S-ar putea să vă placă și
- ABC de La Seguridad en Las Mediciones Electricas PDFDocument7 paginiABC de La Seguridad en Las Mediciones Electricas PDFjvilasisÎncă nu există evaluări
- Que Son SesionesDocument12 paginiQue Son SesionesjoseDavidQÎncă nu există evaluări
- Manual de Instalaciones Eléctricas PDFDocument119 paginiManual de Instalaciones Eléctricas PDFDaniel Alaniz89% (19)
- Que Son SesionesDocument12 paginiQue Son SesionesjoseDavidQÎncă nu există evaluări
- FrasesDocument1 paginăFrasesjoseDavidQÎncă nu există evaluări
- Manual Flash 5 EsDocument390 paginiManual Flash 5 EsNahui Atl CuetzpallinÎncă nu există evaluări
- La AlarmaDocument6 paginiLa AlarmajoseDavidQÎncă nu există evaluări
- Manual JOMLADocument26 paginiManual JOMLAEliza RiveraÎncă nu există evaluări
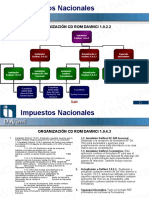
- Organización DaVinciDocument3 paginiOrganización DaVincijoseDavidQÎncă nu există evaluări
- El Enfoque Sistémico EsDocument4 paginiEl Enfoque Sistémico EsjoseDavidQÎncă nu există evaluări
- Manual JOMLADocument26 paginiManual JOMLAEliza RiveraÎncă nu există evaluări
- FuncionalDocument3 paginiFuncionaljoseDavidQÎncă nu există evaluări
- Form Rude Alternativa PDFDocument2 paginiForm Rude Alternativa PDFjoseDavidQ100% (2)
- Manual Básico de BobinadosDocument88 paginiManual Básico de Bobinadoshbv96% (52)
- CB 0450351Document128 paginiCB 0450351joseDavidQÎncă nu există evaluări
- Dinamica de Sistemas PDFDocument16 paginiDinamica de Sistemas PDFrosveronÎncă nu există evaluări
- Objetivo Del Modulo Hardware y SoftwareDocument1 paginăObjetivo Del Modulo Hardware y SoftwarejoseDavidQÎncă nu există evaluări
- FundamentacionDocument1 paginăFundamentacionjoseDavidQÎncă nu există evaluări
- Programacion FPBDocument193 paginiProgramacion FPBterrapiaÎncă nu există evaluări
- Ficha Técnica Hardware de ComputadorasDocument2 paginiFicha Técnica Hardware de ComputadorasjoseDavidQÎncă nu există evaluări
- 8448199723Document10 pagini8448199723joseDavidQÎncă nu există evaluări
- Analisis Estrategico y de Sistemas de Informacion Mercadona PDFDocument117 paginiAnalisis Estrategico y de Sistemas de Informacion Mercadona PDFjoseDavidQÎncă nu există evaluări
- Institutos BoliviaDocument88 paginiInstitutos BoliviaIber GalloÎncă nu există evaluări
- Programación de ComputadorasDocument12 paginiProgramación de ComputadorasjoseDavidQÎncă nu există evaluări
- Metricas de BangDocument22 paginiMetricas de BangMark IsmÎncă nu există evaluări
- Analisis Estrategico y de Sistemas de Informacion Mercadona PDFDocument117 paginiAnalisis Estrategico y de Sistemas de Informacion Mercadona PDFjoseDavidQÎncă nu există evaluări
- Documento CompletoDocument6 paginiDocumento CompletoCarlos Andres Duarte AmadoÎncă nu există evaluări
- La Importancia de Las Prácticas en La Formación ProfesionalDocument10 paginiLa Importancia de Las Prácticas en La Formación ProfesionaljoseDavidQÎncă nu există evaluări
- El Escrito de Una TesisDocument17 paginiEl Escrito de Una TesisjoseDavidQÎncă nu există evaluări
- Actividad Guillermo 23Document3 paginiActividad Guillermo 23Yurdley barraza aurelaÎncă nu există evaluări
- Taller 1tablas de Frecuencia y Gráficos 1Document3 paginiTaller 1tablas de Frecuencia y Gráficos 1Dario Fernando CAICEDO LOPEZÎncă nu există evaluări
- Manual Lenovo Ideapad 330SDocument30 paginiManual Lenovo Ideapad 330SJose Muñoz100% (1)
- Informatica InstrumentalDocument3 paginiInformatica Instrumentalicepolo100% (1)
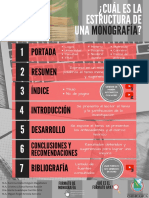
- ¿Cuál Es La Estructura de Una MonografíaDocument1 pagină¿Cuál Es La Estructura de Una MonografíaFrancisco Rene CarranzaÎncă nu există evaluări
- Pintado de Figuras Con OpenGL y Lectura de Imagenes en PNM (Computación Gráfica)Document18 paginiPintado de Figuras Con OpenGL y Lectura de Imagenes en PNM (Computación Gráfica)Hecate BauklotzeÎncă nu există evaluări
- Ciclos de Repeticion en JavaDocument22 paginiCiclos de Repeticion en JavaCarlos OntibonÎncă nu există evaluări
- Normas Isa s88Document49 paginiNormas Isa s88Jozé LuisÎncă nu există evaluări
- Manual para Realizar Inventarios Ciclicos BrianDocument5 paginiManual para Realizar Inventarios Ciclicos Brianbrian jose valera molinaÎncă nu există evaluări
- Manual Windows 7Document42 paginiManual Windows 7Ana MartinezÎncă nu există evaluări
- Proyecto Instrumentación VirtualDocument76 paginiProyecto Instrumentación VirtualFernando Flores CassiaÎncă nu există evaluări
- Curso de Trabajo en Altura y Proteccion de Caidas 2Document10 paginiCurso de Trabajo en Altura y Proteccion de Caidas 2LeonardoEnriqueCastilloMunozÎncă nu există evaluări
- Papers para Programacion Dinamica DeterministicaDocument49 paginiPapers para Programacion Dinamica DeterministicaJhon Argomedo De La CruzÎncă nu există evaluări
- Medidas de Almacenamiento de InformaciónDocument2 paginiMedidas de Almacenamiento de InformaciónAbel MartinezÎncă nu există evaluări
- Autómatas ProgramablesDocument12 paginiAutómatas ProgramablesRuben Mejía AlmeidaÎncă nu există evaluări
- El Libro Está Más Cerca en La Era Digital PDFDocument3 paginiEl Libro Está Más Cerca en La Era Digital PDFJhonny LariosÎncă nu există evaluări
- Tarea Integradora de ExcelDocument5 paginiTarea Integradora de ExcelLuisJesusAguilarÎncă nu există evaluări
- Investigacion DocumentalDocument11 paginiInvestigacion DocumentalElisa MarielÎncă nu există evaluări
- Ejercicios Fundamentos Tema IVDocument4 paginiEjercicios Fundamentos Tema IVromelÎncă nu există evaluări
- AP6-AA2-Ev1-Usar Lenguaje Transaccional Sobre La Base de DatosDocument23 paginiAP6-AA2-Ev1-Usar Lenguaje Transaccional Sobre La Base de DatosValeria Camila Vizcaino SandovalÎncă nu există evaluări
- Manual Cursos DistanciaDocument6 paginiManual Cursos DistanciaLaura AJuarezÎncă nu există evaluări
- Ejercicios Clase 4 Mi ViDocument7 paginiEjercicios Clase 4 Mi ViMar GeistÎncă nu există evaluări
- Minería de Datos y Detección de FraudeDocument12 paginiMinería de Datos y Detección de FraudeLilia MuñozÎncă nu există evaluări
- Ficha para Capacitación de Concar CB Basico 20-23Document2 paginiFicha para Capacitación de Concar CB Basico 20-23Jonathan Geomar Ortiz OjedaÎncă nu există evaluări
- NmapDocument4 paginiNmapmiguelÎncă nu există evaluări
- Manual Auto Determinacion TSSDocument9 paginiManual Auto Determinacion TSSLuis R. VillafañaÎncă nu există evaluări
- 00-UT2.1 - Modelo de DatosDocument10 pagini00-UT2.1 - Modelo de DatosSantiago rubio palouÎncă nu există evaluări
- Acceso Clientes Servicios Web Exchange Server 2007Document42 paginiAcceso Clientes Servicios Web Exchange Server 2007Manuel Ceron ArayaÎncă nu există evaluări
- Champions Plato LeagueDocument4 paginiChampions Plato LeagueDylan HernandezÎncă nu există evaluări
- Tesis Lennin Cenas VásquezDocument155 paginiTesis Lennin Cenas Vásquezsara rasmussenÎncă nu există evaluări