S-ar putea să vă placă și
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Business NetworkingDocument3 paginiBusiness Networkingferdinando16100% (1)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- AI Solutions Class 10 - Part BDocument33 paginiAI Solutions Class 10 - Part BAahana Singh0% (1)
- Deep Learning in Computer Vision - Principles and ApplicationsDocument339 paginiDeep Learning in Computer Vision - Principles and Applicationsnaveen441100% (1)
- CNN Basics and Techniques ExplainedDocument19 paginiCNN Basics and Techniques Explainedseul aloneÎncă nu există evaluări
- AWS FMOps LLMOps Operationalise GenAI Using MLOps PrinciplesDocument56 paginiAWS FMOps LLMOps Operationalise GenAI Using MLOps PrinciplesQ ChengÎncă nu există evaluări
- FB19Document6 paginiFB19Bassel AlmouieÎncă nu există evaluări
- Theories of 2 Language LearningDocument23 paginiTheories of 2 Language LearningJames Gildardo CuasmayànÎncă nu există evaluări
- MTCSC292-Regular-Batch 2021 lab exam titleDocument2 paginiMTCSC292-Regular-Batch 2021 lab exam titleEKÎncă nu există evaluări
- Krashen ArticleDocument2 paginiKrashen ArticleIliana GarciaÎncă nu există evaluări
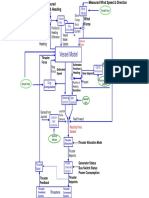
- 02 - K-Pos System Principles, BlockDiagramDocument1 pagină02 - K-Pos System Principles, BlockDiagramLeca GeorgeÎncă nu există evaluări
- AI Quiz - Key Concepts on Agents, Problem Solving TechniquesDocument10 paginiAI Quiz - Key Concepts on Agents, Problem Solving TechniquesPrerna SinghÎncă nu există evaluări
- Lab07 MysqlDocument12 paginiLab07 MysqlhuyÎncă nu există evaluări
- DLL Araling Panlipunan 2Document42 paginiDLL Araling Panlipunan 2MarxPascualBlanco100% (2)
- El 204 - Principles and Theories of Language Acquisition and Learning Lesson 9Document3 paginiEl 204 - Principles and Theories of Language Acquisition and Learning Lesson 9Chaé RiÎncă nu există evaluări
- Comparison of Malware Classification Methods Using Convolutional Neural Network Based On Api Call StreamDocument19 paginiComparison of Malware Classification Methods Using Convolutional Neural Network Based On Api Call StreamAIRCC - IJNSAÎncă nu există evaluări
- 5 2 Multilayer PerceptronDocument17 pagini5 2 Multilayer PerceptronDaystar YtÎncă nu există evaluări
- Time (Sec) Process Variable (%) OP (%)Document4 paginiTime (Sec) Process Variable (%) OP (%)niveathaÎncă nu există evaluări
- Online Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AliDocument14 paginiOnline Genetic-Fuzzy Forward Controller For A Robot Arm: Prof Dr. Abduladeem A. AlinguyendattdhÎncă nu există evaluări
- Role of NLP in ChatBotsDocument1 paginăRole of NLP in ChatBotsUjwalÎncă nu există evaluări
- Neural Turing MachineDocument2 paginiNeural Turing Machineava939Încă nu există evaluări
- Object Detectionwith Convolutional Neural NetworksDocument12 paginiObject Detectionwith Convolutional Neural NetworksSejal KaleÎncă nu există evaluări
- Excel Course OutlineDocument3 paginiExcel Course OutlineAh RashedÎncă nu există evaluări
- Practical AnswrsDocument22 paginiPractical Answrsbhuyanashutosh5Încă nu există evaluări
- Decision Tree Model: Bùi Tiến Lên 2021Document35 paginiDecision Tree Model: Bùi Tiến Lên 2021A Trần Phạm Minh NhựtÎncă nu există evaluări
- Unit 3 Basics of SQLDocument7 paginiUnit 3 Basics of SQLJagani ShrushtiÎncă nu există evaluări
- Analyzing Discourse and GenreDocument2 paginiAnalyzing Discourse and GenreMates Anamaria100% (1)
- CS LabReport 3Document10 paginiCS LabReport 3Muhammad AfzaalÎncă nu există evaluări
- Introduction To Pattern Recognition: Selim AksoyDocument40 paginiIntroduction To Pattern Recognition: Selim AksoyalcuperÎncă nu există evaluări
- Experiment List - DBMS - KCS551Document1 paginăExperiment List - DBMS - KCS551Navneesh kumarÎncă nu există evaluări
- Water Management Using PLCDocument7 paginiWater Management Using PLCdrbasit93Încă nu există evaluări