S-ar putea să vă placă și
- Manual Rompe Sindrome LigaDocument12 paginiManual Rompe Sindrome Ligahvsalgadom6568Încă nu există evaluări
- 50 Verbos Con EjemploDocument51 pagini50 Verbos Con EjemploDiego AmadorÎncă nu există evaluări
- Op Calib Pendf SpanishDocument82 paginiOp Calib Pendf SpanishDiego AmadorÎncă nu există evaluări
- OpManual RS0O SpanishDocument252 paginiOpManual RS0O SpanishDiego AmadorÎncă nu există evaluări
- Manual Programacion FanucDocument186 paginiManual Programacion Fanuc1970partituras100% (5)
- Automatización Del Proceso deUTOMATIZACIÓN DEL PROCESO DE SOLDADURA PARA LA FABRICACIÓN DE MARCOS Soldadura para La Fabricación de MarcosDocument66 paginiAutomatización Del Proceso deUTOMATIZACIÓN DEL PROCESO DE SOLDADURA PARA LA FABRICACIÓN DE MARCOS Soldadura para La Fabricación de MarcosDiego AmadorÎncă nu există evaluări
- Apuntes AdmonDocument2 paginiApuntes AdmonDiego AmadorÎncă nu există evaluări
- Introduccion ALos MecanismosDocument20 paginiIntroduccion ALos MecanismosDiego AmadorÎncă nu există evaluări
- Fundamentos de La InvestigacionDocument5 paginiFundamentos de La InvestigacionDiego AmadorÎncă nu există evaluări
- Qui MicaDocument7 paginiQui MicaDiego AmadorÎncă nu există evaluări
- Beer Mecanica de Materiales 4ed SolucionarioDocument1.463 paginiBeer Mecanica de Materiales 4ed SolucionarioLuis Alfredo50% (2)
- Sesión 3° - TV - 21-04-2021Document4 paginiSesión 3° - TV - 21-04-2021leititia simarraÎncă nu există evaluări
- 4 Cancer GastricoDocument9 pagini4 Cancer GastricoJ Sebastian SepulvedaÎncă nu există evaluări
- Tarea 2 - Tecnicas - de - ConteoDocument31 paginiTarea 2 - Tecnicas - de - ConteoJulieth Tatiana HernándezÎncă nu există evaluări
- Anillo D GigesDocument12 paginiAnillo D GigesJorge Ricardo RodriguezÎncă nu există evaluări
- Pérdidas en VacioDocument4 paginiPérdidas en Vaciodaniel1994sandovalÎncă nu există evaluări
- Encuestas FcaDocument7 paginiEncuestas Fcaciencias de la administracionÎncă nu există evaluări
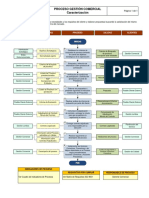
- Proceso Gestión ComercialDocument1 paginăProceso Gestión ComercialSabrina Valdivia SalcedoÎncă nu există evaluări
- La FermentacionDocument7 paginiLa FermentacionBrianna PasillasÎncă nu există evaluări
- PROCAPSDocument11 paginiPROCAPSDärly M. BarrosÎncă nu există evaluări
- Manual 12 de Octubre Medicina InternaDocument1.502 paginiManual 12 de Octubre Medicina InternaBruna Lima100% (11)
- Ejercicio de Seleccion de HerramientasDocument9 paginiEjercicio de Seleccion de HerramientasAgustinÎncă nu există evaluări
- Taller9Preparación Segundo ParcialDocument5 paginiTaller9Preparación Segundo ParcialJuan EÎncă nu există evaluări
- 2eso Lyl Es Ud04 Doc ResumenDocument3 pagini2eso Lyl Es Ud04 Doc Resumendeadcandance1968Încă nu există evaluări
- Necesidades Area de Mantenimiento Citrofrut Planta HuichihuayanDocument2 paginiNecesidades Area de Mantenimiento Citrofrut Planta HuichihuayanEduardo Molina PerezÎncă nu există evaluări
- Icipev - Taller de Titulo I - Informe 2 - SMDocument18 paginiIcipev - Taller de Titulo I - Informe 2 - SMRocio Neyra CorreaÎncă nu există evaluări
- COMIC, IPH Y C. de CUSTODIA TALLER DERECHO PENALDocument9 paginiCOMIC, IPH Y C. de CUSTODIA TALLER DERECHO PENALAngel GMartinezÎncă nu există evaluări
- Buenos Modales, Buenos Negocios - OrtografíaDocument2 paginiBuenos Modales, Buenos Negocios - OrtografíaJorge Chamaya CÎncă nu există evaluări
- Manual para Familiares PDFDocument30 paginiManual para Familiares PDFMauricio PastranaÎncă nu există evaluări
- Pasos para Crear CorrespondenciaDocument7 paginiPasos para Crear CorrespondenciaRubiiAguilaÎncă nu există evaluări
- SESION Leemos Una Receta SaludableDocument6 paginiSESION Leemos Una Receta SaludableIsabel Solano100% (1)
- Catalogo Universal de Servicios de Salud 2012 - Causes 2012 PDFDocument479 paginiCatalogo Universal de Servicios de Salud 2012 - Causes 2012 PDFDan Alejandro RMÎncă nu există evaluări
- M3 - Ti - Panificación y Control de La Producción PDFDocument4 paginiM3 - Ti - Panificación y Control de La Producción PDFLeonardo SandovalÎncă nu există evaluări
- Banco de Preguntas Lidera Utp 2'022 2Document98 paginiBanco de Preguntas Lidera Utp 2'022 2Sebastian GamarraÎncă nu există evaluări
- 0901 ErroresDocument25 pagini0901 ErroresIantosca IngenieriaÎncă nu există evaluări
- Manual y Taller PDFDocument17 paginiManual y Taller PDFJuan Fernando Blanco Calixto100% (1)
- Mapa Fin de La Vida (Informe Bioetica)Document2 paginiMapa Fin de La Vida (Informe Bioetica)brian042516Încă nu există evaluări
- Comprension y Redaccion S2.s2Document3 paginiComprension y Redaccion S2.s2Dais MirandaÎncă nu există evaluări
- Estudio Sobre La Introduccion Sinfonica de BecquerDocument10 paginiEstudio Sobre La Introduccion Sinfonica de BecquerEvaAlbernazÎncă nu există evaluări
- Karl Walther, Un Ejemplo en La Academia y en La Vida.Document29 paginiKarl Walther, Un Ejemplo en La Academia y en La Vida.nestoruyÎncă nu există evaluări
- Prueba de Hipotesis para La Varianza Poblacional: Dr. Cristobal Exebio CDocument8 paginiPrueba de Hipotesis para La Varianza Poblacional: Dr. Cristobal Exebio CJahir VCÎncă nu există evaluări
- Influencia. La psicología de la persuasiónDe la EverandInfluencia. La psicología de la persuasiónEvaluare: 4.5 din 5 stele4.5/5 (14)
- 7 tendencias digitales que cambiarán el mundoDe la Everand7 tendencias digitales que cambiarán el mundoEvaluare: 4.5 din 5 stele4.5/5 (87)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteDe la EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteEvaluare: 1 din 5 stele1/5 (1)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.De la EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Evaluare: 5 din 5 stele5/5 (1)
- Proyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadDe la EverandProyectos Arduino con Tinkercad: Diseño y programación de proyectos electrónicos basados en Arduino con TinkercadEvaluare: 5 din 5 stele5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.De la EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Evaluare: 4 din 5 stele4/5 (51)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másDe la EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másEvaluare: 2.5 din 5 stele2.5/5 (3)
- Ciberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialDe la EverandCiberseguridad: Una Simple Guía para Principiantes sobre Ciberseguridad, Redes Informáticas y Cómo Protegerse del Hacking en Forma de Phishing, Malware, Ransomware e Ingeniería SocialEvaluare: 4.5 din 5 stele4.5/5 (11)
- Guía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaDe la EverandGuía para la crianza en un mundo digital: Cómo educar para un uso sano y seguro de la tecnologíaEvaluare: 3.5 din 5 stele3.5/5 (2)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressDe la EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressEvaluare: 5 din 5 stele5/5 (1)
- EL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialDe la EverandEL MARKETING DE MANERA SENCILLA. La guía práctica sobre las estrategias básicas de mercadotecnia profesional y orientación comercialEvaluare: 4.5 din 5 stele4.5/5 (7)
- La causa raiz de los accidentes: Historias de accidentes en la industriaDe la EverandLa causa raiz de los accidentes: Historias de accidentes en la industriaEvaluare: 5 din 5 stele5/5 (1)
- Guía de cálculo y diseño de conductos para ventilación y climatizaciónDe la EverandGuía de cálculo y diseño de conductos para ventilación y climatizaciónEvaluare: 5 din 5 stele5/5 (1)
- Manual técnico para la interpretación de análisis de suelos y fertilización de cultivosDe la EverandManual técnico para la interpretación de análisis de suelos y fertilización de cultivosEvaluare: 4 din 5 stele4/5 (1)
- Design Thinking para principiantes: La innovación como factor para el éxito empresarialDe la EverandDesign Thinking para principiantes: La innovación como factor para el éxito empresarialEvaluare: 4.5 din 5 stele4.5/5 (10)
- La investigación en ingeniería: Análisis y solución de casos desde el aulaDe la EverandLa investigación en ingeniería: Análisis y solución de casos desde el aulaEvaluare: 4 din 5 stele4/5 (2)