IJRET: International Journal of Research in Engineering and Technology
eISSN: 2319-1163 | pISSN: 2321-7308
PATH PLANNING USING VREP
K. Karteek Reddy1, K.Praveen2
1, 2
Department of Mechanical Engineering, M.V.G.R. College of Engineering, JNTU (Kakinada Vizianagaram, Andhra
Pradesh, India, karteek968@gmail.com, praveenkalla@mvgrce.edu.in
Abstract
This paper presents an overview of path planning of a mobile robot using VREP [Virtual Robot Experimentation Platform] which is a
powerful m3D simulator that create, compose, simulate any robot and is said to be a Swiss army knife among robot simulators. This
allows for versatile prototyping applications including systems verification, safety/remote monitoring, rapid algorithm development,
the robot model can be added by various entities and primitive shapes and sensors which include proximity sensor, vision sensor, and
force sensor with different shapes.
Index terms: Path planning, VREP, Mobile robot
---------------------------------------------------------------------***-----------------------------------------------------------------------1. INTRODUCTION
2.4 Minimum Distance Calculations
The overall architecture and control methodology are crucial
elements in robot simulators. Now a days the robots are
employing with highly complex control methods when
compared to the robots in the previous generations ,as well as
the processing power of computers also increases, A good
simulation requires careful architecture to get both performance
and accurate calculations (particularly with respect to dynamic
conditions). For example, the dynamics model is used rarely
when the kinematics is failed on V-REP's control methodology;
in V-REP, control is distributed and based on an unlimited
number of scripts that are directly associated or attached to
scene objects. Finally, in order to further clarify elements
introduced in the first and second part of this paper, the third
party describes via typical VREP simulation software.
Allows fast minimum distance calculations between any
geometries ie convex, concave, open or closed or collection of
geometries. The module uses the same data structures as the
collision detection module. Additional optimization is also
achieved with a temporal coherency caching technique
2. CALCULATION MODULES
2.1 Inverse Kinematics
Allowing handling any type of mechanisms i e branched, closed,
redundant, containing nested loops. The module is based on
calculation of the damped least squares pseudo inverse [1]. It
supports conditional solving, damped and weighted resolution,
and obstacle avoidance based constraints.
Fig1 Calculation module dialog box
2.5 Physics/Dynamics
2.2 Collision Detections
Allowing fast interference checking between any geometry or
collection of geometries with optimal collision contour
calculation The module uses data structures based on a binary
tree of Oriented Bounding Boxes [3] for accelerations.
Additional optimization is achieved with a temporal coherency
caching technique
2.3 Path Planning
Allowing holonomic and non holonomic path planning tasks
Allows handling rigid body dynamics calculation and
interaction (collision response, grasping, etc.) via the Bullet
Physics Library [7]
2.6 Geometric Constraint Solver Module
Allowing to intuitively to solve/actuate/interact with mechanism
.It is a perfect tool for fast prototyping and verification .The
models are available in this simulator itself or we can import the
models by designing in the modeling softwares which may be
holonomic or non holonomic robots and is also for remote
__________________________________________________________________________________________
Volume: 02 Issue: 09 | Sep-2013, Available @ http://www.ijret.org
94
IJRET: International Journal of Research in Engineering and Technology
monitoring, fast algorithm development, robotics related
education and simulation of factory automation
3. SCENE OBJECTS
A V-REP simulation scene contains several scene objects or
elemental objects. The following scene objects are supported in
V-REP:
eISSN: 2319-1163 | pISSN: 2321-7308
3.9 Paths
Paths allow complex movement definitions in space (succession
of freely combinable translations, rotations and/or pauses), and
are used for guiding a welding robot's torch along a predefined
trajectory, or for allowing conveyor belt movements
3.1 Shapes
Shapes are triangular meshes, used for rigid body visualization.
3.2 Cameras and Lights
Cameras and lights are used for scene visualization purposes
mainly, but can also have effects on other scene objects (e.g.
lights directly influence rendering sensors). Sensors make use of
hard- ware acceleration for the raw image acquisition
3.3 Dummies
Dummies are \points with orientation," or reference frames, that
can be used for various tasks, and are mainly used in
conjunction with other scene objects,
3.4 Proximity Sensors
The proximity sensors objects perform an exact minimum
distance calculation within a given detection [4] ) as opposed to
simply performing collision detection between some selected
sensing rays and the environment; hence allowing for reactance
effects due to sensor/surface angles.
Fig2 Simulation loop in VREP
3.5 Rendering sensors:
Rendering sensors In V-REP are camera-like sensors, allowing
to extract complex image information from a simulation scene
(colors, object sizes, depth maps, etc lter elements via plug ins).
Rendering
3.6 Force Sensors
Force sensors are rigid links between shapes, that can record
applied forces and torques, and that can conditionally saturate
3.7 Graphs
Graphs are scene objects that can record a large variety of one
dimensional data streams. Data streams can be displayed
directly (time graph of a given data type), or combined with
each other to display X/Y graphs,
or 3D curves.
3.8 Mills
Mills are customizable convex volumes that can be used to
simulate surface cutting operations on shapes (e.g., milling,
laser cutting
Fig 3 Path planning model created by elements
__________________________________________________________________________________________
Volume: 02 Issue: 09 | Sep-2013, Available @ http://www.ijret.org
95
IJRET: International Journal of Research in Engineering and Technology
eISSN: 2319-1163 | pISSN: 2321-7308
The simulator operates by advancing the simulation time at
constant time steps. Following figure illustrates the main
simulation loop: positions of the model with respect to axes
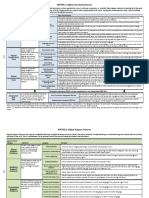
The table shows the orientations and position of different
elements used to construct a model
Blocks
MAZE
MAZE
MAZE
MAZE
START
CONFIG
URATIO
N
GOAL
CONFIG
URATIO
N
X
0.1
0.275
-0.275
0.1250
-0.1919
Y
0.25
-0.25
-0.25.
0
0.4010
Z
0.025
0.025
0.025
0.025
0.025
-0.3795
-0.3795
0.0251
5. SCRIPTS
Fig4: Another view of the scene
4. SIMULATION PROCESS
A simulation in V-REP can be started, paused and stopped. The
simulation can be done by using the bullet dynamics engine,
ODE dynamics engine and real time simulation [7]. Each time
the main script was executed, the simulation time is incremented
by the simulation time step. Using large time steps results in fast
but inaccurate/unstable simulations. During real-time
simulation, it can happen that the simulation time is not able to
follow the real-time (e.g. because of some momentarily heavy
calculations). In that case, if this check-box is selected, then the
simulation time will try catching up the lost time (e.g. when the
calculation load is again reduced), which results in an apparent
speed-up A path linking the start configuration to the goal
configuration can be specified (or restricted to be) in a
configuration space with a specific number of dimensions (e.g.
the X, Y configuration space).[6]. Moreover additional
constraints are usually needed that make the task more
complicated (e.g. keeping a certain distance threshold to the
obstacles, or moving only in one direction A page in V-REP is
the main viewing surface of a scene. It is not directly a view,
but can contain one, two, or as so many views as needed.
In V-REP, each script has a list of simulation parameters. Those
parameters can be used as a quick way of adjusting values of a
specific model for example (e.g. the maximum velocity of a
mobile robot)[2]. The script simulation parameters for a script
can be accessed by double-clicking the appropriate icon in the
scene hierarchy: script simulation parameters are also used for
specific inter-script messaging purpose
5.1 Initialization Section
The initialization section should be run only the first time the
script or program is run. , however: remember, scene objects as
well as child scripts
A view is what is used to display the image content of a specific
object which has to be a viewable object. If a view is associated
with a camera object for instance, then it can display what the
camera sees. Following figure explains the page, view and
viewable object relationship.
Fig5 Main simulation loop
__________________________________________________________________________________________
Volume: 02 Issue: 09 | Sep-2013, Available @ http://www.ijret.org
96
IJRET: International Journal of Research in Engineering and Technology
It can be copy/pasted into a scene at any time, even when a
simulation is running.
5.2 Simulation Section
The simulation section should always be run and n the
simulation section should always be run and no specific state
monitoring is required except for threaded child scripts.
Threaded child scripts should make sure to end execution If not,
the simulator will wait longer than needed before being able to
end a simulation, and the restoration code of the threaded child
script might not be run
5.3 Restoration Section:
The restoration section should be run just before a simulation
ends. Threaded child scripts on the other hand do not need to
monitor any state for the restoration: the restoration section is
simply the last part of the code
6. Non threaded child scripts
Non-threaded child scripts are pass-through scripts. This means
that every time they are called, they should perform some task
and then return control to the calling script[5]. If control is not
returned to the calling script, then the whole simulation halts.
They operate as functions and normally non threaded child
scripts are called at each simulation step (each time with a
different simulation time). This type of child script should
always be used over threaded child scripts whenever possible.
7. Threaded child scripts
Threaded child scripts are scripts that will launch in a thread.
This means that a call to a threaded child script will launch a
new thread and then directly return[8]. The new thread will then
execute in parallel. When a threaded child script was already
launched (and didn't end yet) but is called again, then the call is
ignored. An execute once option is set by default. There can be
as many threaded child scripts running as needed. A threaded
child script icon in the scene hierarchy
eISSN: 2319-1163 | pISSN: 2321-7308
versatile and scalable framework that _ts the simulation needs of
complex robotic systems is its distributed control approach; it is
possible to test configurations with 2, 3, or up to several
hundreds of (identical or different) robots. Thus the path
planning of a robot using this simulator is very fast and we can
observe keenly by cameras provided
REFERENCES
[1] Wampler, C.W.: Manipulator inverse kinematic solutions
based on vector formulations and damped least squares
methods. IEEE Trans. Syst., Man, Cybern. 16(1), 93{101 (1986)
[2] Lua, http://www.lua.org
[3] Gottschalk, S., Lin, M.C., Manocha, D.: OBB-tree : a
hierarchical structure for rapid interference detection. In: ACM
SIGGRAPH. pp. 171{180. New Orleans, USA
(October 1996)
[4]Freese, M., Ozaki, F., Matsuhira, N.: Collision detection,
distance calculation and proximity sensor simulation using
oriented bounding box trees. In: 4th International Conference on
Advanced Mechatronics. pp. 13{18. Asahikawa, Japan (October
2004)
[5] Marc Freese*, Surya Singh, Fumio Ozaki, and Nobuto
Matsuhira *K-Team Corporation, Y-Parc - Rue Galil_ee 9, 1400
Yverdon-les-Bains,
Switzerland
mfreese@gmx.ch,spns@acfr.usyd.edu.au,
[6] Ku_ner Jr., J.J.: RRT-connect: an e_cient approach to singlequery path planning. In: IEEE International Conference on
Robotics and Automation. pp. 995{1001. San Fransisco, USA
(April 2000)
[7] Bullet physics library, http://www.bulletphysics.org
[8] Ando, N., Suehiro, T., Kitagaki, K., Kotoku, T., Yoon, W.:
RT-component object model in RT-middleware - distributed
component middleware for RT (robot technology). In: 2005
IEEE International Symposium on Computational Intelligence
in= Robotics and Automation (CIRA2005). pp. 457{462. Espoo,
Finland (June 2005)
Threaded child scripts can in their turn call non-threaded as well
as threaded child scripts. When a non-threaded child script is
called from a thread that is not the main thread, then the child
script is said to be running in a thread.
Threaded child scripts have several weaknesses compared to
non-threaded child scripts if not programmed appropriately:
they are more resource-intensive, they can waste some
processing time, and they can be a little bit less responsive to a
simulation stop command.
CONCLUSIONS
V-REP demonstrates a path planning task by framing the model
and the simulation is run by setting the time interval, choosing
the simulation ie real time , ODE, bullet. This results in a
__________________________________________________________________________________________
Volume: 02 Issue: 09 | Sep-2013, Available @ http://www.ijret.org
97
S-ar putea să vă placă și
- Discrete Event SimulationDocument140 paginiDiscrete Event Simulationssfofo100% (1)
- BlastingDocument138 paginiBlastingcklconÎncă nu există evaluări
- Numerical Solution Algorithms For Compressible FlowsDocument207 paginiNumerical Solution Algorithms For Compressible Flowsosoreneg100% (4)
- Machine Learning Toolkit User ManualDocument7 paginiMachine Learning Toolkit User ManualEduardo LoyoÎncă nu există evaluări
- Comparison of Various Cloud Simulators Available in The Cloud ComputingDocument15 paginiComparison of Various Cloud Simulators Available in The Cloud ComputingTamal BhattacharyyaÎncă nu există evaluări
- PTE 3 Week Study ScheduleDocument3 paginiPTE 3 Week Study ScheduleesatjournalsÎncă nu există evaluări
- MBD PDFDocument53 paginiMBD PDFMina ZakariaÎncă nu există evaluări
- Analysis and Design of A Multi Compartment Central Cone Cement Storing Silo PDFDocument7 paginiAnalysis and Design of A Multi Compartment Central Cone Cement Storing Silo PDFesatjournalsÎncă nu există evaluări
- MATRIX 1: Digital Learning Resources: Digital Academic Content ToolsDocument2 paginiMATRIX 1: Digital Learning Resources: Digital Academic Content ToolsSheila Mae Cordero TabuenaÎncă nu există evaluări
- Double Suction Centrifugal PumpDocument8 paginiDouble Suction Centrifugal PumpBilal WaseemÎncă nu există evaluări
- Modeling and Simulation of Discrete Event SystemsDe la EverandModeling and Simulation of Discrete Event SystemsÎncă nu există evaluări
- CH 1 Introduction To Reservoir Modelling SimulationDocument59 paginiCH 1 Introduction To Reservoir Modelling Simulationनाइम दीन100% (2)
- Analysis of Cylindrical Shell Structure With Varying Parameters PDFDocument6 paginiAnalysis of Cylindrical Shell Structure With Varying Parameters PDFesatjournalsÎncă nu există evaluări
- Virtual Robot Experimentation Platform V-REP: A Versatile 3D Robot SimulatorDocument12 paginiVirtual Robot Experimentation Platform V-REP: A Versatile 3D Robot SimulatorPraveen D JadhavÎncă nu există evaluări
- Sim DocDocument7 paginiSim Docmanju439Încă nu există evaluări
- Quadruped Walking Running SimulationDocument49 paginiQuadruped Walking Running SimulationbilynbkÎncă nu există evaluări
- Scara RobotDocument13 paginiScara RobotMuhammad Ikhsan Al-fatihÎncă nu există evaluări
- 2 Dipak Vinayak Shirbhate VSRDIJMCAPE 3631 Research Paper 4 8 August 2014Document8 pagini2 Dipak Vinayak Shirbhate VSRDIJMCAPE 3631 Research Paper 4 8 August 2014DIPAK VINAYAK SHIRBHATEÎncă nu există evaluări
- Matlab For SolidworksDocument18 paginiMatlab For SolidworksAle' AmoudiÎncă nu există evaluări
- Cómo Usar Working ModelDocument12 paginiCómo Usar Working ModelJorgeLuÎncă nu există evaluări
- Multi 20 SensorDocument9 paginiMulti 20 SensorMemory KambaÎncă nu există evaluări
- Simulation of Robotic ManipulatorsDocument6 paginiSimulation of Robotic ManipulatorstaydomanÎncă nu există evaluări
- 1 - Introduction To Proteus VSM (Part I) : LAB ObjectivesDocument16 pagini1 - Introduction To Proteus VSM (Part I) : LAB ObjectivesNirmal Kumar Pandey100% (1)
- Survey of Vision-Based Robot Control: Ezio Malis INRIA, Sophia Antipolis, France, Ezio - Malis@Document16 paginiSurvey of Vision-Based Robot Control: Ezio Malis INRIA, Sophia Antipolis, France, Ezio - Malis@Saran CoolÎncă nu există evaluări
- Performance of System Functions As Effective Simulation Tool For Implementation of Customized AlgorithmsDocument7 paginiPerformance of System Functions As Effective Simulation Tool For Implementation of Customized AlgorithmsInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- SimulationDocument3 paginiSimulationloubna ghiritiÎncă nu există evaluări
- DEPTH MAPstereo-Pair VideoDocument7 paginiDEPTH MAPstereo-Pair VideoNk OsujiÎncă nu există evaluări
- Chapter 3 DroneDocument12 paginiChapter 3 DroneZero MrÎncă nu există evaluări
- DMU Fitting Simulator 2Document5 paginiDMU Fitting Simulator 2Massai JonathonÎncă nu există evaluări
- Development of Automatic Welding and Inspecting System Using Machine Vision System For Nuts Welded On The Support HingeDocument7 paginiDevelopment of Automatic Welding and Inspecting System Using Machine Vision System For Nuts Welded On The Support HingetheijesÎncă nu există evaluări
- Approach For Implementing Object-Oriented Real-Time Models On Top of Embedded TargetsDocument7 paginiApproach For Implementing Object-Oriented Real-Time Models On Top of Embedded Targetsanandkumarrs6Încă nu există evaluări
- 0 Brecher-Witt2009 Article InteractiveAnalysisOfTheStructDocument7 pagini0 Brecher-Witt2009 Article InteractiveAnalysisOfTheStructЕвгений РомановичÎncă nu există evaluări
- Robot VisionDocument6 paginiRobot VisionHaydee Tu Ya SabesÎncă nu există evaluări
- The "UML Profile For Schedulability, Performance and Time" in The Schedulability Analysis and Modeling of Real-Time Distributed SystemsDocument4 paginiThe "UML Profile For Schedulability, Performance and Time" in The Schedulability Analysis and Modeling of Real-Time Distributed SystemsSatish RajÎncă nu există evaluări
- Motion Detection Application Using Web CameraDocument3 paginiMotion Detection Application Using Web CameraIlham ClinkersÎncă nu există evaluări
- Labview 3d Control Simulation Using Solidworks 3d Models 4Document4 paginiLabview 3d Control Simulation Using Solidworks 3d Models 4Andony Castillo100% (1)
- Simulation: Chapter - 13Document10 paginiSimulation: Chapter - 13JankiÎncă nu există evaluări
- UML-Based Integration Testing: Jean Hartmann Claudio Imoberdorf Michael MeisingerDocument11 paginiUML-Based Integration Testing: Jean Hartmann Claudio Imoberdorf Michael Meisingerصالح الشهرانيÎncă nu există evaluări
- Mech Analyzer User ManualDocument15 paginiMech Analyzer User Manualteena kumariÎncă nu există evaluări
- V-Rep. Presentation 10: Calculation ModulesDocument34 paginiV-Rep. Presentation 10: Calculation ModulesClaudiu MinaÎncă nu există evaluări
- V-Rep. Presentation 10: Calculation ModulesDocument34 paginiV-Rep. Presentation 10: Calculation ModulesClaudiu MinaÎncă nu există evaluări
- Model-Based Development of Multi-Disciplinary Systems: White PaperDocument5 paginiModel-Based Development of Multi-Disciplinary Systems: White PaperAdarshKumarÎncă nu există evaluări
- Vehicle Insurance Damage DetectionDocument6 paginiVehicle Insurance Damage DetectionIJRASETPublicationsÎncă nu există evaluări
- Analysis and Modelling of Rotational Systems With The Modyfit ApplicationDocument8 paginiAnalysis and Modelling of Rotational Systems With The Modyfit ApplicationAlfredo ZepedaÎncă nu există evaluări
- Towards A Generic Simulator For Continuum Robot Control: October 2018Document3 paginiTowards A Generic Simulator For Continuum Robot Control: October 2018AkshyaÎncă nu există evaluări
- Vlaming 2008 HIFDocument42 paginiVlaming 2008 HIFCesar EdgardoÎncă nu există evaluări
- Diccionario de FoucaultDocument6 paginiDiccionario de FoucaultSarah SimpsonÎncă nu există evaluări
- Motions Simulation 2010 ENG FINALDocument16 paginiMotions Simulation 2010 ENG FINALLorenzoÎncă nu există evaluări
- Behav Plan RepDocument7 paginiBehav Plan RepSamir BachirÎncă nu există evaluări
- Low Cost Motion CaptureDocument5 paginiLow Cost Motion CaptureioscherzoÎncă nu există evaluări
- 11 - Chapter 2Document25 pagini11 - Chapter 2Fatima H. FakhriÎncă nu există evaluări
- Published PaperDocument4 paginiPublished PaperJeeteshkumar TiwariÎncă nu există evaluări
- A Practical Approach For Model Based Slicing: Rupinder Singh, Vinay AroraDocument9 paginiA Practical Approach For Model Based Slicing: Rupinder Singh, Vinay AroraInternational Organization of Scientific Research (IOSR)Încă nu există evaluări
- Tangible Interfaces For Interactive Flow SimulationDocument8 paginiTangible Interfaces For Interactive Flow Simulationanon_60788186Încă nu există evaluări
- Mcsullog,+10 21791IJEMS 2020 2 35Document15 paginiMcsullog,+10 21791IJEMS 2020 2 35Yasar KhanÎncă nu există evaluări
- A Shadow Handler in A Video-Based Real-Time Monitoring SystemDocument8 paginiA Shadow Handler in A Video-Based Real-Time Monitoring SystemBasilÎncă nu există evaluări
- Design and Simulation of Component-Based Manufacturing Machine SystemsDocument20 paginiDesign and Simulation of Component-Based Manufacturing Machine SystemsMosharraf HossainÎncă nu există evaluări
- Zone Theory Applied To Boost Recognition Rate of HMM Based SystemDocument7 paginiZone Theory Applied To Boost Recognition Rate of HMM Based SystemInternational Association of Scientific Innovations and Research (IASIR)Încă nu există evaluări
- Traffic Load Computation Using Matlab Simulink Model Blockset1Document6 paginiTraffic Load Computation Using Matlab Simulink Model Blockset1raghavÎncă nu există evaluări
- Cycloidal TrajectorysimulinkDocument8 paginiCycloidal TrajectorysimulinkUNsha bee komÎncă nu există evaluări
- Labcomp Part1 MdsDocument13 paginiLabcomp Part1 MdsPham LongÎncă nu există evaluări
- Background Differencing Algorithm For Moving Object Detection Using System Generator HWSW Co-SimulationDocument4 paginiBackground Differencing Algorithm For Moving Object Detection Using System Generator HWSW Co-SimulationInternational Journal of Research in Engineering and TechnologyÎncă nu există evaluări
- Uni Wuppertal Bachelor Thesis FormatDocument7 paginiUni Wuppertal Bachelor Thesis Formatheatherreimerpeoria100% (2)
- A Multi-State Constraint Kalman FilterDocument8 paginiA Multi-State Constraint Kalman Filteradeelakram03Încă nu există evaluări
- Object Model Shape Model: The Lecture ContainsDocument4 paginiObject Model Shape Model: The Lecture ContainsAdeoti OladapoÎncă nu există evaluări
- 1993 Virtual MechanicsDocument29 pagini1993 Virtual MechanicsChevalier De BalibariÎncă nu există evaluări
- Noskievic 2020Document5 paginiNoskievic 2020Vahap Eyüp DOĞANÎncă nu există evaluări
- Anthropomorphic Robotic Arms - Practice and SimulationDocument5 paginiAnthropomorphic Robotic Arms - Practice and SimulationbugraerginÎncă nu există evaluări
- Analysis and Characterization of Dendrite Structures From Microstructure Images of Material PDFDocument5 paginiAnalysis and Characterization of Dendrite Structures From Microstructure Images of Material PDFesatjournalsÎncă nu există evaluări
- An Efficient Information Retrieval Ontology System Based Indexing For Context PDFDocument7 paginiAn Efficient Information Retrieval Ontology System Based Indexing For Context PDFesatjournalsÎncă nu există evaluări
- Analytical Assessment On Progressive Collapse Potential of New Reinforced Concrete Framed Structure PDFDocument5 paginiAnalytical Assessment On Progressive Collapse Potential of New Reinforced Concrete Framed Structure PDFesatjournalsÎncă nu există evaluări
- Analysis of Outrigger System For Tall Vertical Irregularites Structures Subjected To Lateral Loads PDFDocument5 paginiAnalysis of Outrigger System For Tall Vertical Irregularites Structures Subjected To Lateral Loads PDFesatjournalsÎncă nu există evaluări
- An Improved Geo-Encryption Algorithm in Location Based Services PDFDocument4 paginiAn Improved Geo-Encryption Algorithm in Location Based Services PDFesatjournalsÎncă nu există evaluări
- A Study and Survey On Various Progressive Duplicate Detection MechanismsDocument3 paginiA Study and Survey On Various Progressive Duplicate Detection MechanismsesatjournalsÎncă nu există evaluări
- Analysis and Optimization of Electrodes For Improving The Performance of Ring Laser Gyro PDFDocument4 paginiAnalysis and Optimization of Electrodes For Improving The Performance of Ring Laser Gyro PDFesatjournalsÎncă nu există evaluări
- Analysis and Optimization of Sand Casting Defects With The Help of Artificial Neural Network PDFDocument6 paginiAnalysis and Optimization of Sand Casting Defects With The Help of Artificial Neural Network PDFesatjournalsÎncă nu există evaluări
- A Review On Fake Biometric Detection System For Various ApplicationsDocument4 paginiA Review On Fake Biometric Detection System For Various ApplicationsesatjournalsÎncă nu există evaluări
- An Octa-Core Processor With Shared Memory and Message-Passing PDFDocument10 paginiAn Octa-Core Processor With Shared Memory and Message-Passing PDFesatjournalsÎncă nu există evaluări
- A Review Paper On Smart Health Care System Using Internet of ThingsDocument5 paginiA Review Paper On Smart Health Care System Using Internet of ThingsesatjournalsÎncă nu există evaluări
- A Critical Review On Experimental Studies of Strength and Durability Properties of Fibre Reinforced Concrete Composite PDFDocument7 paginiA Critical Review On Experimental Studies of Strength and Durability Properties of Fibre Reinforced Concrete Composite PDFesatjournalsÎncă nu există evaluări
- A Review On Fake Biometric Detection System For Various ApplicationsDocument4 paginiA Review On Fake Biometric Detection System For Various ApplicationsesatjournalsÎncă nu există evaluări
- A New Type of Single-Mode Lma Photonic Crystal Fiber Based On Index-Matching Coupling PDFDocument8 paginiA New Type of Single-Mode Lma Photonic Crystal Fiber Based On Index-Matching Coupling PDFesatjournalsÎncă nu există evaluări
- A Comparative Investigation On Physical and Mechanical Properties of MMC Reinforced With Waste Materials PDFDocument7 paginiA Comparative Investigation On Physical and Mechanical Properties of MMC Reinforced With Waste Materials PDFesatjournalsÎncă nu există evaluări
- I JR Et 20160503007dfceDocument5 paginiI JR Et 20160503007dfcegtarun22guptaÎncă nu există evaluări
- A Servey On Wireless Mesh Networking ModuleDocument5 paginiA Servey On Wireless Mesh Networking ModuleesatjournalsÎncă nu există evaluări
- I JR Et 20160503007dfceDocument5 paginiI JR Et 20160503007dfcegtarun22guptaÎncă nu există evaluări
- A Review Paper On Smart Health Care System Using Internet of ThingsDocument5 paginiA Review Paper On Smart Health Care System Using Internet of ThingsesatjournalsÎncă nu există evaluări
- A Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemDocument8 paginiA Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemesatjournalsÎncă nu există evaluări
- A Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemDocument8 paginiA Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemesatjournalsÎncă nu există evaluări
- A Survey On Identification of Ranking Fraud For Mobile ApplicationsDocument6 paginiA Survey On Identification of Ranking Fraud For Mobile ApplicationsesatjournalsÎncă nu există evaluări
- A Servey On Wireless Mesh Networking ModuleDocument5 paginiA Servey On Wireless Mesh Networking ModuleesatjournalsÎncă nu există evaluări
- A Women Secure Mobile App For Emergency Usage (Go Safe App)Document3 paginiA Women Secure Mobile App For Emergency Usage (Go Safe App)esatjournalsÎncă nu există evaluări
- A Survey On Identification of Ranking Fraud For Mobile ApplicationsDocument6 paginiA Survey On Identification of Ranking Fraud For Mobile ApplicationsesatjournalsÎncă nu există evaluări
- Ad Hoc Based Vehcular Networking and ComputationDocument3 paginiAd Hoc Based Vehcular Networking and ComputationesatjournalsÎncă nu există evaluări
- A Three-Level Disposal Site Selection Criteria System For Toxic and Hazardous Wastes in The PhilippinesDocument9 paginiA Three-Level Disposal Site Selection Criteria System For Toxic and Hazardous Wastes in The PhilippinesesatjournalsÎncă nu există evaluări
- Optimization of A Plant Layout and Materials Handling System For A Furniture Manufacturing CompanyDocument6 paginiOptimization of A Plant Layout and Materials Handling System For A Furniture Manufacturing Companyashti gosineÎncă nu există evaluări
- 10 INSIGHT - 2023 - D SouzaDocument7 pagini10 INSIGHT - 2023 - D SouzazhaobingÎncă nu există evaluări
- ENVIROMATICS03 - Environmental SamplingDocument25 paginiENVIROMATICS03 - Environmental Samplingaureo_lenin3268Încă nu există evaluări
- Guidance and ControlDocument68 paginiGuidance and ControldeepsoulÎncă nu există evaluări
- Playstation Rehabilitation PDFDocument8 paginiPlaystation Rehabilitation PDFVivek Edamuriyil RamesanÎncă nu există evaluări
- How To Run Behavioural Experiments Online Best Practice SuggestionsDocument21 paginiHow To Run Behavioural Experiments Online Best Practice Suggestionslu luburyÎncă nu există evaluări
- Better Data. Better Outcomes.: Expect More... ... Your Patients DoDocument5 paginiBetter Data. Better Outcomes.: Expect More... ... Your Patients DoDaniel BañuelosÎncă nu există evaluări
- Chapter 14 ArticleDocument16 paginiChapter 14 ArticlemohamedÎncă nu există evaluări
- TR Masonry NC IIDocument68 paginiTR Masonry NC IIJoel MilanÎncă nu există evaluări
- Exploring Hazard and Risk in Electrical Installation and Maintenance ORIGINALDocument25 paginiExploring Hazard and Risk in Electrical Installation and Maintenance ORIGINALReymar PusaÎncă nu există evaluări
- RCPWAVE Versi NEMOSDocument20 paginiRCPWAVE Versi NEMOSItto SamulanoÎncă nu există evaluări
- Simulation and Timing in VHDL: EE 595 EDA / ASIC Design LabDocument15 paginiSimulation and Timing in VHDL: EE 595 EDA / ASIC Design LabbijoiuuÎncă nu există evaluări
- Modelling of A Gas Absorption Packed ColDocument9 paginiModelling of A Gas Absorption Packed ColRavinder WanchooÎncă nu există evaluări
- Kosslyn and Schwartz (1977)Document31 paginiKosslyn and Schwartz (1977)marchenoiredÎncă nu există evaluări
- BSC307C Technical Individual Project Proposal TemplateDocument4 paginiBSC307C Technical Individual Project Proposal TemplateKolyo RoydevÎncă nu există evaluări
- Revised Time Table: Iv B.Tech Ii Semester (R10) Regular Examinations - April/May, 2014 TIME: 10.00 AM TO 01.00 PMDocument6 paginiRevised Time Table: Iv B.Tech Ii Semester (R10) Regular Examinations - April/May, 2014 TIME: 10.00 AM TO 01.00 PMSateesh BhanuÎncă nu există evaluări
- BS2015 UWG KendallSquareDocument8 paginiBS2015 UWG KendallSquareMarina RivosecchiÎncă nu există evaluări
- Session 1Document4 paginiSession 1Vidhi VermaÎncă nu există evaluări
- 3-D Finite Element Process Simulation of Micro-End Milling Ti-6Al-4VDocument18 pagini3-D Finite Element Process Simulation of Micro-End Milling Ti-6Al-4Vnishanth124acharyaÎncă nu există evaluări
- Modelacion UreaDocument20 paginiModelacion UreaJesus Enrique Alfonzo RiveroÎncă nu există evaluări
- Development of A Training Program in Lean ManufacturingDocument8 paginiDevelopment of A Training Program in Lean ManufacturingThảo HươngÎncă nu există evaluări
- ProModel User Guide PDFDocument656 paginiProModel User Guide PDFdavidÎncă nu există evaluări
- Cusat MCA Syllubus - 2012Document46 paginiCusat MCA Syllubus - 2012shijinbgopalÎncă nu există evaluări
- CMG ImexDocument6 paginiCMG ImexvajrahastaÎncă nu există evaluări