S-ar putea să vă placă și
- Lecture 2 Waves and Wave PropertiesDocument45 paginiLecture 2 Waves and Wave PropertiesJohn Chimoyo Jr.Încă nu există evaluări
- Total Internal ReflectionDocument9 paginiTotal Internal ReflectionVaibhav JainÎncă nu există evaluări
- Section Iv Waves: - PAGE 31Document9 paginiSection Iv Waves: - PAGE 31Tilak K CÎncă nu există evaluări
- Introduction To The Seismic Reflection Exploration MethodDocument85 paginiIntroduction To The Seismic Reflection Exploration MethodSumanyu DixitÎncă nu există evaluări
- Seismic Attributes AnalysisDocument17 paginiSeismic Attributes AnalysisSamuel CorreaÎncă nu există evaluări
- Chapter 2 Final CorrectionDocument53 paginiChapter 2 Final CorrectionOkpanachi JuliusÎncă nu există evaluări
- 10 Seismic StratigraphyDocument48 pagini10 Seismic Stratigraphyzemabder100% (2)
- Notes - Unit 8 - Waves, Sound, and LightDocument58 paginiNotes - Unit 8 - Waves, Sound, and Lightsonu4672Încă nu există evaluări
- Lesson 2 Wave PropagationDocument31 paginiLesson 2 Wave PropagationChuck LynchÎncă nu există evaluări
- c2Document18 paginic2Humbang PurbaÎncă nu există evaluări
- Total Internal ReflectionDocument12 paginiTotal Internal ReflectionHarsh WardhanÎncă nu există evaluări
- Reflection, Refraction, and DiffractionDocument19 paginiReflection, Refraction, and DiffractionSteven RollinsÎncă nu există evaluări
- Total Internal Re EctionDocument169 paginiTotal Internal Re EctionHarshÎncă nu există evaluări
- Radio Wave PropagationDocument63 paginiRadio Wave PropagationMike FinezaÎncă nu există evaluări
- AwpDocument15 paginiAwpVishal IyerÎncă nu există evaluări
- Divell - Physics of WavesDocument18 paginiDivell - Physics of WavesJúlio César BarbosaÎncă nu există evaluări
- 110 Basic RadiationDocument12 pagini110 Basic RadiationLTE002Încă nu există evaluări
- 7) Radio-PS2Document23 pagini7) Radio-PS2Vladimir S. NikolićÎncă nu există evaluări
- 5 Application of Complex Number in Marine Engineering FieldDocument19 pagini5 Application of Complex Number in Marine Engineering Fieldainul sufiahÎncă nu există evaluări
- Seismic ReflectionDocument21 paginiSeismic Reflectionvelkus2013Încă nu există evaluări
- Geometrical Seismics: (Seismic Phenomenology)Document20 paginiGeometrical Seismics: (Seismic Phenomenology)forscribd1981Încă nu există evaluări
- Mechanical Waves2Document29 paginiMechanical Waves2Dennis AÎncă nu există evaluări
- C WavesDocument18 paginiC WavesTravis TeohÎncă nu există evaluări
- Laser Age in Optics (L.V. Tarasov)Document109 paginiLaser Age in Optics (L.V. Tarasov)alexramquiÎncă nu există evaluări
- As 23a WavesDocument42 paginiAs 23a WavesHany ElGezawyÎncă nu există evaluări
- L 5Document11 paginiL 5Jaybee YumangÎncă nu există evaluări
- Spectra Waves Statistics 2021Document53 paginiSpectra Waves Statistics 2021lucas GUILLAUMEÎncă nu există evaluări
- 02Document79 pagini02Dan FarrisÎncă nu există evaluări
- Unit 2 As EdexcelDocument91 paginiUnit 2 As Edexcelsadika sabaÎncă nu există evaluări
- EHT Unit IV Radiatio HT BasicsDocument21 paginiEHT Unit IV Radiatio HT BasicsLakshmiprasad KadariÎncă nu există evaluări
- Module 1 - Introduction To WavesDocument20 paginiModule 1 - Introduction To WavesMahek KhushalaniÎncă nu există evaluări
- Module 11 - Mechanical WavesDocument32 paginiModule 11 - Mechanical WavesJorge Jr DelgadoÎncă nu există evaluări
- Properties of WavesDocument34 paginiProperties of WavesNuraini SeptyaningrumÎncă nu există evaluări
- Seismic 101 LectureDocument67 paginiSeismic 101 Lecturerobin2806100% (2)
- Idebe Physics 4 1Document147 paginiIdebe Physics 4 1May Nang'onde71% (7)
- Introduction To AcousticsDocument7 paginiIntroduction To AcousticsMuhammad ZubairÎncă nu există evaluări
- Presentation 1.1Document57 paginiPresentation 1.1Rahimah Nnd ZaiÎncă nu există evaluări
- PHYS 2214 Assignment 4 Fall 2010Document4 paginiPHYS 2214 Assignment 4 Fall 2010Kira GidronÎncă nu există evaluări
- Unit2topic3 Examzone Ms PDFDocument3 paginiUnit2topic3 Examzone Ms PDFNusaiba AminÎncă nu există evaluări
- Physics Topic 4 Study GuideDocument8 paginiPhysics Topic 4 Study GuideSai 0235Încă nu există evaluări
- Seismic ReflectionDocument8 paginiSeismic ReflectionElbuneÎncă nu există evaluări
- Optical Transmission Coax Cable Twisted PairDocument11 paginiOptical Transmission Coax Cable Twisted PairAkash SharmaÎncă nu există evaluări
- Ultrasonic Testing Guide BookDocument81 paginiUltrasonic Testing Guide BookManoj Kumar100% (1)
- sg24 Waves 1Document2 paginisg24 Waves 1api-317469538Încă nu există evaluări
- The Physics of RadiationDocument10 paginiThe Physics of RadiationClaudio TesserÎncă nu există evaluări
- Detailed Notes - Section 03 Waves - AQA Physics A-Level PDFDocument12 paginiDetailed Notes - Section 03 Waves - AQA Physics A-Level PDFAdamu BukariÎncă nu există evaluări
- Interference (Wave Propagation)Document9 paginiInterference (Wave Propagation)Марко БерићÎncă nu există evaluări
- IGCSE Waves Definitions and ConceptsDocument2 paginiIGCSE Waves Definitions and ConceptsMohamad Rizal MukhtarÎncă nu există evaluări
- Seismic Propagation TheoryDocument33 paginiSeismic Propagation TheoryPaul's LeoÎncă nu există evaluări
- Radio Wave PropagationDocument92 paginiRadio Wave PropagationFufa OdaÎncă nu există evaluări
- Diffraction and InterferenceDocument40 paginiDiffraction and InterferenceUnexpected TheoryÎncă nu există evaluări
- P d) p P dB) =10 log P P: r t.G .G - λ L t rDocument10 paginiP d) p P dB) =10 log P P: r t.G .G - λ L t rTrifa QadirÎncă nu există evaluări
- Lecture - 4 - Wave MotionDocument46 paginiLecture - 4 - Wave MotionAlkgema Stores100% (1)
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsDe la EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsÎncă nu există evaluări
- JBL Audio Engineering for Sound ReinforcementDe la EverandJBL Audio Engineering for Sound ReinforcementEvaluare: 5 din 5 stele5/5 (2)
- Overcoming Infrastructure ChallengeDocument20 paginiOvercoming Infrastructure ChallengeRizkaÎncă nu există evaluări
- Mahakam Bright FutureDocument12 paginiMahakam Bright FutureRizkaÎncă nu există evaluări
- APC000230AIPleocs 1Document6 paginiAPC000230AIPleocs 1RizkaÎncă nu există evaluări
- Unconventional Oil and Gas Potential PDFDocument85 paginiUnconventional Oil and Gas Potential PDFRizka100% (1)
- Indonesian Current Policy & RegulationDocument23 paginiIndonesian Current Policy & RegulationRizkaÎncă nu există evaluări
- Goldenrulesreport PDFDocument150 paginiGoldenrulesreport PDFRizkaÎncă nu există evaluări
- Indonesia Oil and Gas Guide 2012Document361 paginiIndonesia Oil and Gas Guide 2012krakrikruÎncă nu există evaluări
- Vee Ken and Desilva 04Document24 paginiVee Ken and Desilva 04RizkaÎncă nu există evaluări
- Geo TourismDocument61 paginiGeo TourismRizkaÎncă nu există evaluări
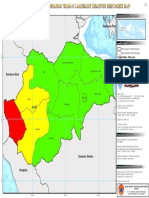
- Risk Landslide JambiDocument1 paginăRisk Landslide JambiRizkaÎncă nu există evaluări
- Session 11 - Seismic Inversion (II)Document78 paginiSession 11 - Seismic Inversion (II)RizkaÎncă nu există evaluări
- 1918 LithosiDocument62 pagini1918 LithosiRizkaÎncă nu există evaluări
- Biodiversity and GeodiversityDocument23 paginiBiodiversity and GeodiversityRizkaÎncă nu există evaluări
- CGGV 0000012643Document22 paginiCGGV 0000012643RizkaÎncă nu există evaluări
- AVO & InversionDocument44 paginiAVO & InversionRizkaÎncă nu există evaluări
- Potensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratDocument13 paginiPotensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratRizkaÎncă nu există evaluări
- Stochastic InversionDocument16 paginiStochastic InversionLeone DoisneauÎncă nu există evaluări
- Potensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratDocument13 paginiPotensi Geowisata Bukit Karst Malakutan Desa Kolok Nantuo, Kota Sawahlunto Sumatra BaratRizkaÎncă nu există evaluări
- Caves and KarstDocument57 paginiCaves and KarstAlexandru StefanÎncă nu există evaluări
- Schutte IC Chapter4 Visitor ManagementDocument60 paginiSchutte IC Chapter4 Visitor ManagementRizkaÎncă nu există evaluări
- Geotourism PDFDocument61 paginiGeotourism PDFRizkaÎncă nu există evaluări
- Alan Briggs Spot6 PDFDocument24 paginiAlan Briggs Spot6 PDFRizkaÎncă nu există evaluări
- Geo TourismDocument61 paginiGeo TourismRizkaÎncă nu există evaluări
- Resistivity LogDocument44 paginiResistivity Logmadabhay5172100% (13)
- Spectral Analysis For GeophysicsDocument27 paginiSpectral Analysis For GeophysicsRizkaÎncă nu există evaluări
- Formation Evaluations: Well LogsDocument11 paginiFormation Evaluations: Well LogsRMolina65Încă nu există evaluări
- Biogenic Abiogenic HC PDFDocument9 paginiBiogenic Abiogenic HC PDFRizkaÎncă nu există evaluări
- SLB Log Interpretation ChartsDocument310 paginiSLB Log Interpretation ChartsChilledambienceÎncă nu există evaluări
- Registros Electricos PDFDocument36 paginiRegistros Electricos PDFSaid Nahum Montes CarballoÎncă nu există evaluări
- Power Spectral DensityDocument18 paginiPower Spectral DensityNoir HamannÎncă nu există evaluări
- Oil and Gas Policy 2008Document55 paginiOil and Gas Policy 2008Magelah Peter GwayakaÎncă nu există evaluări
- Seismic Principles: - Chapter 1Document13 paginiSeismic Principles: - Chapter 1Mahardika Aji KurniawanÎncă nu există evaluări
- Wide-Azimuth Processing For Azimuthal Anisotropy Analysis: Cynthia Gomez, Erika Angerer, CGG Technology LondonDocument4 paginiWide-Azimuth Processing For Azimuthal Anisotropy Analysis: Cynthia Gomez, Erika Angerer, CGG Technology Londonhanane kedidaÎncă nu există evaluări
- 8 Geophysical Surveys: Volume 2 Part 15 Ground Investigation and Aspects of Geotechnical Design GuideDocument8 pagini8 Geophysical Surveys: Volume 2 Part 15 Ground Investigation and Aspects of Geotechnical Design GuideJihad HamdounÎncă nu există evaluări
- Geophysical Methods of Hydrocarbon ExplorationDocument30 paginiGeophysical Methods of Hydrocarbon ExplorationAshrafÎncă nu există evaluări
- Geo 2010 Tech Progr DetailsDocument20 paginiGeo 2010 Tech Progr DetailsMani BansalÎncă nu există evaluări
- TP 13 MarchDocument16 paginiTP 13 MarchDedy DayatÎncă nu există evaluări
- A New Algorithm For The Rotation of Horizontal Components of Shear-Wave Seismic DataDocument14 paginiA New Algorithm For The Rotation of Horizontal Components of Shear-Wave Seismic DataDante Leon CortesÎncă nu există evaluări
- Seismic ProcessingDocument415 paginiSeismic ProcessingMahmoud Said100% (1)
- Seismic Refraction Study Investigating The Subsurface Geology at Houghall Grange, Durham, Northern EnglandDocument7 paginiSeismic Refraction Study Investigating The Subsurface Geology at Houghall Grange, Durham, Northern EnglandCharlie Kenzie100% (1)
- Multi Azimuth and Wide Azimuth Lessons For Better Seismic Imaging in Complex SettingsDocument6 paginiMulti Azimuth and Wide Azimuth Lessons For Better Seismic Imaging in Complex SettingsmoodÎncă nu există evaluări
- Petroleum Geoscience and Geophysics Chapter 3Document76 paginiPetroleum Geoscience and Geophysics Chapter 3Shu En SeowÎncă nu există evaluări
- The Nimble Node - Million-Channel Land Recording Systems Have ArrivedDocument8 paginiThe Nimble Node - Million-Channel Land Recording Systems Have ArrivedМаксим Валерьевич ТарасовÎncă nu există evaluări
- EIA - OGDCL - 3D Seismic - Khewari & Bitrisim Report 2020Document308 paginiEIA - OGDCL - 3D Seismic - Khewari & Bitrisim Report 2020munaizzaÎncă nu există evaluări
- Instrument Parameters PDFDocument7 paginiInstrument Parameters PDFGeooscience WoorldÎncă nu există evaluări
- Sesi Pengenalan - GeophysicsDocument18 paginiSesi Pengenalan - GeophysicsTaufik MananÎncă nu există evaluări
- Analysis of Low-Frequency Passive Seismic Attributes in Maroun Oil Field, IranDocument16 paginiAnalysis of Low-Frequency Passive Seismic Attributes in Maroun Oil Field, IranFakhrur NoviantoÎncă nu există evaluări
- Jolley Brent FaultsDocument37 paginiJolley Brent FaultsRoland Rawlins IgaborÎncă nu există evaluări
- 7 - Engineering Geophysics PDFDocument10 pagini7 - Engineering Geophysics PDFTsegawbezto100% (1)
- Analysis and Processing of Reflection Seismic DataDocument67 paginiAnalysis and Processing of Reflection Seismic DataRonaldHatfieldÎncă nu există evaluări
- Reservoir Charac LookBack WayForward MADocument23 paginiReservoir Charac LookBack WayForward MAJuan Carlos OrdazÎncă nu există evaluări
- Improving Seismic To Well TiesDocument134 paginiImproving Seismic To Well TiesAlvaro PérezÎncă nu există evaluări
- D5777 1954294-1Document14 paginiD5777 1954294-1INDECAL SRLÎncă nu există evaluări
- Sesi - 07A - Seismic Processing - BasicDocument200 paginiSesi - 07A - Seismic Processing - BasicRidho IrsyadÎncă nu există evaluări
- 52 Things LeonardoDocument33 pagini52 Things LeonardoPâmellaFernandesÎncă nu există evaluări
- Introduction To Geophysical ProspectingDocument464 paginiIntroduction To Geophysical ProspectingCeciliaÎncă nu există evaluări
- Volve Seismic ST10010 Report - 1545785889Document108 paginiVolve Seismic ST10010 Report - 1545785889kamÎncă nu există evaluări
- EPWTDocument5 paginiEPWTyazeed7079875Încă nu există evaluări
- Maptek EurekaDocument4 paginiMaptek EurekaKenny CasillaÎncă nu există evaluări
- 3D Seismic Survey Design - KhalidDocument68 pagini3D Seismic Survey Design - KhalidUmairKhalidÎncă nu există evaluări