S-ar putea să vă placă și
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Mountain RangeDocument5 paginiMountain RangeAnonymous E4Rbo2sÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Jerky: Jerky Is Lean Trimmed Meat That Has Been Cut Into StripsDocument6 paginiJerky: Jerky Is Lean Trimmed Meat That Has Been Cut Into StripsAnonymous E4Rbo2sÎncă nu există evaluări
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Sierra Morena: Central Plateau and Providing The Watershed Between The Valleys of TheDocument7 paginiSierra Morena: Central Plateau and Providing The Watershed Between The Valleys of TheAnonymous E4Rbo2sÎncă nu există evaluări
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- Jebel Musa (Morocco)Document3 paginiJebel Musa (Morocco)Anonymous E4Rbo2sÎncă nu există evaluări
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Tariq Ibn ZiyadDocument5 paginiTariq Ibn ZiyadAnonymous E4Rbo2sÎncă nu există evaluări
- Bantoid Languages PDFDocument2 paginiBantoid Languages PDFAnonymous E4Rbo2sÎncă nu există evaluări
- Adel Sedra: Adel S. Sedra Is An Egyptian Canadian Electrical Engineer andDocument4 paginiAdel Sedra: Adel S. Sedra Is An Egyptian Canadian Electrical Engineer andAnonymous E4Rbo2sÎncă nu există evaluări
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Nandi-Markweta Languages PDFDocument6 paginiNandi-Markweta Languages PDFAnonymous E4Rbo2sÎncă nu există evaluări
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Kipsigis LanguageDocument3 paginiKipsigis LanguageAnonymous E4Rbo2s100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Konakovsky District (Russian: КонакDocument7 paginiKonakovsky District (Russian: КонакAnonymous E4Rbo2sÎncă nu există evaluări
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Crumple ZoneDocument7 paginiCrumple ZoneAnonymous E4Rbo2sÎncă nu există evaluări
- Demonstrative PDFDocument8 paginiDemonstrative PDFAnonymous E4Rbo2sÎncă nu există evaluări
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Cephalopod LimbDocument9 paginiCephalopod LimbAnonymous E4Rbo2sÎncă nu există evaluări
- Eispack: DocumentationDocument1 paginăEispack: DocumentationAnonymous E4Rbo2sÎncă nu există evaluări
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Class (Computer Programming)Document12 paginiClass (Computer Programming)Anonymous E4Rbo2sÎncă nu există evaluări
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (345)
- Function OverloadingDocument4 paginiFunction OverloadingAnonymous E4Rbo2sÎncă nu există evaluări
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- Cleve MolerDocument2 paginiCleve MolerAnonymous E4Rbo2sÎncă nu există evaluări
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
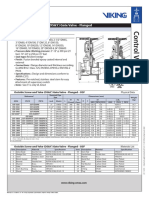
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 paginiOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoÎncă nu există evaluări
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Writer Keyboard Shortcuts CheatsheetDocument1 paginăWriter Keyboard Shortcuts CheatsheetBrian100% (3)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- TK-C Transmitter PDFDocument4 paginiTK-C Transmitter PDFGopal HegdeÎncă nu există evaluări
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- DNF Stand PipeDocument3 paginiDNF Stand PipeChristopher BrownÎncă nu există evaluări
- AY 2015-16cvbbnjDocument245 paginiAY 2015-16cvbbnjSyed Abdul AzizÎncă nu există evaluări
- Oracle Exadata Technical Series: Smart ScanDocument59 paginiOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaÎncă nu există evaluări
- Up-F-020 Solicitud de Admisión de Practicantes Ver-08Document108 paginiUp-F-020 Solicitud de Admisión de Practicantes Ver-08MARCOS RODOLFO MALDONADO ZEVALLOSÎncă nu există evaluări
- Email TMK88065 PDFDocument3 paginiEmail TMK88065 PDFlily_ng3642Încă nu există evaluări
- Caustic CrackingDocument17 paginiCaustic CrackingDurga PrasadÎncă nu există evaluări
- Handling Tickets Is Called Issue Tracking System.: Sap SDDocument6 paginiHandling Tickets Is Called Issue Tracking System.: Sap SDNaveen KumarÎncă nu există evaluări
- ManualDocument9 paginiManualRonit DattaÎncă nu există evaluări
- 16PPE723Document2 pagini16PPE723DrArun KaliappanÎncă nu există evaluări
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- US Hex Bolt SizesDocument2 paginiUS Hex Bolt SizesYana Jarang OlÎncă nu există evaluări
- Fracture in Concrete and Reinforced ConcreteDocument23 paginiFracture in Concrete and Reinforced ConcreteNilay GandhiÎncă nu există evaluări
- 1010 Tire ChangerDocument4 pagini1010 Tire ChangerReyes Cesar33% (3)
- Production ManagementDocument81 paginiProduction ManagementrrathoreÎncă nu există evaluări
- Flight DynamicsDocument57 paginiFlight DynamicsDexto100% (2)
- 91 194 DCDocument57 pagini91 194 DCGusdeluxeÎncă nu există evaluări
- db2v9 EsqlDocument419 paginidb2v9 EsqlRaphael PugliesiÎncă nu există evaluări
- PDFDocument255 paginiPDFwrite2arshad_mÎncă nu există evaluări
- Lab Gas FlowmeterDocument7 paginiLab Gas Flowmeterazym94Încă nu există evaluări
- Pakistani Radio MarketDocument72 paginiPakistani Radio MarketNajeeb Anwar100% (1)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Extended End-Plate Stiffener PDFDocument2 paginiExtended End-Plate Stiffener PDFaams_sÎncă nu există evaluări
- EST 2011B v1.0 Configuration 10/28/2018 7:43 AMDocument2 paginiEST 2011B v1.0 Configuration 10/28/2018 7:43 AMbagusÎncă nu există evaluări
- 3500 91 Egd Communication Gateway Module Datasheet 0Document6 pagini3500 91 Egd Communication Gateway Module Datasheet 0dikastaloneÎncă nu există evaluări
- Chapter - I: Hydro DriveDocument19 paginiChapter - I: Hydro Drivekuldeep ududholiraÎncă nu există evaluări
- Method Statement UnitizedDocument22 paginiMethod Statement Unitizedifeanyi EmmanuelÎncă nu există evaluări
- UAMDocument35 paginiUAMVishnu R PuthusseryÎncă nu există evaluări
- Customizing The ADFS Sign-In PagesDocument4 paginiCustomizing The ADFS Sign-In Pagesmicu0% (1)
- Procurement Guideline For ATL SchoolsDocument4 paginiProcurement Guideline For ATL SchoolsManKapÎncă nu există evaluări
- Dark Data: Why What You Don’t Know MattersDe la EverandDark Data: Why What You Don’t Know MattersEvaluare: 4.5 din 5 stele4.5/5 (3)
- Optimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesDe la EverandOptimizing DAX: Improving DAX performance in Microsoft Power BI and Analysis ServicesÎncă nu există evaluări