S-ar putea să vă placă și
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (120)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Software Requirements Specification ForDocument12 paginiSoftware Requirements Specification ForzaianbÎncă nu există evaluări
- Dewi Noviyanti FitkDocument81 paginiDewi Noviyanti FitkReinaldus Aton 12118023Încă nu există evaluări
- 08 Coombes PostcolonialDocument6 pagini08 Coombes PostcolonialStergios SourlopoulosÎncă nu există evaluări
- All The Allegation Leveled Against Him Were Found To Be BaselessDocument3 paginiAll The Allegation Leveled Against Him Were Found To Be Baselesssamuel kebedeÎncă nu există evaluări
- APJDDVol1No2 ShenDocument36 paginiAPJDDVol1No2 ShenGrace Kong Yun RuiÎncă nu există evaluări
- 1 Students Booklet CESEM LV1 Semester ONE 2023Document72 pagini1 Students Booklet CESEM LV1 Semester ONE 2023Marie JulienÎncă nu există evaluări
- PragmatismDocument36 paginiPragmatismtasneemÎncă nu există evaluări
- Online Writing: Norebel Gomez-Arazo BalagulanDocument36 paginiOnline Writing: Norebel Gomez-Arazo BalagulanNo RebelÎncă nu există evaluări
- L7 Duality IDocument11 paginiL7 Duality ILauraÎncă nu există evaluări
- Food ElearningDocument12 paginiFood ElearningAnditha NugrahaniÎncă nu există evaluări
- Edith Wharton - The Age of Innocence (Webster's Thesaurus Edition) (2006) PDFDocument432 paginiEdith Wharton - The Age of Innocence (Webster's Thesaurus Edition) (2006) PDFGaniyou AdenidjiÎncă nu există evaluări
- Characteristics of A Contextual Teaching Learning ApproachDocument3 paginiCharacteristics of A Contextual Teaching Learning ApproachAnithaNitaÎncă nu există evaluări
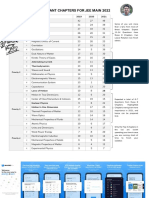
- Physics Most Important Chapters 2022Document2 paginiPhysics Most Important Chapters 2022VINOD JIÎncă nu există evaluări
- The Living Icon in Byzantium and Italy The Vita Image Eleventh To Thirteenth CenturiesDocument301 paginiThe Living Icon in Byzantium and Italy The Vita Image Eleventh To Thirteenth Centurieszoran ivkovic100% (4)
- Cae11 - Book1Document80 paginiCae11 - Book1Kristian AcolÎncă nu există evaluări
- Tito Puente-Extention FormDocument2 paginiTito Puente-Extention Formapi-550368270Încă nu există evaluări
- Example Learner Profile Chart-1Document3 paginiExample Learner Profile Chart-1api-644764368Încă nu există evaluări
- Final Year Project DocumentationDocument90 paginiFinal Year Project DocumentationMilion NugusieÎncă nu există evaluări
- Oracle Cloud Platform Application Integration Specialist: Exam ADocument19 paginiOracle Cloud Platform Application Integration Specialist: Exam AMayur Gidwani100% (2)
- Communicative ApproachDocument23 paginiCommunicative Approachpramukh_swami100% (3)
- IT Practice QuestionsDocument3 paginiIT Practice QuestionsAli RangwalaÎncă nu există evaluări
- Vam Shi ResumeDocument2 paginiVam Shi ResumeDharmapuri Shri lekhaÎncă nu există evaluări
- Quick Guide To GREP Codes in Adobe InDesign-newDocument26 paginiQuick Guide To GREP Codes in Adobe InDesign-newMark NagashÎncă nu există evaluări
- Bit3202 Internet Programming Regular Reg SuppDocument4 paginiBit3202 Internet Programming Regular Reg Suppashleykiki.keÎncă nu există evaluări
- PrayingDocument658 paginiPrayingsanselmi78Încă nu există evaluări
- Python GUI: Meher Krishna PatelDocument41 paginiPython GUI: Meher Krishna PatelPablo Antonio Ortega LuceroÎncă nu există evaluări
- Maths III Transform & Disrete PDFDocument3 paginiMaths III Transform & Disrete PDFDeepak sharmaÎncă nu există evaluări
- Selection ViewDocument351 paginiSelection ViewjitendrayadavcsÎncă nu există evaluări
- Loci in Two DimensionDocument7 paginiLoci in Two DimensionSathis KumarÎncă nu există evaluări