S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Uplink HARQ For Distributed and Cloud RAN Via Separation of Control and Data PlanesDocument27 paginiUplink HARQ For Distributed and Cloud RAN Via Separation of Control and Data Planesgame___overÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Checkpoint Services: Application Program InterfaceDocument17 paginiCheckpoint Services: Application Program Interfacegame___overÎncă nu există evaluări
- Wireless Parking SysDocument2 paginiWireless Parking Systmm_lalyÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- RRM Lte V2Document117 paginiRRM Lte V2game___overÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- CC 1125Document40 paginiCC 1125game___overÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Halnxamfa Um1Document67 paginiHalnxamfa Um1game___overÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- EB748Document140 paginiEB748game___overÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- 470Document45 pagini470game___overÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Initial Access in 5G Mm-Wave Cellular NetworksDocument6 paginiInitial Access in 5G Mm-Wave Cellular Networksgame___overÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- 罗兰贝格ppt工具Document247 pagini罗兰贝格ppt工具game___overÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- 4a0Document68 pagini4a0game___overÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Smaller, Faster, Better - More Efficient Code For Embedded SystemsDocument1 paginăSmaller, Faster, Better - More Efficient Code For Embedded Systemsgame___overÎncă nu există evaluări
- TD 101153Document9 paginiTD 101153game___overÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Openmtc: M2M Solutions For Smart Cities and The Internet of ThingsDocument7 paginiOpenmtc: M2M Solutions For Smart Cities and The Internet of Thingsgame___overÎncă nu există evaluări
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
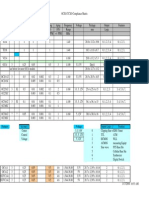
- OCXO TCXO Compliance MatrixDocument1 paginăOCXO TCXO Compliance Matrixgame___overÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- A Fast and Accurate Rayleigh Fading SimulatorDocument5 paginiA Fast and Accurate Rayleigh Fading Simulatorgame___overÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- WimaxDocument8 paginiWimaxgame___overÎncă nu există evaluări
- Aging eDocument8 paginiAging egame___overÎncă nu există evaluări
- MATLAB SuccinctlyDocument115 paginiMATLAB SuccinctlyHim24100% (1)
- 05 Challenges of LTE Advance Rel10 13Document75 pagini05 Challenges of LTE Advance Rel10 13game___overÎncă nu există evaluări
- LTE相关名词缩写集锦Document22 paginiLTE相关名词缩写集锦game___overÎncă nu există evaluări
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- Tuning C Source Code For The Blackfin Processor CompilerDocument10 paginiTuning C Source Code For The Blackfin Processor Compilergame___overÎncă nu există evaluări
- Adev1 - Allan Deviation StatisticsDocument4 paginiAdev1 - Allan Deviation Statisticsgame___overÎncă nu există evaluări
- NS3 TutorialDocument46 paginiNS3 TutorialahmedabdullaÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- 62992487994463195253491DesigningIPTVset topBoxesWithoutGettingBoxedInDocument3 pagini62992487994463195253491DesigningIPTVset topBoxesWithoutGettingBoxedIngame___overÎncă nu există evaluări
- 28F128J3ADocument58 pagini28F128J3Agame___overÎncă nu există evaluări
- Maam Ss 0017Document3 paginiMaam Ss 0017game___overÎncă nu există evaluări
- Epm3256aqc208 7Document53 paginiEpm3256aqc208 7game___overÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Virtex2器件Document302 paginiVirtex2器件game___overÎncă nu există evaluări
- Synthesis PaperDocument12 paginiSynthesis Paperapi-446695789Încă nu există evaluări
- Lec 1Document45 paginiLec 1JannoÎncă nu există evaluări
- File WSM - 0000793 - 01.pdf From Thread Scania 124L 420HPi - Opticruise - Błąd E090 I E092 PDFDocument145 paginiFile WSM - 0000793 - 01.pdf From Thread Scania 124L 420HPi - Opticruise - Błąd E090 I E092 PDFBota NicusorÎncă nu există evaluări
- ERP Stands For Enterprise Resource and PlanningDocument6 paginiERP Stands For Enterprise Resource and PlanningBhupendra MishÎncă nu există evaluări
- Basic Electrical &electronics Engineering Lab Practice Course ContentsDocument2 paginiBasic Electrical &electronics Engineering Lab Practice Course ContentsBhanoth MohanÎncă nu există evaluări
- SB 273 014 Engine Sensor Locations Nov 19 2008 1 PDFDocument4 paginiSB 273 014 Engine Sensor Locations Nov 19 2008 1 PDFImade EmadeÎncă nu există evaluări
- Case Study: Reverse Engineering FacemojiDocument16 paginiCase Study: Reverse Engineering Facemojizappergod100% (1)
- Practical 5: Identify The Business Opportunity Suitable For You. Digital Marketing: A Right Business For Youngster'sDocument5 paginiPractical 5: Identify The Business Opportunity Suitable For You. Digital Marketing: A Right Business For Youngster's02 - CM Ankita AdamÎncă nu există evaluări
- Chapter 13 The Future of InformationDocument19 paginiChapter 13 The Future of InformationKhairul bariahÎncă nu există evaluări
- ChatGPT - and - Retail - Emarketer - Q1 2023Document5 paginiChatGPT - and - Retail - Emarketer - Q1 2023Snehanshu ShahÎncă nu există evaluări
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Aci sp-215-2003Document446 paginiAci sp-215-2003Abigael Valles RamirezÎncă nu există evaluări
- R2 SignallingDocument55 paginiR2 SignallingSuman GhimireÎncă nu există evaluări
- Abb GCDocument105 paginiAbb GCMarthen TangkeÎncă nu există evaluări
- Rockwell Automation Teched ProgrammeDocument3 paginiRockwell Automation Teched ProgrammekphcmÎncă nu există evaluări
- Lead To Loan BrochureDocument4 paginiLead To Loan Brochurejoe_inbaÎncă nu există evaluări
- Significant Ships 1994Document96 paginiSignificant Ships 1994Joe Tahir100% (2)
- H.R.Steel Industries: Job Card For M 20X2.5X 155 MM Hex Bolt (HSFG)Document1 paginăH.R.Steel Industries: Job Card For M 20X2.5X 155 MM Hex Bolt (HSFG)mahesh agarwalÎncă nu există evaluări
- 700 RTU User ManualDocument81 pagini700 RTU User ManualSunny Jun PaclibarÎncă nu există evaluări
- SCAP Workshop Coursebook v2Document42 paginiSCAP Workshop Coursebook v2davodmÎncă nu există evaluări
- Power GenerationDocument32 paginiPower GenerationSachidananda SwarÎncă nu există evaluări
- 01 - IntroDocument57 pagini01 - IntroMuhamad akbarÎncă nu există evaluări
- ETFE SINGLE FILM SYSTEM SpecDocument18 paginiETFE SINGLE FILM SYSTEM SpecM. Murat ErginÎncă nu există evaluări
- ESCL-SOP-011, Design and Development ProcedureDocument8 paginiESCL-SOP-011, Design and Development Procedureadiqualityconsult100% (1)
- Normas IeeeDocument5 paginiNormas Ieeevibbora77Încă nu există evaluări
- Rycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Document67 paginiRycom Model 3121B, 3126B, 3132 Selective Levelmeter Instruction & Maintenance Manual, March 1972.Bob Laughlin, KWØRLÎncă nu există evaluări
- CAPE Physics Workshop Op Amp Workbook 2021Document45 paginiCAPE Physics Workshop Op Amp Workbook 2021KayenÎncă nu există evaluări
- Performance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDocument66 paginiPerformance Analysis of Efficient and Low Complexity MIMO-OFDM Using STBC and V-BLASTDheeksha ReddyÎncă nu există evaluări
- Sea Trial ProcedureDocument111 paginiSea Trial Procedurerp75% (4)
- 3-Channel Differential Line Driver Ic - VXDocument11 pagini3-Channel Differential Line Driver Ic - VXAlphaÎncă nu există evaluări
- AN Elastic MPLS For Service ProvidersDocument8 paginiAN Elastic MPLS For Service ProvidersChintanPandyaÎncă nu există evaluări