S-ar putea să vă placă și
- EU MDR FlyerDocument12 paginiEU MDR FlyermrudhulrajÎncă nu există evaluări
- Dynamical Systems Method for Solving Nonlinear Operator EquationsDe la EverandDynamical Systems Method for Solving Nonlinear Operator EquationsEvaluare: 5 din 5 stele5/5 (1)
- GATE Questions On Laplace Transform PDFDocument6 paginiGATE Questions On Laplace Transform PDFgautamÎncă nu există evaluări
- Mathematics Integral MCQ PDFDocument11 paginiMathematics Integral MCQ PDFBilalAzamÎncă nu există evaluări
- Unit4 NumericalMethods (MCS MES MCV MME)Document10 paginiUnit4 NumericalMethods (MCS MES MCV MME)Smdniggs FuckerÎncă nu există evaluări
- Holy Cross College (Autonomous) Tiruchirappalli - 620 002 Ii B.Sc. Mathematics, Semester - Iv, April 2015 Major Elective 1: Numerical Methods Subject Code: U08MA4MET01Document9 paginiHoly Cross College (Autonomous) Tiruchirappalli - 620 002 Ii B.Sc. Mathematics, Semester - Iv, April 2015 Major Elective 1: Numerical Methods Subject Code: U08MA4MET01RobertBellarmine0% (1)
- Theoretical DistributionDocument4 paginiTheoretical DistributionAtul JhariyaÎncă nu există evaluări
- Linear FunctionalsDocument7 paginiLinear Functionalshyd arnes100% (1)
- ASYMPTOTES1Document13 paginiASYMPTOTES1hanumateÎncă nu există evaluări
- Numerical Methods T 264 Unit IV by DR N V Nagendram PDFDocument36 paginiNumerical Methods T 264 Unit IV by DR N V Nagendram PDFOpeyemi OloruntegbeÎncă nu există evaluări
- Memoryless Property of Geometric DistributionDocument1 paginăMemoryless Property of Geometric DistributionSasi TheLegendÎncă nu există evaluări
- Unit 2: Numerical Methods Branches: EEE/ECE/TCE/ML/IT: Solution of Algebraic and Transcendental EquationsDocument10 paginiUnit 2: Numerical Methods Branches: EEE/ECE/TCE/ML/IT: Solution of Algebraic and Transcendental EquationsNikhil Prasanna100% (2)
- Question Bank (Multiple Choice Questions)Document33 paginiQuestion Bank (Multiple Choice Questions)A-z knowledgeÎncă nu există evaluări
- Chebyshev Collocation Method For Differential EquationsDocument12 paginiChebyshev Collocation Method For Differential EquationsRyan GuevaraÎncă nu există evaluări
- MC Question - Solution CH 05.05 Spline Method PDFDocument8 paginiMC Question - Solution CH 05.05 Spline Method PDFMaximiliano FaríaÎncă nu există evaluări
- Iem MCQ PDFDocument28 paginiIem MCQ PDFĀditya SonāvanéÎncă nu există evaluări
- FRPDocument463 paginiFRParunavarayÎncă nu există evaluări
- DSP EC 2302 16 Mark QuestionsDocument3 paginiDSP EC 2302 16 Mark QuestionsVenkat RamananÎncă nu există evaluări
- Chapter 2: Mathematical Modelling of Translational Mechanical SystemDocument8 paginiChapter 2: Mathematical Modelling of Translational Mechanical SystemNoor Nadiah Mohd Azali100% (1)
- 18mat41 Module 2Document32 pagini18mat41 Module 2M.A rajaÎncă nu există evaluări
- 18mab102t TutorialDocument2 pagini18mab102t TutorialRohan MohataÎncă nu există evaluări
- Unit-2 Vector Calculus NotesDocument28 paginiUnit-2 Vector Calculus NotesRam SinghÎncă nu există evaluări
- MCQ Unit 6Document7 paginiMCQ Unit 6shaik moulaliÎncă nu există evaluări
- DM Important Questions-1Document3 paginiDM Important Questions-1Sudhakar reddyÎncă nu există evaluări
- Analytical Solutions For The Flow of Carreau and Cross Fluids in Circular Pipes and Thin SlitsDocument27 paginiAnalytical Solutions For The Flow of Carreau and Cross Fluids in Circular Pipes and Thin SlitsTaha SochiÎncă nu există evaluări
- Lecture 3 - InterpolationDocument39 paginiLecture 3 - InterpolationChelsie Patricia Demonteverde MirandaÎncă nu există evaluări
- Module IV (QB)Document10 paginiModule IV (QB)sudheshÎncă nu există evaluări
- MPPET 2010: MathematicsDocument14 paginiMPPET 2010: MathematicsRishabh SinghÎncă nu există evaluări
- Engineering Mathematics III Important University Questions Unit I Fourier Series Two MarksDocument23 paginiEngineering Mathematics III Important University Questions Unit I Fourier Series Two MarksNitish Rajani Chunilal MethaÎncă nu există evaluări
- Waveform Synthesis Using Laplace TransformDocument3 paginiWaveform Synthesis Using Laplace Transformkvamsee112Încă nu există evaluări
- Multiple-Choice Test Newton's Divided Difference Polynomial Method InterpolationDocument7 paginiMultiple-Choice Test Newton's Divided Difference Polynomial Method InterpolationGnanarajÎncă nu există evaluări
- Calculation of Pi Using The Monte Carlo MethodDocument12 paginiCalculation of Pi Using The Monte Carlo MethodTigerHATSÎncă nu există evaluări
- Tpde MCQDocument44 paginiTpde MCQPRANAY BABUÎncă nu există evaluări
- SRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Document3 paginiSRM Institute of Science & Technology - Academic Curricula (2018 Regulations)Geetha AnbazhaganÎncă nu există evaluări
- VHDL Code For FilterDocument2 paginiVHDL Code For FilterArkadip GhoshÎncă nu există evaluări
- A. Digital Signal ProcessingDocument38 paginiA. Digital Signal ProcessingAbhishek PandeyÎncă nu există evaluări
- Matched Asymptotic Expansion Solution5Document7 paginiMatched Asymptotic Expansion Solution5Michael James Miller100% (1)
- Special Function M4Document12 paginiSpecial Function M4Vishwas PC100% (1)
- Unit - 1 - Two Mark QuestionsDocument3 paginiUnit - 1 - Two Mark QuestionsRustEdÎncă nu există evaluări
- APGENCO Assistant Engineers Electrical 2012 Paper With KeyDocument5 paginiAPGENCO Assistant Engineers Electrical 2012 Paper With KeyRakesh MohanachandranÎncă nu există evaluări
- Bs-III Diff Geo Mcqs With AnsDocument5 paginiBs-III Diff Geo Mcqs With AnsFahad Khan100% (1)
- Differentiation Under Integral SignDocument21 paginiDifferentiation Under Integral Signap021100% (1)
- Module 2 - Complex IntegrationDocument43 paginiModule 2 - Complex IntegrationRathnaÎncă nu există evaluări
- Maths II FormulasDocument13 paginiMaths II Formulaskr_padmavathiÎncă nu există evaluări
- Bilinear InterpolationDocument4 paginiBilinear InterpolationSridhar PanneerÎncă nu există evaluări
- Discrete Time Fourier Transform (DTFT) & Discrete Fourier TransformDocument41 paginiDiscrete Time Fourier Transform (DTFT) & Discrete Fourier TransformekmemonÎncă nu există evaluări
- DifferentialDocument15 paginiDifferentialSavita KaswanÎncă nu există evaluări
- L01 LCCDE - Direct MethodDocument30 paginiL01 LCCDE - Direct MethodYohan ManaligodÎncă nu există evaluări
- Mathematics: B.Sc. Sem-5Document15 paginiMathematics: B.Sc. Sem-5Saddam HusainÎncă nu există evaluări
- Couette Flow Analytical and Numerical SolutionDocument5 paginiCouette Flow Analytical and Numerical SolutionRasikh TariqÎncă nu există evaluări
- 3assignment SolDocument7 pagini3assignment SolDalghak KhanÎncă nu există evaluări
- Sheetal 202890 PPT Integral Equation and Calculus of VariationsDocument13 paginiSheetal 202890 PPT Integral Equation and Calculus of Variations18 princy kaushikÎncă nu există evaluări
- Chap 3 Vectors ECDocument12 paginiChap 3 Vectors ECMidhun BabuÎncă nu există evaluări
- Laplace Transform of IntegralDocument3 paginiLaplace Transform of IntegralAshutosh SinghÎncă nu există evaluări
- DM AllDocument1.731 paginiDM Alllucy annÎncă nu există evaluări
- 24.3.6 - Variation of Parameters Second OrderDocument11 pagini24.3.6 - Variation of Parameters Second Orderanon_422073337Încă nu există evaluări
- Numericals Question PaperDocument13 paginiNumericals Question PaperSudipta MondalÎncă nu există evaluări
- Legendre Polynomials PDFDocument3 paginiLegendre Polynomials PDFAmalVijayÎncă nu există evaluări
- Solving ODE-BVP Using The Galerkin's MethodDocument14 paginiSolving ODE-BVP Using The Galerkin's MethodSuddhasheel Basabi GhoshÎncă nu există evaluări
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceDe la EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissÎncă nu există evaluări
- Ledger PDFDocument1 paginăLedger PDFhafizrahimmitÎncă nu există evaluări
- Tour Schedule (S5Eee) : Tour To - COORG-MYSORUDocument1 paginăTour Schedule (S5Eee) : Tour To - COORG-MYSORUhafizrahimmitÎncă nu există evaluări
- Infra: Customer Signature With SealDocument1 paginăInfra: Customer Signature With SealhafizrahimmitÎncă nu există evaluări
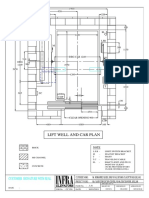
- Infra: Lift Well and Car PlanDocument1 paginăInfra: Lift Well and Car PlanhafizrahimmitÎncă nu există evaluări
- KODIYATTUDocument1 paginăKODIYATTUhafizrahimmitÎncă nu există evaluări
- TKM Institute of Technology: Lecture PlanDocument3 paginiTKM Institute of Technology: Lecture PlanhafizrahimmitÎncă nu există evaluări
- Electrical PDFDocument4 paginiElectrical PDFhafizrahimmitÎncă nu există evaluări
- Infra: Lift SpecificationsDocument1 paginăInfra: Lift SpecificationshafizrahimmitÎncă nu există evaluări
- Application For Renewal of Electrical Contractor LicenceDocument1 paginăApplication For Renewal of Electrical Contractor LicencehafizrahimmitÎncă nu există evaluări
- KODIYATUDocument1 paginăKODIYATUhafizrahimmitÎncă nu există evaluări
- Tour Report s8Document2 paginiTour Report s8hafizrahimmitÎncă nu există evaluări
- First Name Second Name E Mail Id Talia Jude Reshma VP Haripriya S Anjali A Sambhu Mohan Jaisal ThomasDocument1 paginăFirst Name Second Name E Mail Id Talia Jude Reshma VP Haripriya S Anjali A Sambhu Mohan Jaisal ThomashafizrahimmitÎncă nu există evaluări
- Electrical Machines LaboratoryDocument3 paginiElectrical Machines LaboratoryhafizrahimmitÎncă nu există evaluări
- Maintain Your Hot EquipmentDocument2 paginiMaintain Your Hot EquipmenthafizrahimmitÎncă nu există evaluări
- TKM Institute of Technology, Karuvelil Department of Computer Sceince & Engineering S7 CSE (2013-2017) BATCHDocument4 paginiTKM Institute of Technology, Karuvelil Department of Computer Sceince & Engineering S7 CSE (2013-2017) BATCHhafizrahimmitÎncă nu există evaluări
- SUB: Permission For Displaying FlexDocument1 paginăSUB: Permission For Displaying FlexhafizrahimmitÎncă nu există evaluări
- Vaibhav: RJ HuntDocument3 paginiVaibhav: RJ HunthafizrahimmitÎncă nu există evaluări
- Proposal s8Document1 paginăProposal s8hafizrahimmitÎncă nu există evaluări
- Roll List S2 ECDocument11 paginiRoll List S2 EChafizrahimmitÎncă nu există evaluări
- Study of The Further Reduction of Shaft Voltage of Brushless DC Motor With Insulated Rotor Driven by PWM InverterDocument6 paginiStudy of The Further Reduction of Shaft Voltage of Brushless DC Motor With Insulated Rotor Driven by PWM InverterhafizrahimmitÎncă nu există evaluări
- TKM Institute of Technology: Karuvelil.P.O, KollamDocument1 paginăTKM Institute of Technology: Karuvelil.P.O, KollamhafizrahimmitÎncă nu există evaluări
- S 8 EiDocument11 paginiS 8 EihafizrahimmitÎncă nu există evaluări
- Q MeterDocument2 paginiQ MeterhafizrahimmitÎncă nu există evaluări
- Mechanical s2 Roll ListDocument2 paginiMechanical s2 Roll ListhafizrahimmitÎncă nu există evaluări
- HT 2 Hallticket PDFDocument2 paginiHT 2 Hallticket PDFhafizrahimmitÎncă nu există evaluări
- TH THDocument1 paginăTH THhafizrahimmitÎncă nu există evaluări
- Vaibhav RJ Hunt15Document4 paginiVaibhav RJ Hunt15hafizrahimmitÎncă nu există evaluări
- Technical Assistant (Metal and Plastic Workshop) : Skill SheetDocument2 paginiTechnical Assistant (Metal and Plastic Workshop) : Skill SheethafizrahimmitÎncă nu există evaluări
- North ERN Technical L.L.C.: (Industrial Supply Division)Document1 paginăNorth ERN Technical L.L.C.: (Industrial Supply Division)hafizrahimmitÎncă nu există evaluări
- 03 Zero Emissions and Eco-Town in KawasakiDocument21 pagini03 Zero Emissions and Eco-Town in KawasakiAlwi AmarÎncă nu există evaluări
- Computation of Total Income: Zenit - A KDK Software Software ProductDocument2 paginiComputation of Total Income: Zenit - A KDK Software Software ProductKartik RajputÎncă nu există evaluări
- Fashion Law - Trademark ParodyDocument12 paginiFashion Law - Trademark ParodyArinta PratiwiÎncă nu există evaluări
- School MemoDocument1 paginăSchool MemoBellaÎncă nu există evaluări
- 24th SFCON Parallel Sessions Schedule (For Souvenir Program)Document1 pagină24th SFCON Parallel Sessions Schedule (For Souvenir Program)genesistorres286Încă nu există evaluări
- OEM - Fuel Manager Brand Cross Reference P/Ns For Service Filter Elements 99642 - January 2006Document6 paginiOEM - Fuel Manager Brand Cross Reference P/Ns For Service Filter Elements 99642 - January 2006Miguel RojasÎncă nu există evaluări
- Precision Probability Index (Elf)Document20 paginiPrecision Probability Index (Elf)EdsonnSPBrÎncă nu există evaluări
- GSP Product Info 092711Document19 paginiGSP Product Info 092711Joao SilvaÎncă nu există evaluări
- Ebook Principles of Corporate Finance PDF Full Chapter PDFDocument67 paginiEbook Principles of Corporate Finance PDF Full Chapter PDFmichelle.haas303100% (28)
- AloraDocument3 paginiAloraTatu AradiÎncă nu există evaluări
- Soal Ujian SmaDocument26 paginiSoal Ujian SmaAyu RiskyÎncă nu există evaluări
- Ojsadmin, 12 ZhangG 19Document14 paginiOjsadmin, 12 ZhangG 19Kristel MitraÎncă nu există evaluări
- PDF of Proposed Museum ProjectDocument145 paginiPDF of Proposed Museum ProjectHarshita ParnamiÎncă nu există evaluări
- The Cycle of Leadership Through Transformational, Eccles - (Leadership) PDFDocument16 paginiThe Cycle of Leadership Through Transformational, Eccles - (Leadership) PDFEliana LopezÎncă nu există evaluări
- Regulator With NRVDocument2 paginiRegulator With NRVBiswanath LenkaÎncă nu există evaluări
- Diodat PDFDocument4 paginiDiodat PDFFatmir KelmendiÎncă nu există evaluări
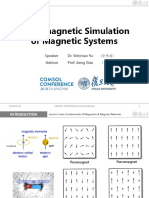
- Micromagnetic Simulation of Magnetic SystemsDocument12 paginiMicromagnetic Simulation of Magnetic SystemsImri SsÎncă nu există evaluări
- A Flight Plan in 10 StepsDocument4 paginiA Flight Plan in 10 StepsThar LattÎncă nu există evaluări
- Unclaimed Abandoned Vehicles Feb 2022Document66 paginiUnclaimed Abandoned Vehicles Feb 2022kumar himanshuÎncă nu există evaluări
- Me Con Compressed Air SystemsDocument8 paginiMe Con Compressed Air SystemsesvwestÎncă nu există evaluări
- Chapter 9 CompensationDocument24 paginiChapter 9 CompensationSophie CheungÎncă nu există evaluări
- Sony Ericsson Secret MenuDocument2 paginiSony Ericsson Secret MenuZeljana MaksicÎncă nu există evaluări
- Daftar Kalibrasi Peralatan MedisDocument34 paginiDaftar Kalibrasi Peralatan Medisdiklat rssnÎncă nu există evaluări
- Canon IR2016J Error Code ListDocument4 paginiCanon IR2016J Error Code ListZahidShaikhÎncă nu există evaluări
- GB Programme Chart: A B C D J IDocument2 paginiGB Programme Chart: A B C D J IRyan MeltonÎncă nu există evaluări
- OBLICONDocument13 paginiOBLICONZARAÎncă nu există evaluări
- Zintek® 300 HP + Techseal® Glossy Black SLDocument9 paginiZintek® 300 HP + Techseal® Glossy Black SLSyedMazharAliShahÎncă nu există evaluări
- Arti ResearchDocument10 paginiArti Researcharti nongbetÎncă nu există evaluări