghitaÎncă nu există evaluări
- Altivar Machine ATV320 - ATV320U04M3CDocument10 paginiAltivar Machine ATV320 - ATV320U04M3CRobie EricssonÎncă nu există evaluări