S-ar putea să vă placă și
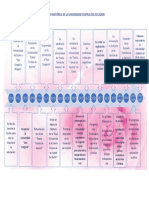
- Linea de Tiempo UCEDocument1 paginăLinea de Tiempo UCECristian ChimboÎncă nu există evaluări
- ProbabilidadDocument2 paginiProbabilidadCristian ChimboÎncă nu există evaluări
- Progresiones Aritméticas y GeometricasDocument2 paginiProgresiones Aritméticas y GeometricasCristian Chimbo50% (2)
- Desviacion EstandarDocument2 paginiDesviacion EstandarCristian ChimboÎncă nu există evaluări
- Combinatoria EjerciciosDocument2 paginiCombinatoria EjerciciosCristian ChimboÎncă nu există evaluări
- Informe 1 Micros LEDDocument6 paginiInforme 1 Micros LEDCristian ChimboÎncă nu există evaluări
- Clasificación de La EconomíaDocument4 paginiClasificación de La EconomíaCristian ChimboÎncă nu există evaluări
- Sílabo Diagnóstico Clínico 2014Document7 paginiSílabo Diagnóstico Clínico 2014Cristian ChimboÎncă nu există evaluări
- Moldeo Por InyeccionDocument16 paginiMoldeo Por Inyeccionechavez_01100% (1)
- Lista 2 Termometa 2019-2Document3 paginiLista 2 Termometa 2019-2Gonzalo AlarconÎncă nu există evaluări
- HDS 010 - Acetileno VsgaDocument5 paginiHDS 010 - Acetileno VsgaMichael GalassiÎncă nu există evaluări
- GCFCV004 Autorizacion de Valiado ConcretoDocument2 paginiGCFCV004 Autorizacion de Valiado ConcretoRosalino JimenezÎncă nu există evaluări
- Informe Dilatacion LinealDocument16 paginiInforme Dilatacion LinealCarlos VarelaÎncă nu există evaluări
- Politica Eólicas Implantacion UNIRDocument4 paginiPolitica Eólicas Implantacion UNIRameliaÎncă nu există evaluări
- Metrados ANDABAMBADocument22 paginiMetrados ANDABAMBAkevincm1448Încă nu există evaluări
- Proceso Fundición Biela MotorDocument25 paginiProceso Fundición Biela MotorDiego TrianaÎncă nu există evaluări
- Manual de Instalación, Operación y Mantenimiento A Bombas Tipo Turbina VerticalDocument20 paginiManual de Instalación, Operación y Mantenimiento A Bombas Tipo Turbina VerticalJaime Fernández50% (2)
- Manual de Operación Del Filtro Cerámico JBX6C-120 - Borrador 23042020Document62 paginiManual de Operación Del Filtro Cerámico JBX6C-120 - Borrador 23042020DJ NAKOLÎncă nu există evaluări
- Listado de Chequeo Manejo de Residuos y Demolicion de Contratistas V2Document3 paginiListado de Chequeo Manejo de Residuos y Demolicion de Contratistas V2Daniela MorenoÎncă nu există evaluări
- Equilibrio Líquido-Vapor HexanoDocument20 paginiEquilibrio Líquido-Vapor HexanoJulieth LoboÎncă nu există evaluări
- Namacurra Mapa de QuantidadesDocument40 paginiNamacurra Mapa de QuantidadesfymoreÎncă nu există evaluări
- Diplomatura PUCP - Diseño de Sistemas de Concreto para CDocument91 paginiDiplomatura PUCP - Diseño de Sistemas de Concreto para CJohn Paúl Collazos CamposÎncă nu există evaluări
- Ciclo Del AzufreDocument2 paginiCiclo Del AzufreLucy Lara Aguilar100% (1)
- Fundamentos de La Economía Social y Solidaria ANGIE CANODocument8 paginiFundamentos de La Economía Social y Solidaria ANGIE CANOAngie CaÎncă nu există evaluări
- Manual TraneDocument48 paginiManual TraneGabriel Ruelas GaxiolaÎncă nu există evaluări
- Memoria de Cálculo Estructural: Camino: Autopista Ruta 5 SurDocument29 paginiMemoria de Cálculo Estructural: Camino: Autopista Ruta 5 SurFe Sa InÎncă nu există evaluări
- 014 Planilla de Metrado Especialidad Instalaciones Sanitarias - IIDocument11 pagini014 Planilla de Metrado Especialidad Instalaciones Sanitarias - IImaxÎncă nu există evaluări
- Actividad 9 Procesos SosteniblesDocument21 paginiActividad 9 Procesos SosteniblesPATRICIA ROSARIO SANTANDER SALASÎncă nu există evaluări
- Informe 4Document4 paginiInforme 4Sebastián LÎncă nu există evaluări
- RESUMEN TEMA 1 La Materia y Los MaterialesDocument2 paginiRESUMEN TEMA 1 La Materia y Los Materialessulidi68Încă nu există evaluări
- NMX C 281 1985Document11 paginiNMX C 281 1985Gabriel Peña PèrezÎncă nu există evaluări
- Lanzamientos SONAX2020leDocument15 paginiLanzamientos SONAX2020leLuis ArcudiaÎncă nu există evaluări
- Inventario de HerramientasDocument20 paginiInventario de HerramientasRodrigo DiazÎncă nu există evaluări
- Montaje y Desmontaje de AndamiosDocument68 paginiMontaje y Desmontaje de Andamiosjesusmauellopez100% (2)
- Guias 1 y 2 Undecimo Tercer PeriodoDocument10 paginiGuias 1 y 2 Undecimo Tercer PeriodoFabian Torres NievesÎncă nu există evaluări
- Resolvemos Problemas de IgualaciónDocument3 paginiResolvemos Problemas de Igualaciónjacely oroÎncă nu există evaluări
- Trabajo de PolimerosDocument63 paginiTrabajo de PolimerosJulian Julian Castellanos88% (8)
- Sistema Estructural de AlbañileríaDocument20 paginiSistema Estructural de AlbañileríaJucelyÎncă nu există evaluări