S-ar putea să vă placă și
- ColomboDocument10 paginiColomboසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- DC Power Flow EquationsDocument21 paginiDC Power Flow EquationsfpttmmÎncă nu există evaluări
- PIC16f877a Midrange InstructionDocument48 paginiPIC16f877a Midrange InstructionXaid HussainÎncă nu există evaluări
- Building Wires - Earth WireDocument1 paginăBuilding Wires - Earth WireMohamed KhanÎncă nu există evaluări
- IeslDocument1 paginăIeslසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Tutorial 8Document2 paginiTutorial 8සම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Ejemplo Flujos UwaterlooDocument6 paginiEjemplo Flujos Uwaterlooසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- EC 5001 - Memory 1Document56 paginiEC 5001 - Memory 1සම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Hydraulic SystemsDocument63 paginiHydraulic SystemsBhaskar ReddyÎncă nu există evaluări
- Unsymmetrical Fault AnalysisDocument106 paginiUnsymmetrical Fault Analysisසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- 6.0 High Voltage MeasurementDocument32 pagini6.0 High Voltage MeasurementGopala VetsaÎncă nu există evaluări
- Dynamic Programming: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarDocument42 paginiDynamic Programming: Ananth Grama, Anshul Gupta, George Karypis, and Vipin Kumarසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Gamesa G58 850kwDocument6 paginiGamesa G58 850kwසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- ECX4234 Lesson 2Document20 paginiECX4234 Lesson 2සම්පත් චන්ද්රරත්නÎncă nu există evaluări
- HV Chap1Document21 paginiHV Chap1sdsamarakkody0% (1)
- EE427 Answers Mar2008 PDFDocument13 paginiEE427 Answers Mar2008 PDFසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Gamesa G58 850kwDocument6 paginiGamesa G58 850kwසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Work ListDocument74 paginiWork Listසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- The Pareto Principle: Rosie Dunford, Quanrong Su, Ekraj Tamang and Abigail WintourDocument9 paginiThe Pareto Principle: Rosie Dunford, Quanrong Su, Ekraj Tamang and Abigail Wintourසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Attendance Report 2017 - GDL. CLII. Sem04. Sem06 PDFDocument12 paginiAttendance Report 2017 - GDL. CLII. Sem04. Sem06 PDFසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- cd6748 92Document24 paginicd6748 92සම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Embedded Systems Model Paper PDFDocument4 paginiEmbedded Systems Model Paper PDFසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Embedded Systems Model Paper PDFDocument4 paginiEmbedded Systems Model Paper PDFසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- EE427 Answers June2007 PDFDocument21 paginiEE427 Answers June2007 PDFසම්පත් චන්ද්රරත්නÎncă nu există evaluări
- High Voltage Engineering (Lucas)Document212 paginiHigh Voltage Engineering (Lucas)myerten100% (6)
- Thyristor Voltage Controller - 100494PDocument15 paginiThyristor Voltage Controller - 100494PNishanga SandamalÎncă nu există evaluări
- Bimba Ref HandbookDocument47 paginiBimba Ref HandbookRico AriezonaÎncă nu există evaluări
- UNIT 4 MechatronicsDocument21 paginiUNIT 4 MechatronicsMuthuvel M100% (1)
- EE402 Answers Feb2005Document8 paginiEE402 Answers Feb2005සම්පත් චන්ද්රරත්නÎncă nu există evaluări
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (121)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Philco H3410 Predicta Princess Sams 466 1Document21 paginiPhilco H3410 Predicta Princess Sams 466 1daviÎncă nu există evaluări
- Wcm2012f2s SeriesDocument4 paginiWcm2012f2s Seriesgoogi7Încă nu există evaluări
- Bist Tutorial 2 PDFDocument9 paginiBist Tutorial 2 PDFjcfermosellÎncă nu există evaluări
- Op Amp PresentationDocument23 paginiOp Amp Presentationboomadev6321Încă nu există evaluări
- R820 Technical DocumentationDocument5 paginiR820 Technical DocumentationZainul Abedin SayedÎncă nu există evaluări
- 3S0765R 3S0765RF PDFDocument14 pagini3S0765R 3S0765RF PDFhectorsevillaÎncă nu există evaluări
- Flux WeakningDocument4 paginiFlux WeakningShivendraSaurabhÎncă nu există evaluări
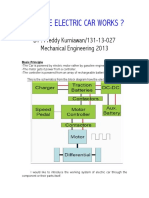
- How The Electric Car WorksDocument6 paginiHow The Electric Car WorksFreddy KurniawanÎncă nu există evaluări
- 7UT612 ProcedureDocument11 pagini7UT612 ProcedureArul Kumar100% (2)
- Data Sheet 6320 AisDocument139 paginiData Sheet 6320 Aisshahramkh59Încă nu există evaluări
- AC Ripple VoltageDocument5 paginiAC Ripple VoltageAgung Sugeng RiyadiÎncă nu există evaluări
- Ultra-Sensitive Dual-Channel Quadrature Hall-Effect Bipolar SwitchDocument17 paginiUltra-Sensitive Dual-Channel Quadrature Hall-Effect Bipolar SwitchMuhammad Jalal AldeenÎncă nu există evaluări
- RFSAS20EDRMDocument76 paginiRFSAS20EDRMJuan BoggianoÎncă nu există evaluări
- Service Manual: Colour TelevisionDocument48 paginiService Manual: Colour TelevisionRoosevelt Vega SanchezÎncă nu există evaluări
- Hauptkatalog 12-42kv GBDocument64 paginiHauptkatalog 12-42kv GBrabchabÎncă nu există evaluări
- 8096 MicrocontrollerDocument51 pagini8096 MicrocontrollerNarasimha Murthy Yayavaram67% (3)
- Shigley S Mechanical Engineering Design 9th Edition Solutions ManualDocument29 paginiShigley S Mechanical Engineering Design 9th Edition Solutions ManualZaim AkmalÎncă nu există evaluări
- Empr DMPR CatalogueDocument44 paginiEmpr DMPR CatalogueECATOnlineÎncă nu există evaluări
- Aiwa Nsx-s505 A508Document22 paginiAiwa Nsx-s505 A508RicardoÎncă nu există evaluări
- Aes in Fpga PDFDocument169 paginiAes in Fpga PDFChandan ChoudhuryÎncă nu există evaluări
- Basic Radar System Block DiagramDocument9 paginiBasic Radar System Block Diagrambapiraju saripellaÎncă nu există evaluări
- Cpu's PackageDocument1 paginăCpu's PackagepangaeaÎncă nu există evaluări
- POWER ELECTRONICS Tutorial HHDocument6 paginiPOWER ELECTRONICS Tutorial HHStreet EngineersÎncă nu există evaluări
- CycloconvertersDocument17 paginiCycloconverterssintakyut abieeztÎncă nu există evaluări
- Automatic Solar Irrigation SystemDocument16 paginiAutomatic Solar Irrigation SystemDebashishParidaÎncă nu există evaluări
- Microelectronics PDFDocument15 paginiMicroelectronics PDFJeanin Marquez ÜÎncă nu există evaluări
- Product Specification: Preliminary Specification (V) Final SpecificationDocument20 paginiProduct Specification: Preliminary Specification (V) Final Specificationเกียรติศักดิ์ ภูมิลาÎncă nu există evaluări
- Ece R13 2-1 PDFDocument12 paginiEce R13 2-1 PDFHassanÎncă nu există evaluări
- SU99Document95 paginiSU99saopauloÎncă nu există evaluări