Documente Academic
Documente Profesional
Documente Cultură
2 - Morfología (Sistema Motor - Sensorial - Control)
Încărcat de
rubiohotDrepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
2 - Morfología (Sistema Motor - Sensorial - Control)
Încărcat de
rubiohotDrepturi de autor:
Formate disponibile
47
MORFOLOGA DEL ROBOT
5.1
A
INTRODUCCIN
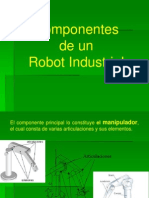
PRINCIPALES PARTES DE UN ROBOT INDUSTRIAL
Elementos de un robot como
brazo articulado ( Segn la
IFR ) :
Estructura mecnica
Transmisiones
reducciones
Elementos terminales
Sistema
motriz
:
( Elementos motores )(
Actuadores )
Sistema
sensorial
( Sensores )
Sistema de control
B
CARACTERSTIC
AS ESTTICAS
CARACTERSTICAS DEL SISTEMA ROBTICO
Grados de libertad ( GDL )
Accesibilidad
Capacidad de carga
Grados de maniobrabilidad ( GDM
)
Movilidad
Espacio de trabajo
Estabilidad ( oscilaciones )
48
CARACTERSTIC
AS DINMICAS
Precisin de los
movimientos,
que
depende de :
Resolucin
espacial
Precisin
( exactitud )
ESTRUCTURA GENERAL DE UN ROBOT
ESTRUCTURA
MECNICA
Repetibilidad
Sirve de soporte del rgano terminal.
Cambiadores de
herramientas
De montaje
De proteccin anticolisin
Pinzas
Pinzas
angulares
radiales
Pinzas
Ventosas de
especiales
vaco
Brazo
Elementos
terminales
Mueca
De operacin ( Herramientas )
De sujecin
SISTEMA
MOTRIZ
SISTEMA
LOCOMOTO
R
Pinzas
paralelas
Pinzas de 3
dedos
Acta sobre la estructura mecnica del robot modificando su
configuracin, y por tanto, la situacin del elemento terminal.
Formado por los elementos motores ( actuadores ) : Generan el
movimiento de la estructura mecnica del robot segn las rdenes
dadas por la UC, permitiendo modificar la posicin del elemento
terminal.
CLASIFICACIN SEGN LA NATURALEZA DE LA Eactivacin:
( Eneumtica, Ehidrulica, Eelctrica )
ACTUADORES
NEUMTICOS
ACTUADORES
HIDRULICOS
ACTUADORES
ELCTRICOS
Cilindros neumticos
Motores neumticos
Cilindros hidrulicos
De simple efecto
De doble efecto
Motores hidrulicos
Motores elctricos
Neumticos De paletas rotativas
De pistones
Hidrulicos De paletas deslizantes
De engranajes
De pistones ( axiales y radiales )
Motores
Elctricos
Motores de
corriente
continua ( DC )
Controlados por Inducido
Con escobillas
Controlados por excitacin
Sin escobillas
( Motores
brushless )
49
Motores de
corriente
alterna
( AC )
Motores
paso a paso
Sncronos
De imn permanente
Asncronos
De reluctancia variable
Hbridos
Mixtos ( sistemas electrohidrulicos )
CLASIFICACIN SEGN EL TIPO DE MOVIMIENTO GENERADO :
ACTUADORES LINEALES ( CILINDROS )
ACTUADORES ROTATIVOS ( MOTORES
)
En la actualidad, los robots usan mayoritariamente el accionamiento elctrico.
Adems es necesario incluir :
1) TRANSMISIONES : Mecanismos de conversin y transmisin del movimiento.
HDUC
2) REDUCTOR
CYCLO
EPICICLOIDAL
Alternativa a las reductoras :
AS :
IKONAGEAR
SYNKDRIVE
Accionamiento directo [ Direct
Drive ( DD ) ]
3) ACOPLADORES : Dispositivos mecnicos usados para conectar 2 ejes que no
sean exactamente | | , o estn ligeramente desalineados. Suelen hacerse con
materiales flexibles, pero resistentes ( trozo de espiral de nylon o muelle de acero ).
ACOPLAMIENT
OS
SISTEMA
SENSORIA
L
Para transmitir par y velocidad entre ejes casi alineados :
Desviacin angular
Desplazamiento axial
Separacin
Juntas cardam y juntas homocinticas
TIPOS
De una pieza
Acoplamientos elsticos
De varias piezas
Acoplamientos mviles y articulados
Necesario para conocer el estado interno del robot y de su entorno .
Sensores
:
Dispositivos elctrico/mecnicos que convierten
magnitudes fsicas a valores medibles de dicha magnitud ( tensin,
intensidad, pulsos,)
Sensores internos ( propioceptivos ) : Conocer el estado interno
del robot a travs de la posicin y v de cada articulacin : Posicin,
orientacin, v, a,
Sensores externos ( exteroceptivos ) :
Deteccin y
reconocimiento del entorno exterior del robot : Distancia, proximidad,
contacto. Se utilizan para :
Guiado del robot
Manipulacin
Identificacin de
50
objetos
Digitales
Encoders pticos
INTERNOS
De
posicin
Encoder ptico
incremental
Encoder ptico absoluto
Reglas pticas
Potencimetros
Analgicos
Resolvers
Sincroresolvers
Transformador diferencial de variacin lineal ( LVDT )
Transformador diferencial de variacin rotacional ( RVDT )
Regla magntica ( Inductosyn )
De velocidad
Tacmetros
De
inclinacin
De
aceleracin
Inclinmetros
Convertidores ( f V )
Acelermetros
EXTERN Permiten al robot interactuar de manera flexible con su entorno.
OS
Dan al robot mayor independencia del entorno en el que se mueven,
lo que se traduce en un mayor grado de inteligencia.
De contacto
Slo indican contacto o no con un objeto.
( Ejemplo : Para detectar una pieza en la pinza )
De
fuerza
Galgas extensomtricas :
De
presencia
Con contacto
Galgas de hilo
Galgas semiconductoras
Clulas de carga
( De proximidad ) Sin contacto
Mecnicos ( Fines de carrera mecnicos )
Magnticos
Inductivos
De distancia
( De alcance ) Ultrasonidos
Lser :
Reed switches ( contacto elctrico )
Efecto Hall
Magnetoresistivos
Capacitivos
pticos
Triangulacin
Medida del tiempo de
propagacin
51
De reconocimiento de formas
Otros :
Sistemas de V.A
Sistemas tctiles
De luminancia, sonido, presin,
Sistema de control del manipulador Funcin : Hacer que el brazo pueda
alcanzar cualquier punto de su espacio de trabajo, de acuerdo con unas
especificaciones previamente establecidas.
TIPOS DE CONTROL : CINEMTICO DINMICO
SISTEMA
DE
CONTROL
Sistema de control de bajo nivel : Gobierna los actuadores
del robot a partir de la definicin de movimientos a ejecutar, de
acuerdo con el sistema de decisin y la informacin proporcionada
por el sistema sensorial.
Sistema de decisin y planificacin de tareas : Elabora el
movimiento del robot a partir de la definicin de la tarea a
ejecutar transmitida por el operador con ayuda del sistema de
comunicacin.
Sistema de comunicacin e interfaz de E/S
SISTEMAS
DE TRANSPORTE
SISTEMAS
DE
MANUTENCI
N
5.2
SISTEMAS
DE ALIMENTACIN
DE PIEZAS
Partes encapsuladas en cinta continua.
Cinta trasportadora
continua
Rodillos
Elevadores
Vibradores
Dosificadores
Posicionadore
s
PRINCIPALES CARACTERSTICAS DE UN ROBOT
5.2.1
CARACTERSTICAS ESTTICAS
GRADOS DE LIBERTAD
GDL
DOF
N parmetros independientes que fijan la situacin del elemento terminal.
N movimientos elementales independientes que el manipulador puede
realizar.
Cada uno de los movimientos independientes que una articulacin permite
efectuar entre 2 eslabones consecutivos de la cadena, confiere 1 GDL a la
estructura robtica.
El n GDL de una estructura robtica , viene determinado por la suma de los GDL de cada
una de las articulaciones que lo componen :
GDL. Estructura ( GDL. Articulaci ones )
52
Es frecuente : N GDL del robot = N articulaciones Cada articulacin representa 1
GDL.
El n GDL del robot determina su accesibilidad y capacidad para orientar su herramienta
terminal.
El n total de GDL requerido puede completarse por medio de la mueca : Articulacin o
conjunto de articulaciones que enlazan el elemento terminal con el elemento
de trabajo.
ROBOT REDUNDANTE
Para posicionar y orientar un cuerpo de cualquier manera en el espacio son necesarios 6 parmetros
( 3 para definir la posicin respecto a un sistema de referencia fijo y 3 para la orientacin ).
Para que un robot posicione y oriente su extremo ( y con l la pieza o
herramienta manipulada ) de cualquier modo en el espacio, son necesarios al
menos 6 GDL ( 6 movimientos independientes entre s ) : 3 GDL en el brazo
que proporcionan la posicin en que se quiere ubicar la mueca y 3 GDL en la
mueca que proporcionan su orientacin.
Si hay simetra, no son necesarios 6 GDL. De todas formas, se necesita siempre de 3 ejes en la
estructura del brazo, responsable del posicionamiento del elemento terminal.
Mayor n GDL
Flexibilidad en el posicionamiento del
elemento terminal.
Complejidad mecnica y de control
Robot redundante : N GDL mayor que el necesario para realizar un
determinado movimiento.
Robots planares redundantes
Robot plano con 3 GDL
Robot plano con 3
para aumentar su
GDL
maniobrabilidad
para aumentar su
Vtrabajo
Al trabajar en un entorno con
obstculos, el dotar al robot de GDL
adicionales, su extremo podr acceder
a posiciones y orientaciones a las que,
como consecuencia de los obstculos,
no hubiera llegado con 6 GDL.
Otra situacin es la de dotar al robot
de 1 GDL adicional que le permita
desplazarse a lo largo de un carril,
aumentando as el volumen de
espacio al que puede acceder
Ambas figuras representan 2 Robots planares redundantes a los que les bastara con 2 GDL
para posicionar su extremo en cualquier punto del plan
Normalmente, en cadenas cinemticas abiertas, cada par ( enlacearticulacin ) slo tiene 1
GDL, rotacional o traslacional, pero no necesariamente. Puede haber enlaces de longitud 0
(inexistentes), cuando una articulacin tiene 2 o ms GDL que operan sobre ejes que se cortan.
A veces aparecen situaciones degeneradas. Ejemplo : Manipulador con 2 articulaciones
prismticas
53
Con ejes
El elemento terminal se
desplaza en un plano.
Con orientacin cte.
2 eslabones y 2 GDL
N GDL = N eslabones
Con ejes
El elemento terminal
se desplaza en una
recta.
Con orientacin cte.
2 eslabones y 1 GDL
N GDL < N
eslabones
RELACIN ( GDL / VARIABLES DE ESTADO DEL ELEMENTO TERMINAL )
Variables de estado del elemento terminal : Parmetros que definen la
configuracin ( posicin y orientacin ) del elemento terminal.
La mayora de los actuadores simples controlan nicamente 1 GDL ( izqder, arribaabajo, ngulo )
En general, un slido libre en el espacio se representa mediante 6 variables de estado :
- 3 de traslacin : ( x, y, z )
- 3 de orientacin : ( Ej : ngulos de Euler ).
No siempre N GDL = N Variables estado.
-
Para la representacin de la posicin de un automvil se usan 3 variables de estado : 2 de
traslacin ( x, y ) + 1 de orientacin.
Sin embargo, slo tiene 2 GDL : Acelerador ( adelante y atrs ) + Direccin ( volante ).
Hay movimientos imposibles ( movimiento lateral ).
Pero maniobrando puede adquirir cualquier configuracin.
HOLONOMA Y REDUNDANCIA
N GDL = N Variables de estado Robot holnomo
En algunas estructuras es posible adoptar configuraciones en las que 1 o ms articulaciones
no aportan GDL : Configuraciones singulares.
N GDL < N Variables de estado Robot noholnomo
N GDL > N Variables de estado Robot redundante
Ejemplos de redundancia : Robot serpiente para evitar obstculos Manipulador con carril para
aumentar volumen de trabajo Brazo humano :
- 7 GDL : [ 3 en el hombro + 1 en el codo + 3 en la mueca ( no contamos los dedos ) ]
- Un objeto en el espacio slo tiene 6 variables de estado.
- Eso hace que haya varias formas de colocar la mano de la misma forma.
Aunque la redundancia d ms riqueza al movimiento, complica la manipulacin.
Robot noholnomo : Tiene ligaduras, que tpicamente se deben a un contacto de un elemento con
el mundo.
Normalmente un robot mvil tiene ligaduras : La condicin de rodadura ideal de las ruedas en
contacto con el suelo ( no pueden patinar ).
B
GRADOS DE MANIOBRABILIDAD
GDM
Robot con 2 GDM
54
GDM ( GDL 6 ) = GDL que superan el n de 6
Facilitan la maniobra del manipulador para evitar obstculos.
Es ms ventajoso utilizar manipuladores con GDL extra ( GDM ),
que disear elementos de trabajo con caractersticas
especiales, o modificar el entorno de produccin.
Los posicionadores de piezas, considerados como ejes externos
del robot, le confieren GDL adicionales
C
ESPACIO DE TRABAJO ( REA DE TRABAJO ) ( CAMPO DE ACCIN )
Conjunto de puntos en los que puede situarse el elemento terminal del robot .
Conjunto de posiciones en el espacio potencialmente alcanzables por el
extremo del robot.
Corresponde al volumen espacial encerrado por las superficies que determinan
los puntos a los que accede el manipulador con su estructura totalmente
extendida y totalmente retrada.
Necesario para disear el entorno de trabajo del robot y suele ser suministrado por el
fabricante.
Normalmente viene representado por 2 secciones elegidas en funcin del tipo de robot.
Espacio de trabajo = f ( tamao, forma y tipo de los eslabones que integran el robot,
limitaciones de movimiento impuestas por el sistema de control )
Los movimientos de posicionado posibles ( movimientos 1os ) determinan el espacio bsico
de trabajo, y los de orientacin ( movimientos 2os ) definen el espacio suplementario
de trabajo.
En los catlogos suministrados por los fabricantes se suele indicar mediante un dibujo acotado. Si la
informacin es de tipo numrico Se indica mediante el rango de recorrido de cada
articulacin
Nunca deber utilizarse el elemento terminal ( efector ) colocado en la mueca para la
obtencin del espacio de trabajo. Razones :
Es un elemento aadido al robot, y si variase habra que calcular de nuevo el espacio de
trabajo.
Si es largo ( para aumentar el Vtrabajo ) puede impedir ciertos movimientos y se pierde precisin.
D
ACCESIBILIDAD
Representa la facilidad con la que el robot llega a los
distintos puntos de su espacio de trabajo.
Accesibilidad total de un
punto en el espacio de
trabajo
No todos los puntos del espacio de trabajo presentan la misma
accesibilidad ( a unos se llegar mejor y antes que a otros ).
Suponiendo la base fija, la superficie que delimita el Vtotal representa
la accesibilidad mnima
Puntos de accesibilidad mnima : Puntos de la superficie que delimita el
55
espacio de trabajo. A ellos slo puede llegarse con una nica orientacin.
Puntos de accesibilidad mxima : Puntos a los que el elemento terminal
puede acceder en cualquier direccin. Si existen, se encuentran en el interior
del volumen bsico.
MOVILIDAD
Puede aumentarse el espacio de trabajo de un robot
dotndolo de movilidad, ya sea mediante un carril y
ruedas, o por deslizamiento sobre una bancada.
El robot puede acceder a un entorno ms amplio, o incluso
sincronizar su desplazamiento al movimiento de una cadena de
montaje.
Robot dotado de movilidad traslacional
5.2.1
CARACTERSTICAS DINMICAS
CAPACIDAD DE CARGA
Es la masa ( en Kg ) que puede transportar la garra del manipulador.
A veces, este dato lo proporcionan los fabricantes, incluyendo la masa de la propia garra, caso de
ser comercializada en conjunto.
Es una de las caractersticas que ms se tienen en cuenta en la seleccin de un robot, segn la tarea
a la que se destine.
En modelos de robots industriales, la capacidad de carga puede oscilar entre ( 1 200 )Kg
En soldadura y mecanizado es comn precisar capacidades de carga > 50Kg
B
ESTABILIDAD
Hace referencia a la ausencia de oscilacin en el movimiento de la
herramienta.
Tipos de oscilaciones : Amortiguadas No amortiguadas
Las oscilaciones son perjudiciales porque pueden :
1) Producir deterioros en las partes mecnicas e hidrulicas del brazo.
2) Hacer que la herramienta, en repeticiones sucesivas del mismo movimiento, siga diferentes
caminos en el espacio, obligando a una mayor distancia entre la trayectoria deseada y los
objetos del entorno.
3) Incrementar el tiempo necesario para que la herramienta se posicione en un punto preciso.
4) Causar una colisin con algn elemento del entorno si se sobrepasa la posicin de parada.
C
RESOLUCIN ESPACIAL
Especifica el ms pequeo incremento de movimiento que puede ejecutar el
56
robot. Concepto descriptivo del movimiento del robot en el extremo del
rgano terminal.
Resolucin espacial = f ( Sistema de control, imprecisiones de los componentes mecnicos )
Resolucin : Mnima diferencia entre 2 puntos consecutivos en que el extremo del rgano
terminal puede situarse, siendo capaz de distinguir uno de otro.
D
PRECISIN ( EXACTITUD )
Capacidad del sistema para posicionar el extremo de la mueca ( la punta de
la herramienta ) en un punto predeterminado del espacio de trabajo.
Grado de precisin ( GDP ) = Diferencia entre la posicin realmente alcanzada
y la originalmente especificada. Distancia entre el punto programado y el valor
medio de los puntos realmente alcanzados al repetir el movimiento varias
veces con carga y T nominales.
Factores que influyen en la precisin :
Imprecisiones de los componentes mecnicos : Enlaces, engranajes, deflexiones,...
Errores en los sensores.
Resolucin espacial de los componentes del sistema de control de movimientos.
La posicin arbitraria fijada como objetivo.
E
REPETIBILIDAD
Capacidad del robot para posicionarse de nuevo sobre el mismo punto que
haba sido indicado previamente, en idnticas condiciones ( T, direccin y
vaproximacin ) y las veces que sean necesarias.
Establece el GDP en la repeticin de los movimientos de un manipulador al
realizar una tarea programada.
Viene representada por la superficie esfrica que encierra los puntos de varianza del extremo del
rgano terminal despus de mltiples rdenes de posicionamiento, desde el mismo punto inicial
al mismo punto final de un programa en idnticas condiciones de carga, T,...
REPRESENTACIN GRFICA DE PROPIEDADES DINMICAS
57
>
+
5.
3
Trained positions
Rango de error debido a imprecisiones
en componentes y sensores.
ESTRUCTURA MECNICA
5.3.1
Posicionamientos repetidos entre puntos
adyacentes :
CARACTERIZACIN DEL MANIPULADOR INDUSTRIAL CONVENCIONAL
MANIPULADOR : Estructura mecnica poliarticulada. Adopta una estructura de
cadena cinemtica abierta formada por eslabones [ ( enlaces )( links )
( elementos rgidos ) ] interrelacionados ( unidos entre s ) mediante
articulaciones ( joints ) que permiten el movimiento relativo entre cada 2
eslabones consecutivos.
Una cadena cinemtica es abierta, si numerando secuencialmente los eslabones desde el 1,
cada eslabn est conectado al anterior y al siguiente mediante una articulacin, excepto el 1 (
base )[ fijo al suelo ] y el ltimo [ libre y donde se sita el elemento terminal ( elemento
de trabajo ) ].
Cadena cinemtica cerrada : Cuando al
menos hay 2 caminos para llegar, a travs de la
misma, a cualquier eslabn desde cualquier otro.
Cadena cinemtica abierta : Slo 1 camino
posible.
CARACTERIZACIN DE LOS ESLABONES
Cualquier eslabn de la
cadena cinemtica queda
caracterizado por la especificacin
de 2 parmetros :
Longitud del eslabn :
ai
Torsin del eslabn :
Definida por el ngulo de
torsin
58
ai
i
Distancia ( medida sobre la normal comn ) entre los ejes de las articulaciones en las que
finaliza el eslabn.
ngulo que en un plano a a i , existe entre ambos ejes.
CARACTERIZACIN DE LAS ARTICULACIONES
La posicin relativa entre 2
eslabones consecutivos de la cadena
se referencia mediante 2 parmetros :
Distancia entre
eslabones : i
ngulo entre eslabones :
i
di
Distancia entre las normales ( definidas por a i -1 y a i ) al eje de la articulacin.
ngulo entre las normales medido en un plano al eje de la articulacin.
5.3.
2
TIPOS DE ARTICULACIONES
GDL de una articulacin : Cada uno de los movimientos independientes que
una articulacin puede realizar entre 2 eslabones de la cadena.
Las articulaciones se caracterizan por el movimiento que permiten entre los
elementos que enlazan.
El movimiento de cada articulacin puede ser :
De
desplazamiento
De giro
ARTICULACIN
GDL
ROTACIONAL
(R)
( ROTATIVA )
( DE
ROTACIN)
PRISMTICA
(P)
(TRASLACION
AL)
( DE
TRASLACIN )
Una combinacin de
ambas
DESCRIPCIN
El eslabn dado gira alrededor de un eje fijo al enlace
anterior.
i es el parmetro variable que describe el movimiento
de rotacin respecto al eje.
Junto con la prismtica son las ms utilizadas en los
actuales robots industriales.
El eslabn dado se desliza en lnea recta sobre un eje
fijo al enlace anterior.
d i es el parmetro variable que describe el movimiento
de traslacin en la direccin del eje.
59
ESFRICA
Desventaja: Por sus 3 GDL, permite rotaciones respecto
a ejes cuyas direcciones varan con relacin a las
direcciones de los pares que actan sobre la
articulacin.
Cuando se desea obtener el efecto de una articulacin
esfrica, es aconsejable emplear su equivalente
cinemtico : 3 articulaciones de rotacin cuyos
ejes se intersecan.
( RTULA )
DE TORNILLO
GDL = 1
CILNDRICA
PLANAR
GDL = 2
= ( Prismtica +
Rotacional )
GDL = 2
CONVENCIN PARA LA REPRESENTACIN DE LAS ARTICULACIONES
La prismtica se representa mediante paraleleppedos y la rotacional mediante cilindros.
ROTACIONAL ( R )
PRISMTICA ( P )
La posicin y orientacin del cuerpo Ci referido al cuerpo Ci 1 vendr definida por los parmetros
de los eslabones ( a i , i ) y de las articulaciones ( i , d i ) Parmetros de
DENAVITHARTENBERG
5.3.3
ESTRUCTURAS
La eleccin de los tipos de articulaciones que se elijan para la unin de los distintos eslabones,
configura una estructura con unas caractersticas determinadas, que influirn en el diseo del
sistema de control y la distribucin de los elementos motores.
Por comodidad se suele separar el problema de posicionar el elemento terminal del de su
orientacin. Se suele hablar por separado de : BRAZO ( Estructura base ) y MUECA
1
Posicionamiento del extremo del brazo : Por medio de las 3 primeras
articulaciones.
Orientacin del elemento terminal ( de la mueca ) : Por medio de las 3
ltimas articulaciones de tipo rotacional.
5.3.3.1
ESTRUCTURA BASE ( BRAZO )
Las configuraciones de la base hacen referencia a las 3 primeras articulaciones del manipulador.
60
CONFIGURACIONES
CLSICAS
CONFIGURACIONES
NO CLSICAS
Las coordenadas que definen su movimiento (que son las clsicas ) les dan
nombre e indican los desplazamientos y giros bsicos que les permiten :
CARTESIANA ( PRTICO, GANTRY
)
ESFRICA ( POLAR )
CILNDRICA
SCARA
PARALELA
ANGULAR ( ARTICULAR )
Nomenclatura : ( D Desplazami ento G Giro )
Para la obtencin del volumen de trabajo terico de las diferentes configuraciones
consideraremos las siguientes hiptesis :
Dimensin principal = L
Radio de giro = 360
Rango de desplazamiento = L
( Segmentos de longitud L )
CONFIGURACIONES CLSICAS MS FRECUENTES
PARA ROBOTS MANIPULADORES INDUSTRIALES
Robot
Robot
Robot esfrico
cartesiano
cilndrico
Robot SCARA
La mayor parte de los robots instalados son de
configuracin articular.
Las configuraciones cilndrica y esfrica estn en
desuso.
CONFIGURACIN CARTESIANA
Traverse Robot
Rectilinear Geometry Robot or
Gantry Robot
Robot angular
61
Estructura PPP( 3D ) : 3 articulaciones
prismticas de ejes )
Los 3 desplazamientos bsicos del brazo son de
tipo prismtico, con movimientos de traslacin.
La posicin de un punto P del espacio se especifica
mediante coordenadas cartesianas : ( x,
y, z )
3
VOLUMEN DE TRABAJO TERICO : V L
Apta para seguir
especificada.
Espacio de trabajo amplio.
Precisin elevada y uniforme en todo el espacio de
trabajo.
Velocidad baja.
Accesibilidad : No adecuada para acceder a puntos
situados en espacios cerrados ( salvo pequeos y cbicos ).
El rectilneo ( prtico o gantry ) no puede acceder a puntos
situados en la base.
Construccin rgida : La distribucin de cargas no
presenta ningn problema. Capacidad de carga
independiente de la configuracin.
CONFIGURACIN CILNDRICA
una
trayectoria
previamente
62
VOLUMEN DE TRABAJO TERICO :
[ V L [ (2 L) 2 ( L2 ) ] ( 3 L3 ) ] V ( 9 L3 )
El volumen de trabajo es el de un toroide de seccin cuadrada
de radio interior L y radio exterior 2L
Estructura RPP o PRP( 2D 1G ) : 1 articulacin de
rotacin en el eje vertical + 2 prismticas ( una en z y otra en
el radio ) de ejes
La posicin de un punto P en el espacio se especifica mediante
coordenadas cilndricas : ( , r , z )
Aplicacin : Cuando la tarea a desarrollar o las
mquinas servidas se sitan radialmente al robot.
Ejemplo : En una clula flexible, con el robot situado en el
centro de la clula sirviendo a diversas mquinas dispuestas
radialmente a su alrededor
Capacidad de carga : Independiente de la configuracin.
Accesibilidad : Permite alcanzar zonas a la espalda. Difcil trabajar con objetos sobre la base.
Resolucin y precisin : Variable con la distancia al eje.
La precisin en la posicin de la mueca disminuye al acercarse a los lmites de trabajo.
Sistema de control : Complejo. Transformacin ( , r , z ) ( x, y, z ) compleja.
C CONFIGURACIN PARALELA
El elemento terminal se encuentra conectado a la base por al
menos 2 cadenas cinemticas independientes.
Espacio de trabajo reducido : De tipo casquete esfrico.
Inicialmente utilizada en simuladores de
vuelo.
La carga se reparte por igual entre todos los
actuadores.
Capacidad de carga : Independiente de la
configuracin.
Compensa los errores en transmisiones y
actuadores.
La rigidez de los eslabones asegura mayor
precisin de posicionamiento.
63
Bajo coste y montaje preciso
CONFIGURACIN ESFRICA ( POLAR )
Estructura RRP( 1D 2G ) : 2 articulaciones rotativas de
ejes + 1 prismtica
La posicin de un punto P en el espacio se fija mediante
coordenadas esfricas : ( , , r )
Buena adaptacin a espacios de trabajo centrados
en el robot.
Configuracin utilizada por los primeros robots.
VOLUMEN DE TRABAJO TERICO :
[ V (4 / 3) [ (2 L) 3 L3 ] ( 28 / 3 ) L3 ] V ( 29 L3 )
En un manipulador con 3 enlaces de longitud L, el volumen de
trabajo es el que existe entre una esfera de radio 2L y otra
concntrica de radio L.
Capacidad de carga : Dependiente de la configuracin :
al r
Accesibilidad : Mayor que la cilndrica. Permite trabajar
sobre la base del robot.
Resolucin y precisin : Variable con la distancia al eje.
Sistema de control : Complejo. Transformacin ( , , r )
( x, y, z ) compleja
CONFIGURACIN ANGULAR ( ARTICULAR )( ANTROPOMRFICA )( DE REVOLUCIN )
64
Trabaja bien en reas de trabajo
esfricas, pero en general se adapta a
cualquier rea.
Configuracin ms verstil y fcil de
construir.
Soluciona el problema de acceso a
espacios cerrados, pero necesita un
esfuerzo suplementario en el sistema
de control para el seguimiento de
trayectorias rectilneas
Todas las articulaciones del brazo son de
rotacin.
Estructura RRR( 3G )( 3 articulaciones
rotacionales ) : El 1er eje ( vertical ) a los ejes
siguientes ( horizontales y | | ).
La posicin de un punto P en el espacio se especifica
mediante coordenadas angulares : ( , , )
3
3
VOLUMEN DE TRABAJO TERICO : [ V (4 / 3) (2 L) (32 / 3) L ] V ( 34 L )
Si la longitud de los 3 enlaces es L, el volumen de trabajo es el de una esfera de radio 2L
Capacidad de carga : Dependiente de la configuracin : al distancia al 1er eje.
Accesibilidad : Buena, permite acceder a puntos prximos a la base y salvar obstculos.
Precisin : Variable con la configuracin. Depende de la distancia a la base.
Los errores de posicionamiento tienden a aumentar a medida que se extiende el brazo Mayor
precisin en el entorno de la base.
Sistema de control : Complejo. Transformacin ( , , ) ( x, y, z ) compleja. Como las
trayectorias se especifican en coordenadas cartesianas, hay que hacer transformaciones.
CONFIGURACIN SCARA
VOLUMEN DE TRABAJO TERICO :
V L (2 L) 2 ( 4 L3 )
Desarrollado por la industria japonesa
Estructura RRP o PRR ( ejes | |
para realizar tareas de montaje
electrnico, y en general, de
verticales ) : 2 articulaciones
manipulacin vertical.
rotativas en el mismo plano + 1
Para realizar tareas de montaje en un plano.
prismtica en el eje vertical
Casi todos los fabricantes de robots
incluyen algn SCARA en su oferta
Capacidad de carga : Independiente de la configuracin.
Accesibilidad : Buena, permite salvar obstculos.
Precisin : Variable con la configuracin, pero mayor que la angular.
V ( 13 L3 )
65
5.3.3.
2
ESTRUCTURA DE LA MUECA
Completa el n GDL requerido para orientar el elemento terminal . Suele constar
de 1 a 3 rotaciones.
El movimiento de un brazo robtico provisto de una
mueca con un efector final, es frecuente tratarlo en 2
pasos :
1) Se mueve el brazo para posicionar el extremo del ltimo
enlace.
2) Se orienta la mueca para que el efector final tenga la
orientacin adecuada.
Hay tareas que pueden requerir el movimiento simultneo de
brazo y mueca.
3DOF ( Position )
3DOF ( Orientation )
NGULOS USADOS PARA DESCRIBIR LA ORIENTACIN DE LA MUECA
NGUL
OS
DE
EULER
Cualquier orientacin se
describe mediante :
Rotacin 1 sobre eje Z +
Rotacin 2 sobre el
nuevo eje Y + Rotacin
3 sobre el nuevo eje Z
66
NGUL
OS RPY
Roll ( balanceo )(
Elevacin )
Pitch ( cabeceo )(
Desviacin )
Yaw ( guio )( Giro )
Roll y Pitch son iguales a los
2 primeros ngulos de Euler.
Yaw es diferente y consiste en
una rotacin 3 sobre el eje X
5.3.
4
ELEMENTOS TERMINALES ( EFECTORES FINALES )
Encargados de interaccionar directamente con el entorno del robot.
Se colocan en el extremo del ltimo enlace del manipulador y suministran la capacidad de
agarre del objeto que se pretende manipular, o la colocacin de una herramienta apropiada para
la tarea.
CARACTERSTICAS :
Proporcionan mayor versatilidad al robot.
Independientes del robot.
Especficamente diseados para cada tipo de trabajo ( pueden llegar a
alcanzar el 30% del coste total del robot ).
Los fabricantes pueden ser diferentes a los de construccin del robot.
CLASIFICACIN SEGN EL TIPO DE TRABAJO : Pueden ser tanto elementos de
aprehensin como herramientas de operacin. En muchas aplicaciones el robot ha de
realizar operaciones que no consisten en manipular objetos, sino que implican el uso de una
herramienta.
Elementos terminales de sujecin : Pinzas, ventosas, electroimanes,
Elementos terminales de operacin Herramientas : Soldadura, corte,
montaje, pintura,
A
ELEMENTOS TERMINALES DE SUJECIN
FUNCIN : Agarrar y sostener los objetos para su transporte. Se suelen denominar
pinzas
DISPOSITIVO DE AGARRE : Mecnico Ventosas Adhesivo Ganchos
67
Factores a tener en cuenta en su eleccin o diseo :
( Peso Forma Tamao ) del objeto a manipular y fuerza de agarre ( fuerza que es
necesario ejercer y mantener para sujetar el objeto ).
Parmetros del elemento terminal : Masa ( afecta a las inercias del robot ) Equipo de
accionamiento ( neumtico o elctrico ) ( El neumtico es el ms utilizado por ofrecer
mayores ventajas en simplicidad, precio y fiabilidad, aunque tiene dificultades de control de
posiciones intermedias. ) Capacidad de control ( para diversas posiciones del
elemento terminal ).
En la pinza se suelen situar : Sensores para detectar su estado ( abierta / cerrada ), o para
controlar el ( estado / situacin ) del objeto; sistemas de visin que proporcionen datos geomtricos
del objeto, detectores de proximidad, sensores de fuerzapar
SISTEMAS DE SUJECIN PARA ROBOTS
TIPO DE SUJECCIN
ACCIONAMIEN
TO
Pinza de presin :
Desplazamiento angular
Desplazamiento lineal
Neumtico
Elctrico
Pinza de enganche
Neumtico
Elctrico
Ventosas de vaco
Neumtico
Electroimn
Elctrico
USO
Transporte y manipulacin de piezas sobre las que
no importe presionar.
Piezas de grandes dimensiones o sobre las que no se
puede ejercer p.
Cuerpos con superficie lisa poco porosa ( cristal,
plstico, chapa metlica ).
Piezas ferromagnticas.
B ELEMENTOS TERMINALES DE OPERACIN
FUNCIN : Realizar modificaciones sobre objetos.
APLICACIONES : Pintura ( pistola ), soldadura ( al arco, por puntos, por plasma ), corte
( lser, agua a presin, sierra ), mecanizado ( perfilar, pulir, eliminar rebabas, atornillar ).
CARACTERSTICAS :
Herramienta fija : Diseo especfico para la aplicacin.
Herramienta mvil : Normalmente la herramienta est fijada rgidamente al extremo
del robot, pero en ocasiones se dota a ste de un cambiador de herramientas :
Dispositivo de cambio automtico que permite al robot usar diferentes herramientas durante
su tarea.
Suelen estar dotados de sensores integrados ( de posicin, de fuerza ).
HERRAMIENTAS DE OPERACIN
Pinza de
Soplete para
soldadura
soldadura al
por puntos
arco
Fresalija
( Para perfilar,
Cuchara para
colada
( Para trabajos de
fundicin )
Can lser
( Para corte de
Atornillador
Pistola de
Can de agua a p
pintura
( Para cortar diversos
eliminar rebabas,
materiales, soldadura o
materiales por chorro de
( Por pulverizacin
pulir,)
inspeccin
)
agua )
de la pintura )
Permite cambiar rpidamente la herramienta terminal del
robot.
68
CAMBIADOR
DE
HERRAMIENTAS
Consta de un plato principal conectado rgidamente a la mueca del robot, y
de varios platos secundarios que portan distintas herramientas.
diversos sistemas de acoplamiento entre los platos : Generalmente son
neumticos con autoretencin mecnica.
Es necesario transportar diversas seales ( elctricas, neumticas, hidrulicas )
entre los platos.
Sensor de proximidad para supervisin de la posicin de enclavamiento y
desenclavamiento del cabezal.
Dimensionado de los platos en funcin de las fuerzas y momentos ejercidos
sobre ellos y de la carga til del robot.
ELEMENTOS TERMINALES DE MONTAJE
FUNCIN :
Insercin de piezas
APLICACIONES
Ensamblado, medicin,
verificacin
CARACTERSTICAS :
Elevada precisin de posicionamiento.
Acomodacin de la pieza :
Pasiv
a
Activa
Mediante elemento elstico entre mueca y elemento terminal del
robot.
Mediante sensores de fuerza/par la UC corrige la posicin del robot
para acomodar el movimiento.
Necesidad de preparacin de las piezas a insertar.
Necesidad de ayudas sensoriales y mayor inteligencia.
D ELEMENTOS TERMINALES DE PROTECCIN ANTICOLISIN
FUNCIN : Permite desplazar la pinza en los 3 ejes de movimiento en caso de
golpe.
CARACTERSTICA : Sensores integrados detectan las mnimas desviaciones.
5.4
SISTEMA MOTRIZ
5.4.1
ELEMENTOS MOTORES ( ACTUADORES )
Propiedades a considerar :
Potencia
Precisin
Velocidad
Mantenimiento
Coste
Controlabilidad y buena respuesta
Peso y volumen ( baja relacin peso
dinmica
potencia )
ACTUADORES
NEUMTICOS
La fuente de E es aire a p : ( 5 10 )( kg / cm2 )( bares )
Filtrado, lubrificado y sin humedad.
La compresibilidad del aire hace difcil el control del posicionamiento.
El caudal de aire es controlado por vlvulas neumticas de mando elctrico.
Su sencillez, seguridad y robustez los hacen adecuados para aquellos casos en los que sea suficiente
un posicionamiento en 2 situaciones diferentes ( todo o nada ).
69
Emplear un robot con algn accionamiento neumtico requiere una instalacin de aire comprimido.
CILINDROS
NEUMTICOS
Movimiento lineal de un mbolo encerrado en un cilindro,
debido a una diferencia de p ( p ) a ambos lados de
aquel.
Buen posicionamiento en los extremos y dificultad de posicionamiento
continuo.
Funcionamiento simple y mantenimiento econmico.
Repetitividad inferior a otros tipos de actuadores.
Adecuados para manipulacin de piezas pequeas.
De simple efecto : El mbolo se desplaza en un sentido debido al empuje ejercido por el aire
a p, mientras que en el otro sentido se desplaza debido al efecto de un muelle recuperador
( recupera al mbolo a su posicin de reposo ).
De doble efecto : El aire a p empuja al mbolo en 2 direcciones, al poder ser introducido de
forma arbitraria en cualquiera de las 2 cmaras.
MOTORES
NEUMTICOS
Transforman la E del aire comprimido en movimiento
rotatorio.
Rotativos.
Simples.
De paletas
Ligeros y compactos.
Pueden tener dispositivos
rotativas
reductores para aumentar el par.
Arranque y parada muy
Menor velocidad que los de
rpidas.
De
aletas.
Velocidad y par variables.
pistones
Bajo nivel de vibracin.
Control simple.
Par elevado a bajas velocidades.
Difcil el control de posicin
De paletas rotativas : Sobre el rotor excntrico estn dispuestas unas aletas de longitud
variable. Al entrar aire a p en uno de los compartimentos formados por 2 aletas y carcasa, stas
tienden a girar hacia una situacin en la que el compartimento tenga mayor volumen.
De pistones axiales : Tiene un eje de giro solidario a un tambor que se ve obligado a girar
por las fuerzas que ejercen varios cilindros, que se apoyan sobre un plano inclinado.
ACTUADO
RES
HIDRULI
COS
La fuente de E es aceite mineral a p :
50 100 )( kg / cm2 )( bares ) [ a veces hasta 300( kg / cm2 ) ]
Requiere filtrado y deshumidificado ( autolubricante )
Es incompresible Estable frente a cargas estticas.
(
Funcionalmente similares a los neumticos.
VENTAJAS :
Grado de compresibilidad del aceite superior al del aire Mayor
precisin.
70
Las elevadas p de trabajo permiten desarrollar elevadas fuerzas y pares.
Elevada capacidad de carga y relacin potenciapeso : Puede soportar cargas
elevadas y gran potencia en poco volumen.
Repetitividad = ( 0.2 2.3 ) mm
Mantenimiento no muy complejo.
No presentan problemas de refrigeracin.
INCONVENIENTES :
Las elevadas ptrabajo propician la existencia de fugas de aceite a lo largo de
la instalacin.
Instalacin ms complicada que la de los neumticos y mucho ms que la
de los elctricos.
CILINDROS
HIDRULICOS
MOTORES
HIDRULICOS
ROTATIVOS
De paletas
deslizantes
Similares a los neumticos.
Tecnolgicamente similares a los
neumticos.
Elevado par de arranque y ( 90% )
Relativamente econmicos.
De engranajes
De pistones ( axiales y
radiales )
Los ms utilizados en los robots industriales actuales :
Facilidad de control.
ACTUADO
RES
ELCTRIC
OS
Alta repetitividad y gran precisin.
Sencillos, pero de construccin delicada.
Ms pesados que los neumticos e hidrulicos a igualdad de P.
Amplia variedad de cargas y velocidades, con variada precisin.
MOTOR DE CORRIENTE CONTINUA ( DC )
A.1
CON ESCOBILLAS
Los motores DC tienen 2 devanados internos que se alimentan con CC :
Inductor ( devanado de excitacin ) : Situado en el estator, crea un campo
magntico de direccin fija, llamado campo magntico de excitacin.
71
Inducido : Situado en el rotor, hace girar al mismo debido a la fuerza de Lorentz que
aparece como combinacin de la I circulante por l y el campo magntico de
excitacin. Recibe la I del exterior a travs del colector de delgas, en el que se apoyan
unas escobillas de grafito.
Para que se pueda realizar la conversin ( Eelctrica Emecnica ) de forma continua es necesario que
los campos magnticos de estator y rotor permanezcan estticos entre s. Esta transformacin es
mxima cuando ambos campos se encuentran en cuadratura.
Colector de delgas : Conmutador sincronizado con el rotor y encargado de que se
mantenga el ngulo relativo entre el campo del estator y el creado por las corrientes rotricas.
El par motor se produce por la interaccin de : Campo magntico inductor
estacionario + Ielctrica de un arrollamiento inducido giratorio.
Campo y Ielctrica se mantienen siempre en la misma posicin relativa gracias al
mecanismo de conmutacin formado por el colector de delgas y las escobillas.
En una bobina cerrada, por la que circula una I, sometida a un campo magntico, se induce una F
que la hace girar. Para mantener la rotacin en el mismo sentido es necesario conmutar el sentido de
la I
Control por inducido : Campo magntico cte y Ielctrica
variable
Entrada
Tensin
Control por excitacin : Campo magntico variable y
Ielctrica cte
Salida
Velocidad
SERVOMOTOR DE CC : Motor DC + Engranajes + Sensor de posicin + Controlador
proporcional.
Entrada en tensin y salida de posicin angular.
Incluye control de posicin : Minimizacin de la diferencia entre la posicin
actual y la deseada.
Reduccin del movimiento integrada.
Controlado por seales PWM Fcil implementacin con microcontroladores
PROBLEMAS DE LOS MOTORES DC CON ESCOBILLAS
72
Ielctrica por el rotor Dificultad de disipacin trmica Limitacin de P
Chispas Riesgo de explosin
Calentamientos a bajas velocidades con par alto. No es posible mantener el par
con el rotor parado ms de unos segundos, debido a los calentamientos que se producen en el
colector.
Desgaste de escobillas ( obligado mantenimiento de las mismas )
Dificultades de fabricacin ( bobinados,.)
SOLUCIN : Para evitar estos problemas, se han desarrollado los motores DC sin
escobillas
A.2
SIN ESCOBILLAS ( MOTOR BRUSHLESS )
Rotor : No tiene bobinado, est compuesto por imanes permanentes Se evitan las
fluctuaciones en el campo magntico de excitacin.
Estator : Conserva el bobinado, que puede ser mediante espiras serigrafiadas Inercia
Desaparecen las escobillas y las delgas Menor mantenimiento.
Las bobinas del estator se conectan a la electrnica de control, que las activa secuencialmente,
atrayendo al rotor.
Es necesario detectar de posicin del rotor.
B
MOTOR DE CORRIENTE ALTERNA ( AC )
B.1
DE INDUCCIN ( ASNCRONO )
Estator : Formado por 3 devanados divididos en 2 mitades, dispuestos en posiciones
diagonalmente opuestas y desfasados 120 entre s.
Rotor : Barras cortocircuitadas elctricamente mediante anillos en los extremos ( jaula de
ardilla ).
Obtencin del campo magntico giratorio : Alimentacin trifsica de las bobinas del estator.
El campo magntico giratorio arrastra al rotor y produce el movimiento.
deslizamiento = Diferencia entre v del campo magntico giratorio y vgiro del rotor ( que es
ms baja, del orden del 5% ).
Control de v mediante variacin de la f de la Valimentacin, con un convertidor de f o un variador de v
No presentan problemas de mantenimiento ni de calentamiento.
Mayor P, a igualdad de peso, que el motor DC.
73
B.2 SIN ESCOBILLAS ( SNCRONO )
Estator : Donde se sita el inducido formado por 3 devanados iguales decalados 120 elctricos y
alimentado por un sistema trifsico de tensiones ( similar al motor de induccin ).
Rotor : Donde se sita el inductor formado por imanes permanentes.
El estator genera un campo magntico giratorio que arrastra al rotor y produce el movimiento.
deslizamiento : v del campo magntico giratorio y vgiro del rotor iguales.
La vgiro slo depende de la f de la V que alimenta al inducido
precisin, el control de v se realiza mediante un convertidor de f
Para poder variar sta con
Mtodo de control autosncrono ( o autopilotado ) : Para evitar la prdida de
sincronismo se utiliza un sensor de posicin continuo que detecta la posicin del rotor y
permite mantener en todo momento el ngulo que forman los campos del estator y del rotor.
C MOTOR PASO A PASO
De imanes permanentes : El rotor, con polarizacin magntica cte, gira para orientar sus
polos de acuerdo al campo magntico creado por las fases del estator.
Polaridad del estator variable, controlada por trenes de pulsos : La seal de control
son trenes de pulsos que van actuando rotativamente sobre una serie de electroimanes
dispuestos en el estator.
Por cada pulso recibido, el rotor gira un determinado n discreto de grados.
La f de los pulsos debe ser aumentada progresivamente.
Ligeros, fiables y fciles de controlar. Pnominal y precisin ( mnimo ngulo girado
) bajas.
Aumentando el n polos del rotor mediante distribucin de dientes, se
aumenta la resolucin
PRINCIPAL APLICACIN : Giro de pinzas y mesas posicionadas
SECUENCIAS DE EXCITACIN :
Wave
drive
Normal
Medio
paso
D
Slo se activa una bobina simultneamente ( mnimo par ).
Se activan 2 bobinas consecutivas simultneamente ( par ms elevado ).
Se activan 2 bobinas consecutivas simultneamente, luego slo una y as
sucesivamente ( mayor resolucin ).
RESUMEN DE CARACTERSTICAS DE ACTUADORES PARA ROBOTS
74
5.4.2
TRANSMISIONES
Elementos encargados de llevar ( transmitir ) el movimiento desde los elementos motores (
actuadores ) hasta las articulaciones, y eventualmente, realizar una conversin del mismo.
JUSTIFICACIN DE LA NECESIDAD DE SISTEMAS DE TRANSMISIN :
Un robot mueve su extremo con aceleraciones elevadas Es importante reducir al mximo
su momento de inercia.
Los pares estticos que deben vencer los actuadores dependen directamente de la distancia a
las masas al actuador Se procura que los actuadores, por lo general pesados, estn
lo ms cerca posible de la base del robot.
CARACTERSTICAS BSICAS DE UN BUEN SISTEMA DE TRANSMISIN :
1
2
Tamao y peso reducidos
Alto mecnico ( lo ms cerca del 100% )
No debe afectar a la calidad del movimiento que transmite ( ya sea por el
rozamiento inherente a su funcionamiento o por las holguras que su desgaste pueda
introducir ) Se ha de evitar que presente juegos u holguras
considerables.
Capaz de soportar un funcionamiento continuo a par elevado y pares
elevados puntuales, y a ser posible entre grandes distancias.
( Ciclos cortos de funcionamiento Arranques y paradas continuos )
SISTEMAS DE TRANSMISIN Y CONVERSIN DE MOVIMIENTO PARA ROBOTS
Aunque un sistema de transmisin especfico para robots, s hay algunos usados con mayor
frecuencia. La clasificacin se ha realizado en base al tipo de movimiento posible en la entrada y la
salida : Lineal o circular.
Engranajes
Correas dentadas y
Cables y
Transmisin del
cadenas
varillas
movimiento circular
rboles
Sistemas
Acoplamiento
articulados bielamanivela
s flexibles
75
Conversin de
movimiento circular
a lineal
Conversin de
movimiento lineal a
circular
5.4.3
Tornillos sin fin ( husillo de
bolas )
Sistemas
de palancas
Engranajes de cremallera
Sistemas
bielamanivela
Paralelogramos
articulados
REDUCTORAS ( REDUCTORES )
FUNCIN : Adaptar el par y velocidad
de salida del actuador a valores
adecuados para el movimiento de los
eslabones del robot.
Al contrario que con las transmisiones, hay determinados sistemas reductores usados de
manera preferente en robots industriales. Esto se debe a que a los reductores usados en
robtica se les exige unas condiciones de funcionamiento muy restrictivas. Exigencia motivada por
las altas prestaciones que se le piden al robot en cuanto a precisin y v de posicionamiento.
Especficos para robots Altas prestaciones
Tendencia a ejes coaxiales frente a los | | o que ocupan menor
espacio y mejor
Diseos especiales : Harmonic Drive y Cyclo
CARACTERSTICAS DESEABLES EN LAS REDUCTORAS DE LOS ROBOTS :
1
Bajo peso y reducido tamao
Bajo rozamiento ( Alto )
Alta relacin de reduccin : Capacidad de realizar una reduccin elevada de v en un
76
nico paso.
4
Bajo momento de inercia
Holgura mnima : Se busca que el juego angular ( ngulo que gira el eje de
salida cuando se cambia su sentido de giro sin que llegue a girar el eje de entrada ) sea lo
menor posible.
Alta rigidez a la torsin Rigidez torsional : Par que hay que aplicar sobre
el eje de salida para que, manteniendo bloqueado el de entrada, aqul gire un ngulo
unitario.
Los reductores, por motivos de diseo, tienen una ventrada (max ) admisible, que como regla general
a medida que tamao del motor.
Existe una limitacin en cuanto al par de salida nominal permisible ( T2 ) que depende
del par de entrada ( T1 ) y de la relacin de transmisin a travs de la relacin :
T2 T1 ( 1 / 2 )
El rendimiento puede acercarse al 100% y la relacin de reduccin de velocidades (
1 = velocidad rotacional de entrada; 2 = velocidad rotacional de salida ) vara entre 50 y 300
A REDUCTORA HARMONIC DRIVE
Inventada en 1955 por C. Walton
Musser ( USA patent n. 2.906.143 )
HDUC
COMPONENTES : Corona circular exterior fija y rgida con dentado interior ( circular
spline )( CS ) + Vaso flexible ( flexpline )( FS ) fijado al eje de salida y con dentado
exterior que engrana en el del CS + Rodamiento elipsoidal ( wave generator )( WG
) al que se fija el eje de entrada.
La diferencia de dientes entre el CS y el FS es de 1 2.
FUNCIONAMIENTO : Interiormente al FS gira el WG que deforma al FS, poniendo en contacto la
CS con la zona del FS correspondiente al mximo dimetro de la elipse.
Al girar el WG se obliga a que los dientes exteriores del FS engranen uno a uno con los dientes
Z ( N c N f ) , tras una
interiores del CS, de modo que al haber una diferencia de dientes
vuelta completa del WG, el FS solo habr avanzado Z dientes.
RELACIN DE REDUCCIN :
REDUCTORA CYCLO
n ( Z / Nf ) ( Nc / Nf ) 1
77
Se sustituye el :
WG por una leva excntrica unida al rbol de
entrada.
CS por unos rodillos exteriores fijos.
FS por un disco de curvas que encaja en el rbol
de salida a travs de unos pernos de arrastre.
Sistema de reduccin basado en el movimiento cicloidal de un disco de curvas movido por una
leva excntrica solidaria al rbol de entrada.
Por cada revolucin de la excntrica, el disco de curvas avanza un saliente rodando sobre
los rodillos exteriores fijos. Este avance arrastra a su vez a los pernos del rbol de
salida que describirn una cicloide dentro de los huecos del disco de curvas.
RELACIN DE REDUCCIN : Determinada por el n salientes. Igual a la diferencia entre n
rodillos exteriores y n huecos del disco de curvas.
n ( N rodillos N huecos )
5.4.
4
ACCIONAMIENTO DIRECTO [ DIRECT DRIVE ( DD ) ]
Es una alternativa a las reductoras.
Solucin ideal desde el punto de vista del control y v.
Exige motores con par muy alto ( generalmente muy voluminosos ).
El eje del actuador se conecta directamente a la carga o articulacin, sin la
utilizacin de un reductor intermedio. Suele utilizarse exclusivamente para
robots con accionamiento elctrico.
Aparece debido a la necesidad de utilizar robots en aplicaciones que exigen combinar gran precisin
con alta v. Las reductoras introducen efectos negativos ( juego angular, rozamiento ) que pueden
impedir alcanzar los valores de precisin y v requeridos.
VENTAJAS DE LA UTILIZACIN DE LOS DD
1 Posicionamiento rpido y preciso, pues se evitan los rozamientos y juegos de las
trasmisiones y reductoras.
2
Aumento de las posibilidades de controlabilidad del sistema a costa de una
mayor complejidad
Simplificacin del sistema mecnico al eliminarse el reductor
Disminuyen la friccin, elasticidad, e histresis
DESVENTAJAS DE LA UTILIZACIN DE LOS DD
78
El principal problema en la aplicacin de un DD es el motor a emplear : Tienen que ser
motores que proporcionen un par elevado a bajas revoluciones ( las de
movimiento de la articulacin ) manteniendo la mxima rigidez posible.
Motores para DD que cumplen estas caractersticas : Motores DC, o brushless, o
sncronos con imanes permanentes fabricados con materiales especiales (
samariocobalto ) de bajo peso.
Otra cuestin importante en el empleo de un DD es la cinemtica del robot : Colocar
motores pesados y voluminosos junto a las articulaciones, no es factible
para todas las configuraciones del robot debido a las inercias que se
generan Condiciona la estructura mecnica.
Por ello, los robots de DD son generalmente de tipo SCARA, cuyo diseo se
corresponde bien con las necesidades que el DD implica.
El codificador de posicin va directamente acoplado al eje Necesita ser
mucho ms preciso Al eliminar la reductora se disminuye la resolucin real del
codificador de posicin acoplado al eje. Utilizacin en los DD de codificadores de
posicin de resolucin muy alta.
Al no tener reductoras, la ley de control no se simplifica El control debe
ser mucho ms sofisticado.
Las perturbaciones inciden directamente sobre el par motor ( sin verse divididas
por el cuadrado de la reduccin como en las reductoras ).
4
5
EL primer robot comercial con DD se present en 1984. Era un robot SCARA llamado
AdeptOne, de la compaa norteamericana Adept Technology, Inc. A partir de entonces este tipo
de robots se ha hecho popular para aplicaciones que requieran robots con altas
prestaciones en posicionamiento y v : Montaje microelectrnico, corte de metal por lser,
5.
5
SISTEMA SENSORIAL ( SENSORES )
5.5.1
1
PROPIEDADES IMPORTANTES DE LOS SENSORES
Rango
de medida
Precisin
Resolucin
Diferencia entre los valores mnimos y mximos medibles.
Dominio de la magnitud medida en el que puede aplicarse el sensor.
Rango dinmico :
Desviacin de la lectura de un sensor respecto a una entrada conocida.
Mximo error esperado en la medida.
Valor de incremento de medida ms pequeo detectable.
Mnima variacin de la magnitud de entrada que puede apreciarse en la salida.
RD 10 Log ( Vmax / Vmin ) ( dB )
79
La resolucin puede ser de menor valor que la precisin.
La precisin no puede ser inferior a la resolucin.
Error
Diferencia entre el valor medido por el sensor y el valor real.
Sensibilida
d
Razn de cambio de la salida a los cambios en la entrada.
Relacin entre variacin de la magnitud de salida y la variacin de la magnitud
de entrada.
( r / r ) S ( x / x ) [ r : Seal del sensor ][ x : Cantidad medida ][ S : Sensitividad ]
Linealidad
Medida de la constancia del ratio ( entrada / salida ).
Excitacin
Cantidad de Ielctrica requerida para su funcionamiento.
Estabilidad
Medida de la posibilidad de un sensor de mostrar una misma salida en un
rango en el que la entrada permanece cte.
Tiempo
de
respuest
a
Desviacin de 0 : Valor de la variable de salida cuando la
variable de entrada es nula.
Si el rango de medida no llega a valores nulos de la variable de entrada Lo
habitual es establecer otro punto de referencia para definir el offset.
10
Offset
11
Repetitividad
Tiempo requerido para que un cambio de la entrada sea medible.
5.5.2
Diferencia entre sucesivas medidas de la misma entrada.
Error esperado al repetir varias veces la misma medida.
SENSORES DE POSICIN
POTENCIMETROS
Miden desplazamientos lineales o angulares.
Utilizan caractersticas elctricas y principalmente son utilizados como sensores
internos.
DESVENTAJAS :
Bajas prestaciones Desgaste del material ( debido al rozamiento )
Ruido elctrico v limitada Los elementos resistivos no son continuos (
La resistencia vara con la T )
Deben estar fijados al dispositivo cuyo desplazamiento se desea medir.
VENTAJAS : Facilidad de uso Bajo precio
COMPONENTES : Constan de una resistencia ( resistance element ) a travs de la cual
hay una determinada diferencia de potencial ( V ). Unido a la resistencia hay un contacto (
80
wiper )( movable slider ) que puede deslizarse a su alrededor. El wiper se conecta al elemento
cuyo movimiento vamos a medir. Cuando el elemento se mueva, el wiper se ir moviendo por la
V
V
resistencia y la Vsalida ( s ) en el wiper ir cambiando. Si medimos est s , podremos
determinar cunto se ha desplazado el wiper y por lo tanto cunto se ha desplazado el elemento
que pretendamos controlar.
Vs V ( / max )
VBC VAC ( R BC / R AC )
VAC
: Voltaje de referencia
VBC
: Voltaje de salida variable
R BC
: Resistencia entre tierra y eje
R AC : Resistencia total del potencimetro
ENCODERS PTICOS ( CODIFICADORES ANGULARES DE POSICIN )
Utilizados para medir la posicin angular. Permiten detectar el movimiento de
rotacin de un eje.
Convierten el movimiento en una secuencia de pulsos digitales.
Contando un solo bit o descodificando un conjunto de ellos, los pulsos se
pueden convertir en medidas de posicin relativas o absolutas.
Configuracin lineal o rotativa ( ms utilizada ).
COMPONENTES Los rotativos se componen bsicamente de : Disco plstico
transparente [ con una serie de marcas opacas colocadas radialmente y equidistantes entre s;
y acoplado al eje cuya posicin angular se quiere medir ] + Elementos emisores de luz [
diodos LED o un sistema de iluminacin en el que la luz es colimada ( proceso de hacer | | 2
rayos de luz entre s ) de forma correcta ] + Fotorreceptores [ elementos fotosensibles que
actan como receptores ]
FUNCIONAMIENTO : Cuando el sistema comienza a funcionar, el emisor de luz empieza a
emitir; a medida que el eje gira se van generando pulsos de luz en el receptor, correspondientes a
la luz que atraviesa los huecos entre las marcas. Contando estos pulsos es posible conocer la
posicin del eje.
Problema de deteccin del sentido de giro El no saber si en un momento dado se
est realizando un giro en un sentido o en otro, conlleva el peligro de no estar contando
adecuadamente
B.1
ENCODER PTICO INCREMENTAL ( ENCODER RELATIVO )
Mide posiciones angulares relativas : N pulsos proporcional al ngulo girado.
Realmente mide la vrotacin, de la cual se puede obtener la posicin angular relativa.
Da salidas serie de acuerdo con el ngulo del eje de rotacin, mientras ste gira.
OBTENCIN DEL SENTIDO DE GIRO : Mediante otra franja de marcas desplazada de la
anterior, de manera que el tren de pulsos que con ella se genere est desplazado 90 elctricos con
respecto al generado por la 1 franja. Hay 2 trenes de pulsos desfasados 90 para
determinar el sentido de giro. Con un circuito es posible obtener una seal adicional
81
que indique el sentido de giro, y que acte sobre el contador correspondiente indicndole que o
la cuenta que est realizando.
Es necesario una marca de referencia ( marca de paso por 0 ) sobre el disco que
indique que se ha dado una vuelta completa, y que por tanto, se ha de empezar la cuenta de nuevo.
La marca sirve tambin para poder comenzar a contar tras recuperarse de una cada de tensin.
Precisa : Contador de impulsos ( para conocer la posicin del eje ) y de posicin de
puesta a 0
RESOLUCIN : Se mide por el n pulsos de la salida por cada revolucin del eje.
Depende directamente del ( n de marcas / franja ) que se pueden poner
fsicamente en el disco.
Pueden obtenerse hasta 100000( pulsos / vuelta ) Mtodo para aumentar la resolucin :
Contabilizar no solo los flancos de subida de los trenes de pulsos, sino tambin los de bajada.
Codificacin de los 4 estados posibles de un encoder
incremental : Utilizacin de cdigo binario
Las ranuras de la salida A estn desplazadas ( 1/4 +
1/8 ) de periodo T respecto de las de la salida B.
Diferencia de fase ( sentido de giro ) : Si gira
en sentido horario, la fase A est adelantada, y si gira
en sentido antihorario, est retrasada respecto de la
fase B.
Z : Indicador absoluto de una revolucin.
B.2
Pulsos por revolucin ( PPR ) : N pulsos que
genera un canal para girar 360
Resolucin real de [ 360 / ( 4PPR ) ] y 2 canales.
ENCODER PTICO ABSOLUTO ( ENCODER ABSOLUTO )
Mide posiciones angulares absolutas.
Mide exactamente la posicin angular, de la cual se puede obtener la v. En este caso lo que se va
a medir no es el incremento de esa posicin, sino la posicin exacta.
Da una salida paralelo ( codificada en BCD o Gray ) indicando la posicin angular del eje.
82
COMPONENTES : Disco transparente rotativo con n series de bandas concntricas
translcida/opaca que interceptan el paso de la luz en parejas fotodiodofotorreceptor
Se tiene :
Fuente de luz ( con las lentes de adaptacin correspondientes ) + Disco graduado +
Fotorreceptor
El disco se divide en un n determinado ( potencia de 2 ) de sectores
concntricos, cada uno con un ranurado distinto, codificndose cada uno de
ellos segn un cdigo binario nico, que queda representado en el disco por zonas
transparentes y opacas dispuestas radialmente.
No es necesario ningn contador o electrnica adicional para detectar el
sentido de giro, ya que cada sector angular es codificado de forma absoluta.
RESOLUCIN : Fija, y viene dada por el n bandas ( anillos ) que tenga el disco
graduado, o lo que es lo mismo, por el n bits del cdigo utilizado. Resoluciones
desde 28 a 219 bits
USOS : En aplicaciones que estn mucho tiempo sin moverse o con
desplazamientos lentos.
Cdigo
Gray
Cdigo
binario
Fuente :( Sensors and Methods for Mobile
Robot Positioning )( J. Borenstein, H. R.
Everett, L. Feng )( pag.16 ) : Una fuente lineal
de luz pasando a travs de un patrn codificado
de segmentos opacos y transparentes sobre un
disco codificador rotativo, resulta en una salida
paralelo que nicamente especifica la posicin
angular absoluta del eje.
Cdigo Gray absoluto frente a cdigo Binario : Codificar en cdigo Gray es la mejor
opcin ya que como 2 combinaciones binarias consecutivas slo difieren en un solo bit, se impide
la aparicin de combinaciones errneas que pueden proporcionar informacin incorrecta la realizar
la medida.
Con cdigo Gray, solo un bit cambia a la vez, una ventaja que elimina ambigedades asncronas causadas
por la electrnica y las tolerancias de los componentes mecnicos.
El cdigo binario, por otro lado, involucra mltiples cambios de bit cuando se o la cuenta en 1. Por
ejemplo, al ir de la posicin 255 a la posicin 0, 8 bits cambian de 1s a 0s.
a( Disco codificado en cdigo Gray absoluto ) : La
rotacin en sentido antihorario por un incremento posicin,
provocar solo el cambio de 1 bit.
b( Disco codificado en cdigo binario ) : La misma
rotacin, provocar que todos los bits cambien, para el caso
particular ( 255 a 0 ) ilustrado por la lnea horaria de
referencia de las 12.
83
( RESOLVER / SINCRORESOLVER )( CAPTADORES ANGULARES DE POSICIN )
Bobina mvil ( conectada al eje de giro ) + ( 2 3 ) bobinas fijas situadas
alrededor de la mvil
FUNCIONAMIENTO : Al excitar la bobina mvil con una seal portadora
sinusoidal ( 400 Hz ), en las bobinas fijas se inducen tensiones cuyo valor
eficaz depende del ngulo girado
CARACTERSTICAS : Tecnologa analgica Resolucin ilimitada dado el
carcter continuo de la seal Bajo momento de inercia
Resolver 1 bobina mvil + 2 bobinas fijas desfasadas 90 : El giro de la bobina
mvil hace que el acoplamiento con las bobinas fijas vare, consiguiendo que la seal resultante
en stas dependa del ngulo de giro . La bobina mvil excitada con tensin vr V sen( t ) y
girada un ngulo induce en las bobinas fijas situadas en cuadratura las tensiones :
V1 vr sen( ) V2 vr cos( )
Symbolic
representation
Schematic of Rx
Output voltage relationships
Sincroresolver 1 bobina mvil + 3 bobinas fijas desfasadas 120, formando
un sistema trifsico en estrella : Para un giro de la bobina mvil excitada con tensin
V sen( t ) , y suponiendo que los acoplamientos y los desfases son los mismos para todos los
devanados, se obtienen las siguientes tensiones entre las fases del estator :
V13 3 V cos ( t ) sen( ) V32 3 V cos ( t ) sen( 120 ) V21 3 V cos ( t ) sen( 240 )
E S(max) NE R 1 R 2 Line to Line level ( RMS )
Symbolic
representation
Schematic of Cx
Output voltage relationships
84
TRANSFORMADOR DIFERENCIAL DE VARIACIN LINEAL
Sensor de posicin lineal analgico que utiliza caractersticas
elctricas/magnticas.
LVDT
FUNCIONAMIENTO : Consta de un ncleo ferromagntico unido al eje cuyo
desplazamiento se quiere medir, y que se mueve linealmente entre 1 devanado 1 y 2
devanados 2os ( conectados en oposicin ) haciendo con su movimiento que vare la
inductancia entre ellos.
Al mover el ncleo, la tensin alterna del 1 induce tensiones diferentes en los
2os ( aumenta en uno y disminuye en otro ) que son proporcionales al
desplazamiento del eje.
VENTAJAS : Alta linealidad y repetitividad, resolucin ilimitada, bajo rozamiento
INCONVENIENTE : No permite medir grandes desplazamientos Slo es
utilizado en la medicin de pequeos desplazamientos.
Eo depende linealmente del desplazamiento del vstago
solidario al ncleo mvil La amplitud de la
seal de salida es proporcional al
desplazamiento del ncleo.
Sentido de desplazamiento en funcin de la
fase de la seal de salida con respecto a la
seal de excitacin.
TRANSDUCTOR MAGNTICO ( REGLA MAGNTICA )( INDUCTOSYN
Funcionamiento similar al del resolver ( lineal y rotativo )
El rotativo est formado por 2 devanados 2os mviles y un 1 fijo. Al alimentar
v
el devanado fijo con una tensin alterna e , en los 2os se inducen tensiones
proporcionales al desplazamiento del eje.
Caractersticas : Bajo rozamiento Resolucin ilimitada
El lineal est formado por 2 reglas que se desplazan una sobre otra, con circuitos ( pistas )
dibujados sobre cada una en forma de lneas almenadas ( espiras ). En la fija, las espiras ocupan
85
toda su longitud, y en la mvil, que se desplaza sobre la fija con sus espiras superpuestas, pero sin
contacto elctrico con las de la fija, hay 2 grupos de espiras, desfasadas ( 1 / 4 ) de periodo.
v
Al aplicar una e alterna a la fija, en los grupos de espiras de la mvil se inducen las tensiones
e1 y e2 , donde x es el desplazamiento lineal de la mvil desde el inicio de su recorrido, y la
longitud de una espira de la escala. A partir del valor eficaz de e1 y e2 es posible extraer el valor de
x.
ve V sen ( t )
e1 E sen ( t )
e2 E sen [ ( t ) ]
vi a sen ( t )
v1 b sen [ ( 2 x ) / p ] sen ( t )
v2 b cos [ 2 ( x d ) / p ] sen ( t )
La distancia d entre los 2os se ajusta de modo que sus seales estn desfasadas 90
5.5.3
SENSORES DE VELOCIDAD
Generalmente miden la velocidad angular.
Necesarios para mejorar el comportamiento dinmico de los actuadores.
Se pueden utilizar sensores de posicin para medir v, teniendo en cuenta el
tiempo que se tarda en alcanzar una determinada posicin Una opcin usada
para el caso de que la UC del robot precise valorar la vgiro de las articulaciones, es derivar la
informacin de posicin que sta posee.
Diferenciacin de las medidas de posicin :
Medida directa en el eje de giro :
TACMETR
O
CONVERTID
OR
(fV)
5.5.4
Convertidor ( f
V)
Diferenciacin digital
Tacmetro ( Tacogenerador )( Tacodinamo )
De IDC o IAC, con resoluciones del orden de 10( mV / rpm ).
El rotor, dotado de imn permanente y unido al eje cuya v se quiere medir,
induce una V en el estator proporcional a la vgiro del eje. Se convierte Convertir
la Erotacional del eje en Eelctrica proporcional a la rotacional.
Tecnologa electrnica : Produce una Vsalida proporcional a la f de un tren de
pulsos, que puede provenir de un sensor de posicin digital, o bien de un
sensor de posicin analgico a travs de una conversin analgicadigital
SENSORES DE PRESENCIA ( DE PROXIMIDAD )
Detectan la presencia ( o ausencia ) ( no la distancia ) de un objeto en un
intervalo de distancia ( dentro de un radio de accin ) determinado.
Se basan en el cambio provocado en alguna de sus caractersticas debido a la
proximidad del objeto.
86
Se pueden utilizar para fijar la forma de agarrar o evitar un objeto.
En robtica se utilizan como auxiliares de los detectores de posicin, para indicar
los lmites de movimiento de las articulaciones y permitir localizar la posicin de referencia 0
de stos en el caso de que sean incrementales.
La deteccin puede hacerse con o sin contacto con el objeto :
Se trata de un interruptor, normalmente abierto o cerrado segn
interese, actuado mecnicamente a travs de un vstago u otro
dispositivo.
Inconvenientes : Problemas de mantenimiento,
desgaste mecnico y de los contactos.
Con
contacto
Electromecnicos
( Fines de
carrera
mecnicos )
Se utilizan diferentes principios fsicos para detectar presencia ( sin necesidad de
contacto con el objeto ). Tipos :
Sin
contacto
Magnticos :
Inductivos
PTICOS
Reed switches
( Contacto
elctrico )
De efecto Hall
Vh R h [ ( I B ) / e ]
Capacitivos
Magnetoresistivos
pticos
Detectan la reflexin sobre el objeto del rayo de luz procedente del
emisor.
Ejemplos : Palpador fotoelctrico de reflexin directa, barrera fotoelctrica rflex,
barrera fotoelctrica, sensores de horquilla, sensores de fibra ptica, sensores de
contraste/luminosidad/color, cortinas fotoelctricas.
Configuraciones variables :
Emisor y receptor
independientes
Tipo barrera
INDUCTIV
OS
[ Emisor ( diodo LED ) + Receptor ( fotodiodo ) ] en un nico encapsulado
Tipo
retrorreflectivo
Tipo reflexin
difuso
Tipo convergente
Slo detectan la presencia de objetos metlicos a pequeas
distancias.
Insensibles a materiales no metlicos. Permiten gran variedad de
encapsulados.
INCONVENIENTE : Distinto comportamiento segn del tipo de metal.
FUNCIONAMIENTO : Se basan en el cambio de inductancia que
provoca un objeto metlico en un campo magntico.
( Bobina sobre ncleo de ferrita + Oscilador ) genera un campo
de RF ( 100KHz a 1MHz ) Cuando un objeto metlico penetra o
abandona el campo del imn, el cambio producido en dicho campo induce una I
en la bobina. Si se detecta una I en la bobina, es que algn objeto metlico ha
entrado en el campo del imn.
Las corrientes inducidas ( corrientes de Foucault )( Eddy currents
) originan una variacin de la inductancia L de la bobina (
87
aumentan las prdidas ) lo que puede llegar a colapsar el
oscilador ( ECKO : Eddy Current Killed Oscilator )
Este efecto se detecta, filtra, amplifica, y se compara con un umbral.
Distancia de deteccin : Menor que el dimetro ( d ) de la bobina
sensora.
Depende del tipo de material y de la forma. Mayor distancia cuanto
ms resistivo sea el metal. Distancia lateral mnima entre sensores
= 2d aprox.
TIPOS : Apantallados ( ms robustos ) y sin apantallar ( mayor rango )
CAPACITIV
OS
INCONVENIENTES : Problemas de trabajo en condiciones hmedas y
con puestas a tierra defectuosas
FUNCIONAMIENTO : Basados en la deteccin de un cambio en la
capacidad ( al variar el dielctrico ) del sensor, provocado por una
superficie prxima a ste.
MAGNTIC
OS
Detectan la presencia de objetos metlicos y no metlicos a
pequeas distancias.
Constan de 2 elementos principales : El elemento cuya capacidad se altera ( que
suele ser un condensador formado por electrodos ) y el dispositivo que detecta el
cambio de capacidad ( un circuito electrnico conectado al condensador ).
Este efecto se detecta, filtra, amplifica, y se compara con un umbral.
Distancia de deteccin : La mitad del dimetro del sensor
Depende del tipo de material y de
la forma
Detectan la presencia de objetos ferromagnticos por la
deformacin que stos provocan sobre un campo magntico.
Detectan la ( presencia / variacin ) de un campo magntico
externo ( normalmente creado por un imn permanente ).
5.5.5 SENSORES DE FUERZA
Permiten determinar las fuerzas y pares ejercidos sobre el elemento terminal,
durante la ejecucin de una tarea.
Pueden utilizarse para percibir la forma o posicin de un objeto : Midiendo la
fuerza ejercida en la superficie de contacto sobre un cierto n captadores
puntuales.
GALGAS
EXTENSIOMTRI
CAS
Varan su resistencia elctrica al deformarse.
De hilo : Hilo dispuesto en zigzag sobre un soporte elstico.
De semiconductor : Pista de semiconductor en un ncleo
de silicona.
En ambos casos al someter a traccin a la galga, se estira y
disminuye su seccin, con lo que vara su resistencia
elctrica.
88
CLULA DE
CARGA
5.5.6
Montaje meticuloso y calibracin laboriosa.
Medida de fuerzas de flexin Medida de fuerzas de
traccin y torsin
Conjunto integrado de galgas formando un elemento unitario de medida de
fuerzas o pares.
SISTEMAS TCTILES ( PARA RECONOCIMIENTO DE FORMAS )
Indican el contacto de algn objeto slido con ellos mismos. Proporcionan
informacin acerca del contacto. Se suelen colocar en la pinza para controlar la
manipulacin de objetos.
Son sensores de fuerza constituidos por una
matriz de elementos de deteccin de fuerzas.
Cada uno de los sensores de fuerza que componen
la matriz suele ser una almohadilla elastomrica,
que al comprimirse cambia su resistencia elctrica de
manera proporcional a la F aplicada. Midiendo esa
resistencia se puede obtener informacin acerca de la F.
Permiten reconocer formas en los objetos que se estn
manipulando.
Resolucin : Vendr dada por la dimensin de la matriz de sensores.
Factor importante y que puede resultar un problema al disear este tipo de
sensores : El grado de desgaste de la superficie de contacto.
Aplicacin : Insercin de piezas con realimentacin
tctil
Proceso de introduccin de una pieza en un agujero : En un
momento dado, el robot puede conocer la posicin en la que se
encuentra la pieza gracias a la informacin de los arrays
tctiles, como se puede ver en los 2 patrones.
5.5.7
SENSORES DE DISTANCIA
Rango de 15cm a 20m
Ultrasonido Baja precisin : Depende de condiciones ambientales.
s
Incertidumbre de la procedencia del eco.
Cortas distancias ( mm a 10m ).
Lser Triangulacin
Precisin no uniforme en el rango de medida.
Medida del
Medida del tiempo de vuelo : Grandes distancias ( >50m )
tiempo
Medida del desfase : Distancias cortas y medias ( 20cm a 100m )
de propagacin
5.5.8 SENSORES DE CONTACTO
Solo indican si ha habido contacto o no con algn objeto, sin considerar la
magnitud de la fuerza de contacto.
USOS : Situados en la pinza para determinar cundo se ha cogido un objeto, formando parte de
89
sondas de inspeccin para determinar dimensiones de objetos, o situados en el exterior de la pinza
para ir tanteando un entorno.
MICROINTERRUPTOR
PALANCA
Similar al microinterruptor pero
flexible, permitiendo que el robot
no sea daado al avisar antes de la
colisin.
Dispositivo elctrico que es
pulsado al contactar con el
objeto, cambiando de estado
( funciona de forma binaria ).
Funciona por p.
SENSORES DE FUERZA Y TORSIN
Su medida es proporcional a la p local que se ejerce.
Un dispositivo simple es una varilla unida a un eje giratorio. El conocimiento
del giro realizado indica cunto se ha comprimido el resorte. Conociendo la Cte
DE PRESIN
del resorte se conoce la F aplicada.
Destacan las pieles artificiales, preparadas para medir la p ejercida sobre
ellas. Se basan en la disminucin de resistencia de los materiales al ser
comprimidos.
Elemento sensorial bsico para la construccin de sensores de fuerza. Se
aprovecha la relacin entre la ( tensin / deformacin ) aplicada al material y su
GALGAS DE
resistencia elctrica ( R ) para poder medir la tensin.
TENSIN O
Tensin = Deformacin por unidad de longitud : (l / l )
DEFORMACI
Para evitar la dependencia de la R con la T y a su vez medir esas pequeas
N
variaciones y traducirlas en voltaje se utiliza un puente de Wheatstone,
que permite a su vez paliar el efecto de la T.
Se suelen utilizar materiales semiconductores o lminas metlicas.
R2
R4
Vin
Vout
R1 R 2 R 3 R 4
DE
ARTICULACI
NY
MUECA
5.6
Hollow
cruciform
Se basan en galgas de
deformacin, pero dispuestas de
distintas formas segn su aplicacin.
Solid square
shaft
Sensores de articulacin
SISTEMA DE CONTROL
Los distintos aspectos que aborda son :
1) Tipos de control : CINEMTICO DINMICO
2) El problema general de control: programacin, control y tratamiento de la
informacin, y sistemas de percepcin.
3) Estructuras de control en funcin del tipo de robot.
5.6.1
CONTROL CINEMTICO
5.6.1.1
INTRODUCCIN
90
: Establecer cules son las trayectorias que debe seguir cada
articulacin del robot a lo largo del tiempo, para lograr los objetivos
especificados por el usuario :
OBJETIVO
Punto de destino, tipo de trayectoria del elemento terminal del robot,
tiempo invertido o v.
Eleccin de trayectorias en funcin de :
a) Las restricciones fsicas propias de los actuadores.
b) Los criterios de calidad de trayectorias : Suavidad Precisin
TRAYECTORIAS EN EL ESPACIO DE LA TAREA Y EN EL ARTICULAR
LIMITACIONES EN EL
CONTROL DE LOS
ACCIONAMIENTOS
5.6.1.2
FUNCIONES DEL CONTROL CINEMTICO
No siempre es posible
seguir cualquier
trayectoria articular.
91
1) Obtener la trayectoria cartesiana :
Convertir la especificacin del movimiento dada en
el programa, en una trayectoria analtica en
el espacio cartesiano ( espacio de la
tarea )( evolucin de cada coordenada
cartesiana en funcin del tiempo ).
2) Muestrear la trayectoria cartesiana,
obteniendo un n finito de puntos de la misma. Cada
punto vendr dado por : ( x, y, z, , , )
3) Utilizar el modelo cinemtico inverso
para convertir las coordenadas cartesianas de
cada punto obtenido en el muestreo, en sus
correspondientes coordenadas articulares :
( q1, q 2 , q 3 , q 4 , q 5 , q 6 )
Tener en cuenta : Posibles soluciones mltiples de la
transformacin homognea inversa, la ausencia de
solucin y puntos singulares, de modo que se
asegure la continuidad de la trayectoria.
Funcionamiento del control
cinemtico
Recibe como entradas los datos procedentes
del programa del robot escrito por el usuario
: Punto de destino ( x, y, z, , , ) ,
tipo de trayectoria deseada,
precisin del punto final y de la
trayectoria cartesiana, v,)
Apoyndose en el modelo cinemtico
inverso del robot establece las
4) Interpolacin de los puntos
articulares obtenidos, generando para cada
q (t ) que pase
variable articular una expresin i
o se aproxime a ellos de modo que, siendo una
trayectoria realizable por los actuadores, se
transforme en una trayectoria cartesiana lo
ms prxima a la especificada por el programa de
usuario ( en cuanto a precisin, v,).
q (t)
trayectorias articulares i
para
cada articulacin como funciones del
tiempo.
Las trayectorias articulares obtenidas
deben ser muestreadas con un perodo T a
decidir, generndose en cada instante kT un
5) Muestrear la trayectoria articular para
generar referencias para el control dinmico.
q (kT)
vector de referencias articulares i
para los algoritmos del control
dinmico.
EJEMPLO DE CONTROL CINEMTICO DE UN ROBOT DE 2 GDL
1
Especificacin del movimiento ( de la trayectoria cartesiana ) : El extremo del robot ha de moverse
en lnea recta desde j ( x , y ) a j ( x , y ) en un tiempo T
Muestreo de trayectoria cartesiana : El control cinemtico selecciona 4 puntos
( j1, j2 , j3 , j4 ) de esa trayectoria.
1
2
Obtencin de los vectores articulares ( q , q , q , q ) mediante la transformacin homognea
inversa.
Interpolacin de los puntos articulares y generacin de las trayectorias para cada articulacin :
Unir estos 4 puntos con algn tipo de funcin que pasando por todos ellos garantice la suavidad y no
92
supere las v y a mximas permisibles para cada actuador.
El movimiento final del extremo del robot es una trayectoria que se aproximar en mayor o menor
medida a la trayectoria rectilnea especificada por el usuario.
Principal INCONVENIENTE del procedimiento descrito para la generacin de trayectorias :
Necesidad de resolver repetidamente la transformacin homognea inversa, lo que conlleva un
elevado coste computacional. Alternativa : Utilizacin de la matriz Jacobiana ( J )
J establece las relaciones diferenciales entre variables articulares y variables cartesianas :
[ x
(f x / q1 ) (f x / q n )
y z ]T
(f / q1 ) (f / q n )
q 1
En forma
q n compacta
j( t ) J ( q ) q ( t )
:
Relacin lineal. Para una localizacin q determinada permite conocer las velocidades
cartesianas j( t ) a partir de las correspondientes velocidades articulares q ( t )
Si J(q) invertible ( lo que ocurrir siempre que las dimensiones del espacio articular y de la
1
tarea sean iguales y q no sea un punto singular ) q ( t ) J ( q ) j( t ) : Relacin lineal
Ms fcil de obtener que la que utiliza la transformacin homognea.
A partir de la trayectoria cartesiana j(t) deseada para el extremo del robot, podr obtenerse
su derivada j( t ) , y a travs de la relacin anterior, la velocidad articular q ( t ) que debe
seguir cada una de las articulaciones.
J(q) vara para cada localizacin q considerada
valores de los elementos de J
Es necesario actualizar continuamente los
La implementacin de este procedimiento en la UC de un robot, exigir la discretizacin de la
trayectoria cartesiana j(t) y de su derivada j( t ) en un n finito de puntos, que posteriormente, y
tras ser convertidos a velocidades articulares q ( t ) debern ser interpolados. Interpolar los
puntos seleccionados de la trayectoria que garanticen la obtencin de curvas realizables por los
actuadores.
Para estudiar el control cinemtico de un robot se deber conocer qu tipo de interpoladores
son eficaces para unir los puntos articulares ( en el espacio articular ) por los que se
quiere pasar.
Tambin es conveniente establecer criterios para seleccionar cuntos y qu puntos sern
muestreados en la trayectoria cartesiana [ del espacio cartesiano ( espacio de la
tarea ) ].
5.6.1.3
GENERACIN DE TRAYECTORIAS EN EL ESPACIO DE LA TAREA
( GENERACIN DE TRAYECTORIAS CARTESIANAS )
Normalmente el usuario del robot indica el movimiento que ste debe realizar
especificando las localizaciones espaciales ( posiciones y orientaciones ) por las que
debe pasar el extremo libre del robot, junto con otros datos adicionales : Instantes
de paso, v o tipos de trayectorias.
i
f
Es frecuente especificar que el robot debe ir desde un punto inicial j hasta otro final j , siguiendo en
cartesianas una lnea recta a v = cte.
93
Como estos puntos suelen estar muy separados
Es preciso seleccionar puntos
intermedios suficientemente cercanos como para que el control del robot
consiga ajustar no slo el punto final al especificado, sino tambin ajustar la
trayectoria seguida a la indicada en el programa.
Para ello se usa un determinado tipo de interpolacin de trayectorias : Es preciso
establecer un interpolador entre las localizaciones expresadas en el espacio de la tarea que
dar como resultado una expresin analtica de la evolucin de cada coordenada.
A
TIPOS DE INTERPOLACIN DE TRAYECTORIAS
La ms frecuente es la interpolacin lineal : Cada
i
coordenada evoluciona a v = cte desde su valor inicial j hasta
f
el final j
Entre 2 puntos
( Ej : lnea recta )
t ti
ji
j(t) ( jf ji )
tf ti
( t i , t f ) : Instantes de tiempo en los que se pretende alcanzar
la localizacin inicial y final, respectivamente.
Unidos mediante lneas rectas : Con discontinuidades
2.1
Entre mltiples
( paradas ) en los puntos de cambio.
puntos :
Unidos mediante otros interpoladores similares a los que
2.2
se vern en el apartado de control articular.
ESPECIFICACIN DE LA POSICIN Y DE LA ORIENTACIN
Especificacin de la posicin : Normalmente se realiza mediante coordenadas
cartesianas. Esta representacin hace que el procedimiento ms adecuado para unir 2 posiciones en
el espacio de la tarea es la evolucin lineal, a v = cte, de cada coordenada cartesiana desde
su valor inicial hasta el final, resultando un movimiento sencillo, de calidad, y fcilmente interpretable
por el usuario.
Especificacin de la orientacin : Puede realizarse mediante : Matrices de rotacin,
ngulos de Euler, par de rotacin o cuaternios, resultando en cada caso trayectorias
diferentes.
1) Matrices de rotacin : Su utilizacin lleva a resultados inconsistentes.
Deben ser ortonormales.
La interpolacin lineal entre una matriz de rotacin inicial y otra final lleva a matrices
intermedias no ortonormales, y que por lo tanto, no corresponden a matrices de rotacin.
2) ngulos de Euler ( en cualquiera de sus formas ) : Su utilizacin, adems de ser la
representacin ms compacta, no presenta el inconveniente anterior. Para pasar de una orientacin
( , , )
inicial i i i a una final ( f , f , f ) se pueden utilizar las funciones lineales :
t ti
t ti
t ti
i
i (t) ( f i )
i
(t) ( f i )
(t) ( f i )
tf ti
tf ti
tf ti
( t i , t f ) Instantes de tiempo en los que se pretende estar en la orientacin inicial y final.
Inconveniente de esta trayectoria : Desde el punto de vista del usuario, es una trayectoria no
intuitiva, con extraas evoluciones de la orientacin.
3) La evolucin ms natural desde una orientacin inicial hasta otra final, sera aquella que hace girar de
manera progresiva al efector final ( u objeto manipulado por el robot ) desde su orientacin inicial
hasta la final en torno a un eje de giro fijo. La utilizacin del par de rotacin, o su
94
equivalente, los cuaternios, es la manera ms adecuada para generar la trayectoria
cartesiana de orientacin.
Dado un sistema ortonormal inicial y otro final rotado respecto del 1, un nico eje k que permite
pasar del sistema inicial al final girando un ngulo respecto a l. Para que el extremo del robot
evolucione desde una orientacin inicial hasta la final, se podr buscar cul es el par de rotacin
( k, ) que relaciona los sistemas de coordenadas ortonormales asociados a ambas orientaciones, y
realizar la evolucin temporal mediante un giro en torno al eje k de valor :
(t) [ ( t t i ) / ( t f t i ) ]
A partir del valor de (t) para instantes concretos de tiempo
ser inmediato conocer el cuaternio correspondiente.
CONCLUSIN
1 No se pueden interpolar las MTH
2 Se pueden interpolar los ngulos de Euler y el par de rotacin ( y de l los cuaternios )
5.6.1.4
TIPOS DE TRAYECTORIAS
Para realizar una determinada tarea, el robot debe moverse desde un punto
inicial a un punto final. Este movimiento puede realizarse segn mltiples trayectorias
espaciales.
Las ms comunes, ya sea por su sencillez de implementacin por parte del control cinemtico o
por su utilidad para diversas tareas, son las que en la prctica incorporan los robots comerciales :
Trayectorias punto a
punto :
1.1
Movimiento eje a eje
1.2
Movimiento simultneo de ejes
Trayectorias coordinadas ( iscronas )
Trayectorias
continuas :
3.
1
3.
2
En el espacio cartesiano ( espacio de la tarea )
En el espacio articular ( espacio de las articulaciones
)
TRAYECTORIAS PUNTO A PUNTO
Cada articulacin evoluciona desde su posicin inicial a la final sin tener en
cuenta el estado o evolucin del resto de articulaciones.
Normalmente, cada actuador trata de llevar a su articulacin al punto de
destino en el menor tiempo posible ( a la mxima v ).
Para robots simples o con UC limitadas.
Movimiento eje a eje : Slo se mueve un eje cada vez. Cuando la 1
articulacin termine de moverse ( una vez que haya alcanzado su punto
final ) comienza la 2, y as sucesivamente.
Este tipo de movimiento da lugar a un elevado tiempo de ciclo ( tiempo
95
total invertido en el movimiento ), aunque con un bajo consumo de P
instantnea por parte de los actuadores.
Movimiento simultneo de ejes : Todos los actuadores comienzan
simultneamente a mover las articulaciones del robot a una v especfica
para cada una de ellas. Dado que la distancia a recorrer y las v sern en
general diferentes, cada una acabar su movimiento en un instante
diferente.
El movimiento del robot no acabar hasta que se alcance definitivamente el punto final, lo que
se producir cuando el eje que ms tarde concluya su movimiento. El tiempo total
invertido en el movimiento coincidir con el del eje que ms tiempo emplee
en realizar su movimiento particular, pudindose dar la circunstancia de que el resto
de actuadores hayan forzado su movimiento a una v y a elevadas, vindose obligados
finalmente a esperar a la articulacin ms lenta.
El tiempo de ciclo se reduce ( coincide con el eje que ms tarde en concluir
su movimiento ), aunque aumenta el consumo instantneo de P.
TRAYECTORIAS COORDINADAS ( ISCRONAS )
Todas las articulaciones comienzan a moverse a la vez.
Para evitar que algunos actuadores trabajen forzando sus v y a, teniendo que esperar despus la
conclusin del movimiento de la articulacin ms lenta, puede hacerse un clculo previo,
averiguando cul es la articulacin ms lenta y qu tiempo invertir. Se ralentizar el
movimiento del resto de ejes ms rpidos para que inviertan el mismo tiempo
en su movimiento, acabando todos ellos simultneamente. Todas las
articulaciones se coordinan comenzando y acabando su movimiento a la vez, adaptndose todas
a la ms lenta.
El tiempo de ciclo es el menor posible y coincide con el de la articulacin ms
lenta
No se exigen esfuerzos intiles ( v y a elevadas ) a los ejes ms rpidos; es decir,
no se piden a y v elevadas a los actuadores de manera intil.
Desde el punto de vista del usuario no importa la trayectoria que describe el
extremo del robot, siendo sta impredecible, aunque un conocimiento del modelo y control
cinemtico del robot permitir su clculo.
C
TRAYECTORIAS CONTINUAS
Cuando se pretende que la trayectoria ( en el espacio cartesiano ) que sigue el
extremo del robot sea conocida por el usuario, es preciso calcular de manera
continua las trayectorias articulares.
Tpicamente, las trayectorias que el usuario pretende que el robot describa, son trayectorias en lnea
recta o en arco de crculo. Para conseguirlo habr que seguir los pasos indicados en el apartado
5.6.1.2. El resultado ser que cada articulacin sigue un movimiento aparentemente
catico con posibles y continuos cambios de direccin y v, y sin coordinacin
con el resto de articulaciones.
96
Sin embargo, el resultado conjunto ser que el extremo del robot describir la trayectoria deseada.
Para robots con UC sofisticadas.
D
EJEMPLO DE TRAYECTORIAS ARTICULARES PARA UN ROBOT SCARA DE 2 GDL
( t, q i ) y
Se representan las trayectorias articulares q1 (t) y q 2 (t) en el espacio articular
el resultado final en el espacio de la tarea ( x, y ) para los 4 tipos de trayectorias :
Movimiento eje a eje
Movimiento simultneo de ejes
Trayectoria coordinada
Trayectoria continua rectilnea
5.6.1.5
MUESTREO DE TRAYECTORIAS CARTESIANAS
No es posible una transformacin analtica desde la trayectoria cartesiana a la
articular :[ j(t) q(t) ]
Solucin : Conversin ( usando el modelo cinemtico inverso) de algunos puntos
de j(t) Muestreo
La trayectoria cartesiana ms habitual es la lnea recta, y a veces trayectorias circulares. Ambas
pueden ser descritas de manera analtica en funcin del tiempo, de modo que es fcil conocer las
coordenadas cartesianas por las que se desea que pase el extremo del robot en un instante
concreto.
Puede parecer en principio que cuanto mayor sea el n instantes ( n puntos ) en los
que se muestrea la trayectoria cartesiana, se obtendrn mejores resultados, por
cuanto que la trayectoria final pasara por estos puntos ajustndose a lo especificado con mayor
precisin.
Sin embargo, debe considerarse que cada uno de estos puntos debe ser transformado a sus
correspondientes coordenadas articulares ( se necesita realizar la transformada
inversa para cada uno de ellos.) y ser despus utilizados en alguno de los interpoladores para
generar la trayectoria articular. El coste computacional, limitado por la necesaria respuesta en
tiempo real del sistema de control del robot, desaconseja que el n puntos cartesianos a tomar
crezca de manera indiscriminada.
Eleccin del n puntos a tomar para muestrear la trayectoria cartesiana :
1
Muchos puntos : Alta precisin pero se necesita realizar la transformada
inversa para cada uno de ellos. Mayor coste computacional
97
Pocos puntos : Baja precisin
La no linealidad en el modelo geomtrico del robot indica que, dependiendo de
su cinemtica y de la posicin instantnea en cuestin, el error cometido entre
la trayectoria resultante del extremo del robot y la trayectoria cartesiana
deseada puede variar mucho.
Es conveniente decidir no slo cuntos puntos se
seleccionan de la trayectoria cartesiana, sino tambin cules son, teniendo como objetivo llegar
a un compromiso entre el n puntos seleccionados y el error entre la trayectoria resultante y la
deseada. Criterios a seguir :
1
Seleccionar slo aquellos puntos de la trayectoria cartesiana
estrictamente necesarios, quedando stos ms prximos entre s all
donde se producira mayor error de la trayectoria, y ms espaciados en
los tramos en los que las trayectorias deseada y resultante sean ms
cercanas.
Seleccionar puntos equidistantes tan cercanos como sea posible,
asegurando que las trayectorias articulares puedan ser generadas antes
del tiempo en que sean requeridas por el control dinmico del robot.
5.6.1.6
Hay que alcanzar un compromiso :
Mediante algoritmos que evalan
cuntos puntos y dnde (Taylor)
INTERPOLACIN DE TRAYECTORIAS EN EL ESPACIO ARTICULAR
Una de las funciones del control cinemtico es : Unir una sucesin de puntos en el
espacio articular por los que se quiere que pasen las articulaciones del robot en
un instante determinado.
Junto con las condiciones de posicintiempo, es conveniente aadir restricciones en la v
y a de paso por los puntos, de manera que se asegure la suavidad de la
trayectoria y se limiten las v y a mximas.
Para ello se deber seleccionar algn tipo de funcin ( frecuentemente polinmica ) cuyos
coeficientes se ajustarn al imponer las condiciones de contorno : Posiciones ( q ), v ( q ) y a ( q )
En la seleccin de esta funcin debe considerarse que tanto el clculo de sus coeficientes, como su
posterior utilizacin para generar puntos de consigna para el control dinmico, debe hacerse
en tiempo real, por lo que la simplicidad de la funcin ser un factor a valorar.
Es decir : Utilizacin de funciones polinmicas, cuyos coeficientes se ajustan en
funcin de las restricciones previas, y teniendo en cuenta que deben utilizarse
en tiempo real.
98
Interpoladores ( funciones interpoladoras ) ms frecuentes :
Lineale
s
Cbicos
A
tramos
Otros
La funcin polinmica es una lnea
recta
La funcin polinmica es de grado 3
( splines )
Combinacin de diversos polinomios
Funciones sinusoidales,
Cada interpolador ha sido desarrollado para 1 solo GDL, por lo que el mismo clculo
deber repetirse para cada uno de los GDL del robot.
Aunque las tcnicas de interpolacin descritas a continuacin estn planteadas para el
espacio articular, son igualmente aplicables para el espacio de la tarea.
INTERPOLADORES LINEALES
Posicin ( q ), velocidad (
q )
El ms sencillo.
La unin entre sucesivos valores de una
coordenada articular es una lnea recta :
y aceleracin ( q )
t t i 1
q i 1 ( t i 1 t t i )
q(t) ( q i q i 1 )
T ( t i t i 1 )
Asegura continuidad en la posicin.
Origina saltos bruscos en la velocidad ( q ) de la
articulacin, y consecuentemente precisara de
aceleraciones ( q ) de valor , lo que en la prctica
no es posible.
INTERPOLADORES CBICOS
Para asegurar que la trayectoria que une los puntos por los que tiene que
pasar la articulacin considerada presente continuidad en v : Cada pareja de
i1 i
puntos adyacentes (q , q ) se une mediante un polinomio de grado 3 :
q ( t ) a b ( t t i 1 ) c ( t t i 1 ) 2 d ( t t i 1 )3 ( t i 1 t t i )
a q i 1
c ( 3 / T 2 ) ( q i q i 1 ) ( 2 / T 2 ) q i 1 ( 1 / T 2 ) q i
b q i 1
d ( 2 / T 3 ) ( q i q i 1 ) ( 1 / T 2 ) ( q i 1 q i )
T ( t i t i 1 )
99
( a, b, c, d ) permiten imponer 4 condiciones de contorno : 2 de posicin y 2 de v
i
Para calcular ( a, b, c, d ) es preciso conocer a priori las v de paso ( q ) por cada punto.
La trayectoria final est formada de una serie de polinomios cbicos
concatenados ( splines ), cada uno vlido entre 2 puntos consecutivos, elegidos
de forma que exista continuidad en posicin y v.
El uso de polinomios de grado 3 permite asegurar que el polinomio pasa por los 2 puntos y al
mismo tiempo permite imponer los valores de v de paso por los mismos.
Al contrario del interpolador de grado 1 (lineal), aqu, la v de las articulaciones durante el
recorrido de stas vara continuamente, lo que exige un control permanente de
la misma.
C
INTERPOLADORES A TRAMOS
C.1
INTERPOLADOR DE 3 TRAMOS
Descomposicin de la trayectoria que une 2 puntos
( q 0 , q1 ) en 3 tramos consecutivos.
Tramo central ( 2 ) : Se utiliza un interpolador lineal
La v se mantiene cte, no siendo preciso imprimir al
actuador ninguna a :
Velocidad ( v ) : ( q V ) Aceleracin ( a ) : ( q 0 )
Tramos inicial ( 1 ) y final ( 3 ) : Se utiliza un
polinomio de grado 2, de modo que la a toma
valores ctes 0 y la v :
Tramo 1 : Vara linealmente desde la v de la
trayectoria anterior a la de la presente.
Tramo 3 : Vara desde la v de la trayectoria
presente hasta la de la siguiente, con lo que se
asegura continuidad en la v.
GRFICA : Trayectoria con solo 2 puntos de vinicial y vfinal nulas :
q 0 0 q 1 0
q 0 s ( a / 2 ) t 2
V ( a )
q(t) q 0 s ( V 2 / 2 a ) ( s V ) t
t (T )
q q V
2
2
T s 1 0
q
(
aT
/
2
)
(
aT
t
)
(
a
/
2
)
t
]
(T
T
1
V a
( q
)
( q
)
( q q )
V : vmxima max permitida a : amxima max a utilizar
s : signo 1 0
C.2
INTERPOLADOR CON AJUSTE PARABLICO
100
En caso de tener una trayectoria formada por varios
puntos, la v de paso por los puntos intermedios no
debera ser 0, puesto que esto dara lugar a un
movimiento discontinuo del robot.
Esta situacin puede ser evitada si se permite que la trayectoria no
pase exactamente por los puntos. La trayectoria final
coincidira con las trayectorias rectilneas que unen
los puntos 2 a 2 salvo en las cercanas de los
mismos, donde un polinomio de grado 2 permitira
variar progresivamente la v, evitando as los valores de
la a que han sido descritos para los interpoladores lineales.
til cuando no se necesita mucha precisin en los
puntos de paso intermedios.
Esta tcnica se aproxima a la del interpolador lineal tanto ms cuanto mayor sea la q permitida,
coincidiendo con aqul en el caso de q =
0 1 2
Si se quiere pasar por ( q , q , q ) en t = 0, t T1 y t ( T1 T2 ) , respectivamente, la ecuacin de
los 3 tramos que componen la trayectoria que une 2 puntos consecutivos es :
q 0 [ ( q1 q 0 ) / T1 ] t
0 t ( T1 )
q1 q 0
( t T1 ) a ( t T1 ) 2 ( T1 ) t ( T1 )
q ( t ) q1
T1
2
1
2
1
( T1 ) t ( T1 T2 )
q [ ( q q ) / T2 ] ( t T1 )
T ( q 2 q1 ) T2 ( q1 q 0
a 1
2 T1 T2
q = cte = a que permite cambiar la q de un tramo al siguiente.
Cuanto mayor sea la q permitida, menor ser el tiempo de
transicin : Si q
Tiempo utilizado en variar la q del movimiento, estando repartido simtricamente respecto
al instante T1
1
Es fcil obtener el mximo error e cometido entre la trayectoria ideal ( pasando por q ) y la real
con el segmento parablico. Este se produce en t T1 y toma el valor :
2
1
1
0
a 2 T1 ( q q ) T2 ( q q
e
4 T1 T2
2
Este e disminuye al permitir tiempos de cambio de trayectoria ms pequeos, siendo 0 si no se
utilizase tramo parablico ( = 0 ) y la q pudiese tomar el valor
D
OTROS INTERPOLADORES
Diferentes tipos de interpoladores han sido propuestos y utilizados para conseguir unir los puntos de
la trayectoria con funciones continuas, derivables 2 veces y computacionalmente manejables.
Pueden utilizarse funciones sinusoidales, que aseguran continuidad en todas las derivadas.
Para unir 2 puntos consecutivos podra utilizarse : q (t) a ( b t ) c sen ( t )
101
Imponiendo las condiciones de contorno ( posicin, v y a ) se obtendran ( a, b, c )
5.6.2
CONTROL DINMICO
5.6.2.1
INTRODUCCIN
Recibe las consignas del planificador de trayectorias.
OBJETIVO : Conseguir que la trayectoria seguida por cada articulacin del robot
q (t )
q (t) ] por el planificador de
[ i ] sea lo ms aproximada a la especificada [ d
trayectorias.
SOLUCIN INICIAL : Utilizar los modelos dinmicos del robot ( LagrangeEuler,
NewtonEuler,...).
El control basado en modelos dinmicos del robot es complejo
coste computacional
Mucho
INCONVENIENTES DEL CONTROL DINMICO :
1
El modelo dinmico del
manipulador :
Complejo :
Fuertemente no lineal.
Sistema multivariable.
Modelo acoplado.
Parmetros variables en el tiempo ( posicin,
carga,).
( t ) D [ q( t ) ] q ( t ) h [ q( t ), q ( t ) ] c [ q( t ) ] Fv [ q ( t ) ]
F : Par debido al rozamiento viscoso.
Necesario aplicar teoras de control ms potentes y complejas.
Alto coste computacional.
Simplificaciones Prdida de calidad en las prestaciones.
ASPECTOS DEL CONTROL DINMICO :
1
SOLUCIN PRCTICA : Trabajar con un modelo para cada articulacin por
separado ( aprovechando el factor de reduccin para desacoplar las
articulaciones ) :
Control monoarticular
Reductoras : Si la articulacin presenta reductoras ( o engranajes ) se
reduce la v del movimiento y se disminuye el acoplamiento entre ejes.
q (t)
Con reductoras, la posicin de las articulaciones [ i ] est relacionada
102
q (t)
con la posicin del actuador [ a
]:
q a ( K q )
4
k 1
[ K : Matriz diagonal con los factores de reduccin ii
]
Consecuentemente se cumple
que :
q a ( K q )
q a ( K q )
a ( K 1 )
INFLUENCIA DEL FACTOR DE REDUCCIN
5.6.2.2
TIPOS DE CONTROLADORES DE TRAYECTORIAS
Control local
Servo lineal.
Control predictivo ( con prealimentacin de par ).
103
Control de estructura variable.
Control desacoplado no lineal.
Control en el
espacio
cartesiano
Control de movimiento resuelto ( v, a y F ).
Control
multiarticular
Control
Control
Control
Control
).
monoarticular
5.6.2.3
predictivo.
por planificacin de ganancias.
adaptativo por modelo de referencia.
adaptativo autosintonizado ( modelo autoregresivo
CONTROL MONOARTICULAR
Consideracin del control de cada articulacin de forma independiente.
No realista pero aceptable ( con prdida de prestaciones ).
La mayora de robots comerciales lo usan. Es ms aceptable en robots con alto factor de reduccin.
Esquemas de control ms extendidos :
Control
PD/PID
Control con pre
alimentacin
Control PD con compensacin de
gravedad
A ESQUEMA GENERAL DE CONTROL MONOARTICULAR
A.1 DIAGRAMA DE BLOQUES DE UNA ARTICULACIN
Modelo simplificado del actuador : El
accionamiento elctrico se supone
suficientemente rpido como para
aproximarlo por una ganancia cte :
( K u )
A.2
ESQUEMA GENERAL DE CONTROL
B CONTROL PREALIMENTADO POR INVERSIN DEL MODELO
Si el modelo de la articulacin fuera
perfecto, se podra disear por inversin
del modelo, un compensador ideal con
error de seguimiento nulo :
1
[ K F1 ( s ) q d ( s ) p ( s ) ]
1
( J s B ) s
q( s ) q ( s )
p ( s )
d
F1 ( s ) ( 1 / K ) ( J s B ) s
( J s B ) s
q ( s )
B.1
RESPUESTA A ENTRADA
0
q
q( s ) q d ( s )
Si la referencia d toma cualquier valor y la perturbacin es nula ( p
):
104
q (t)
La salida q(t) coincide exactamente con la entrada d
Error de seguimiento nulo.
Esto slo es cierto si :
Se conoce exactamente el modelo del motor y de la articulacin : (
Parmetros K, J, y B )
No hay perturbaciones
En la prctica :
El modelo nunca es perfecto.
Es necesario compensar el par perturbador para eliminar las desviaciones
q (t)
entre q(t) y d
B.2 RESPUESTA A PERTURBACIN
q 0 ) y la perturbacin tiene forma de escaln [ p ( 1 / s ) ] :
Si no hay cambio en la referencia ( d
1/ s
q( s )
2
( B / J ) t
salida ser :
( t / B ) ( J / B2 )
( J s B ) s La
q( t ) ( J / B ) e
p
q(t) evolucionar continuamente [ trmino ( t / B ) ] como consecuencia de la perturbacin
, a pesar que se pretenda que permanezca inmvil.
CONTROL REALIMENTADO
Se realimenta la diferencia entre la posicin de la coordenada generalizada deseada y la real :
1
[ K R( s ) q d ( s ) p ( s ) ]
q ( s )
( J s B ) s K R( s )
Control ms frecuente : PID
C.1
u ( t ) [ k p e( t ) ] k i [ e( t ) d( t ) ] [ k d ( d e( t ) / d( t ) ) ]
RESPUESTA A ENTRADA ESCALN
q ( 1 / s ) ] y la perturbacin es nula ( p 0 ) :
Si la referencia toma forma de escaln unitario [ d
1
K R(s)
q(s)
lim q( t ) q( ) lim [ s q( s ) ] 1
(
J
s
B
)
R(s)
s t
s 0
q
Respuesta de la articulacin ante d escaln con R(s) 0
En rgimen permanente la salida alcanza a la entrada.
C.2
RESPUESTA A PERTURBACIN
Si no hay cambio en la referencia ( q d 0 ) y la
(1 / s )
: q(s)
2
perturbaci
n
tiene
forma
de
escaln
[
(
1
/
s
)
]
J
s
B
s
R(s)
p
105
R(s) K p
q( ) Lim [ s q(s) ] [ 1 / ( K K p ) ]
Si R(s) es un P :
estacionario, la salida queda retrasada.
R(s) K p ( K i / s )
Si R(s) es un PI :
entrada en rgimen estacionario.
s 0
q( ) Lim [ s q(s) ] 0
s 0
En rgimen
La salida alcanza a la
C.
RESPUESTA A PERTURBACIN-ESCALN
3
Regulador P : La salida queda retrasada
Regulador PI : La salida alcanza a la entrada.
CONTROL ( PREALIMENTADO + REALIMENTADO )
1
p ( s )
( J s B ) s K R( s )
q ( s ) q d ( s )
q 0 ) y perturbacin en forma de escaln unitario [ p ( 1 / s ) ] :
Sin cambio en la referencia ( d
1/ s
q ( s )
( J s B ) s K R( s ) ( Coincide con el caso realimentado ).
Combina las ventajas de prealimentado y realimentado.
E CONTROL CON COMPENSACIN DE GRAVEDAD
La accin integral es necesaria para poder compensar el efecto de las perturbaciones, pero tiende a
empeorar la respuesta dinmica. Hay que considerar mtodos alternativos para tratar de anular
el error producido por las posibles perturbaciones, distintas del uso de la accin integral.
De los trminos que generan el par perturbador el ms importante suele ser el de la gravedad.
En rgimen permanente, la perturbacin ( p ) generada por las dems articulaciones slo
depende del trmino de gravedad [ matriz C(q) ], que se calcula con facilidad.
F
CONTROL [( PD + FF )+ G ]
106
1
[ p ( s ) C( q ) ]
q( s )
( J s B ) s K R( s )
No hay cambio en la referencia :
s [ C(q) p (s) ]
lim q(t) q() lim ( s q(s) ) lim
t
s 0
s 0 ( J s B ) s K R(s)
En rgimen permanente, p slo viene dado por los efectos de la gravedad q 0 ,
independientemente de que R(s) tenga o no accin integral.
G
CONCLUSIONES DEL CONTROL MONOARTICULAR
El uso de la accin integral es necesario para eliminar el error en rgimen permanente, pero
empeora la respuesta dinmica del actuador.
La prealimentacin puede utilizarse para eliminar el error de seguimiento.
El control PD con prealimentacin ( PD + FF ) y compensacin de gravedad ( G ) combina las
ventajas de un control prealimentado, evitando los efectos del par perturbador de las dems
articulaciones.
5.6.2.4
CONTROL MULTIARTICULAR
En ocasiones, la suposicin simplificadora del par p ( influencia del resto de las articulaciones
sobre el control de una articulacin ) no es vlida ( accionamientos sin reductoras, v
elevadas ).
Se debe entonces considerar al sistema como multivariable y acoplado.
Elevada complejidad.
Tcnicas ms extendidas :
1
Desacoplamiento por inversin del modelo/par calculado.
Tcnicas de control adaptativo :
Planificacin de ganancias.
Con modelo de referencia (
MRAC )
Par calculado adaptativo.
DESACOPLAMIENTO POR INVERSIN DEL MODELO
Como en el caso monoarticular, se utiliza la prealimentacin con el modelo inverso para cancelar la
dinmica ( y as desacoplarla ).
Modelo del robot
D(q) q H ( q, q ) C(q) ( Fv q ) e junto con la Cte de par ( K ) del motor
107
Se ha incluido en el modelo un rozamiento viscoso ( v ) y un par externo ( e )
1
Se desacopla prealimentando con : [ D( q ) q d Fv q d H ( q, q ) C( q ) ] K
A.1 EQUIVALENCIA CON EL FF EN MONOARTICULAR
CONTROL PRE-ALIMENTADO MONOARTICULAR ( J, B, C, K )
CONTROL MULTIARTICULAR ( D,
A.2
Fv , C, K, H )
EFECTO DEL DESACOPLAMIENTO POR INVERSIN DEL MODELO
Par de mando a la salida de los motores :
[ ( D( q ) s 2 ) ( Fv s ) ] K 1 q d ( H ( q, q ) C( q ) ) K 1 K
Modelo ( uso del par ) :
D( q ) q H ( q, q ) C( q ) ( Fv q ) e
Igualando ambas ecuaciones, la ley de control es :
[ ( D( q ) s ) Fv ] s
q q d
q ( t ) coinciden,
En ausencia de perturbacin externa ( e ), la trayectoria real q(t) y la deseada d
quedando el sistema desacoplado.
A.3
CONTROL PID SOBRE EL SISTEMA DESACOPLADO POR PREALIMENTACIN
108
La prealimentacin es insuficiente porque :
Las perturbaciones siempre estn presentes.
Hay variaciones en el modelo No se conocen con exactitud ( D,H, C, K,
Fv )
SOLUCIN : Utilizar un control PID, sobre el sistema desacoplado, para dar robustez al
control frente a las incertidumbres anteriores.
Al haber desacoplado el sistema, cada regulador PID ser monovariable :
0
k p1 ( k i1 / s ) ( k d 1 s )
0
k p 2 ( ki2 / s ) ( kd 2 s )
R(s)
0
0
k pm ( k i m
/ s ) ( k dm s )
ESQUEMA
Par de mando a la salida de los motores :
[ ( D( q ) s 2 ) ( Fv s ) ] q d [ H ( q, q ) C( q ) ] R( s ) K ( q d q )
2
Modelo ( uso del par ) : [ ( D(q) s ) ( Fv s ) ] q H ( q, q ) C(q) e
Igualando ambas ecuaciones, la ley de control es :
q qd
( D( q ) s 2 ) ( F s ) ( R( s ) K )
v
A.4
EFECTOS DE ( PID + FF ) EN CONTROL MULTIARTICULAR
2
1
Ley de control : q q d [ ( D( q ) s ) ( Fv s ) ( R( s ) K ) ] e
En ausencia de perturbacin :
( e 0 ) q( t ) q d ( t )
q
Ante perturbaciones en forma de escaln unitario en todas las articulaciones sin variar d :
e [ ( 1 / s ) ( 1 / s ) ]T
q (s ) 0
y d
lim q(t) q( ) lim ( s q(s) ) [ 0 0 ]T
En rgimen permanente : t
s 0
109
NOTA : Considerar que :
A.5
R ii1
( k s ) k ( k s2 )
p1
i1
d1
LEY DE CONTROL DE PAR CALCULADO
Caso general de control por par calculado :
u [ ( D( q ) s 2 ) ( Fv s ) ] q d H ( q, q ) C( q ) K 1 R( s ) e
( e 0 )
e [ ( 1 / s ) ( 1 / s ) ]T
q d ( s ) 0
Si :
B
q( t ) q d ( t )
q d ( ) 0
CONTROL ADAPTATIVO
El control ( PID + FF ) es eficiente si no hay perturbacin y se conoce perfectamente el modelo.
En general, los parmetros dinmicos no se conocen con precisin o cambian.
El control adaptativo permite adaptar el regular al cambio de los parmetros.
Alternativamente se puede ajustar el regulador a unas condiciones intermedias de funcionamiento y
asegurar que los movimientos del robot se mantienen estables en otras condiciones, aunque con su
calidad disminuida.
TIPOS :
1
Control por planificacin de ganancias.
Control adaptativo con modelo de referencia
( MRAC )
Control adaptativo autoajustable.
B.1
CONTROL POR PLANIFICACIN DE GANANCIAS
110
Discretizar las diferentes condiciones de funcionamiento, y para cada una de ellas, ajustar el
regulador ( PID, FF,... )
Una tabla almacena los parmetros PID y otros.
Las entradas a la tabla pueden ser los valores de las coordenadas articulares y la carga.
Los valores intermedios pueden ser interpolados.
LIMITACIONES DE LA PLANIFICACIN DE GANANCIAS
[ 6 GDL + Carga ( 7 parmetros ) ] Excesivo n situaciones una vez discretizado.
Para disminuir el n parmetros :
Los movimientos de los 3 GDL de orientacin suponen pequeas
variaciones en la dinmica No discretizar.
En ocasiones, el valor del primer GDL est en un plano a los dems. Su
posicin no afecta al comportamiento de los dems.
Hay que garantizar la estabilidad en el cambio de parmetros del regulador.
B.2
CONTROL ADAPTATIVO CON MODELO DE REFERENCIA MRAC
La diferencia instantnea entre el comportamiento real del
robot ( q ) y el modelo deseado ( q ) se utiliza para calcular
los parmetros del controlador utilizado.
Dificultad en encontrar el algoritmo de adaptacin que
asegure la estabilidad.
B.3
CONTROL POR PAR CALCULADO ADAPTATIVO
F
Identificacin en lnea de las matrices D, v , H, C y K.
Dificultades en garantizar la estabilidad y problemas por la limitacin del tiempo de clculo
necesario.
111
5.6.2.5
AJUSTE DE LOS PARMETROS DEL PID
CRITERIOS DE DISEO :
Mxima velocidad de respuesta sin sobreoscilacin ( crticamente
amortiguado )
Evitar excitaciones de frecuencia cercana a r n ( r / 2 )
R( s ) k p ( k i / s ) ( k d s )
p( s ) s 2 [ ( B k d ) / J ] s ( k p / J )
Slo accin PD :
R( s ) k p ( k d s )
Sistema de 2 orden con :
( B k d ) [ 2 ( k p J ) ] 1
Coeficiente de amortiguamiento :
( kp / J )
Frecuencia natural : n
( B k d ) [ 2 ( k p J ) ] 1 1
Sistema crticamente amortiguado ( = 1 )
n ( k p / J )
n ( r / 2 )
2 ( k p / J ) r
Prevencin de excitaciones cercanas a la resonancia :
5.6.2.6 ASPECTOS PRCTICOS DE LA IMPLEMENTACIN
Controladores discretos : Si bien el diseo suele plantearse en continuo, la
implementacin del sistema de control se realiza en un p, con lo que el
diseo continuo hay que convertirlo a discreto ( con posible presencia de ZOH
).
Saturacin de los actuadores ( Accin windup ) :
Los dispositivos electrnicos destinados a suministrar la P a los actuadores
del robot tienen un margen de actuacin limitado.
La presencia de errores mantenidos, junto con la accin integral, puede
saturar al controlador La seal de control es cte independientemente
del error Accin windup genera oscilaciones y se tarda ms tiempo en
estabilizarse.
Flexin y oscilaciones estructurales : Se coloca un filtro notch a la salida del
regulador que elimine de la seal de control las f cercanas a la fresonancia del
sistema.
5.6.2.7
SATURACIN DE AMPLIFICADORES. EFECTO DE LA ACCIN INTEGRAL
Respuesta sin y con saturacin
Par con y sin saturacin
112
SOLUCIONES A LA SATURACIN
1
PI con antiwindup : Corta la
accin integral cuando se satura la
salida del integrador.
Control IPD : Evita valores elevados en la entrada al amplificador.
q( s )
K ( k i / s )
q ( s ) ( J s B ) s K k p ( k i / s ) ( k p s )
FdT con mismos polos que PID : d
No incorporar la accin integral hasta que se est prximo al punto de destino
5.6.2.8
OSCILACIONES ESTRUCTURALES
Evitar excitar al sistema mecnico con cercanas a sus naturales
113
s 2 ( 2 n ) s 2n
s 2 ( s ) 2
n
n
G M (s)
S-ar putea să vă placă și
- Análisis y diseño de piezas con Catia V5De la EverandAnálisis y diseño de piezas con Catia V5Evaluare: 5 din 5 stele5/5 (1)
- Practica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionDocument19 paginiPractica #1: Escuela Superior Politecnica Del Litoral Facultad de Ingenieria en Electricidad Y ComputacionAlex Guamán EspinozaÎncă nu există evaluări
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDe la EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsÎncă nu există evaluări
- Fundamento de RoboticaDocument39 paginiFundamento de RoboticaISAAC OSUNA MARMOLEJOÎncă nu există evaluări
- UF1253 - Diagnóstico de deformaciones estructuralesDe la EverandUF1253 - Diagnóstico de deformaciones estructuralesÎncă nu există evaluări
- Unidad 1 Tarea 1Document14 paginiUnidad 1 Tarea 1cairoÎncă nu există evaluări
- Sistema de información para la operación remota de plantas de generación de energía hidroeléctricaDe la EverandSistema de información para la operación remota de plantas de generación de energía hidroeléctricaÎncă nu există evaluări
- Control de Sistemas Robotizados - Resumen Unidad 2Document24 paginiControl de Sistemas Robotizados - Resumen Unidad 2BesayÎncă nu există evaluări
- Medición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónDe la EverandMedición de longitudes: Libro de consulta acerca de los procedimientos de medición en fabricaciónEvaluare: 4 din 5 stele4/5 (1)
- Tema 01b Morfología Del Robot ManipuladorDocument21 paginiTema 01b Morfología Del Robot Manipuladordalton yañezÎncă nu există evaluări
- 100 circuitos de shields para arduino (español)De la Everand100 circuitos de shields para arduino (español)Evaluare: 3.5 din 5 stele3.5/5 (3)
- Robotica Industrial 2 2014Document49 paginiRobotica Industrial 2 2014Braulio ValdesÎncă nu există evaluări
- Comprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109De la EverandComprobación y optimización del programa cnc para el mecanizado por arranque de viruta. FMEH0109Încă nu există evaluări
- Fundamentos de RoboticaDocument17 paginiFundamentos de Roboticatareas_p276115Încă nu există evaluări
- Introduccion RoboticaDocument106 paginiIntroduccion RoboticaArturo Tapia100% (1)
- Clase #2a Morfología de Robot - Estructura MecánicaDocument46 paginiClase #2a Morfología de Robot - Estructura MecánicaJuanÎncă nu există evaluări
- 1 Introducción A La Robótica PDFDocument33 pagini1 Introducción A La Robótica PDFIsrael Carrillo SanchezÎncă nu există evaluări
- Morfologia Del Robot PDFDocument10 paginiMorfologia Del Robot PDFphillamxÎncă nu există evaluări
- Unidad 5 RoboticaDocument16 paginiUnidad 5 RoboticaLuis CastilloÎncă nu există evaluări
- Estructura de Un Robot IndustrialDocument20 paginiEstructura de Un Robot IndustrialPerla Rodríguez PÎncă nu există evaluări
- Elementos Terminales o Actuadores FinalesDocument6 paginiElementos Terminales o Actuadores FinalesCrizz AngelÎncă nu există evaluări
- Clasificacion, ComponentesDocument76 paginiClasificacion, ComponentesCarlosLPÎncă nu există evaluări
- Cuadroo Sinoptico RoboticaDocument1 paginăCuadroo Sinoptico Roboticaleinad152414Încă nu există evaluări
- COSIMIRDocument28 paginiCOSIMIRJoseph0% (1)
- Efectores y PrecisionDocument29 paginiEfectores y PrecisionEli D'KidÎncă nu există evaluări
- Proyecto Con CimDocument17 paginiProyecto Con CimCarlos Alejandro Galvez ChicchonÎncă nu există evaluări
- Presentacion RoboticaDocument27 paginiPresentacion RoboticaJezzi GLÎncă nu există evaluări
- Preguntas Guia de RoboticaDocument5 paginiPreguntas Guia de RoboticaDaniel Osis0% (1)
- Presentacion Control de Brazo RobóticoDocument38 paginiPresentacion Control de Brazo RobóticoLeonardo AmayaÎncă nu există evaluări
- Sensores y Actuadores de Los RobotsDocument6 paginiSensores y Actuadores de Los RobotsObed Antonio SandovalÎncă nu există evaluări
- Morfología Del RobotDocument61 paginiMorfología Del RobotJUAN ANTONIO MARQUEZ CORNEJOÎncă nu există evaluări
- Pia Arq RobotsDocument27 paginiPia Arq RobotsAlex MartinezÎncă nu există evaluări
- Estructura de Un Robot IndustrialDocument22 paginiEstructura de Un Robot IndustrialMiroslava GalvánÎncă nu există evaluări
- Motores DC Y BRAZODocument38 paginiMotores DC Y BRAZOOmar Milton Condori PeñaÎncă nu există evaluări
- Robotica IndustrialDocument138 paginiRobotica IndustrialJeans Marco Nassi CernaÎncă nu există evaluări
- Movimientos y Articulaciones de Los Robots IndustrialesDocument12 paginiMovimientos y Articulaciones de Los Robots IndustrialesJuan Diego Orozco GamboaÎncă nu există evaluări
- Configuraciones de Un Robot Industrial3 PDFDocument30 paginiConfiguraciones de Un Robot Industrial3 PDFAgustin Basilio SalinasÎncă nu există evaluări
- Control Numerico ExpoDocument19 paginiControl Numerico ExpoJorge ZozayaÎncă nu există evaluări
- Sensores ActuadoresDocument27 paginiSensores ActuadoresYsabel AliagaÎncă nu există evaluări
- Arquitectura de Robots, Sensores y ActuadoresDocument27 paginiArquitectura de Robots, Sensores y ActuadoresHector RosasÎncă nu există evaluări
- CuestonarioDocument4 paginiCuestonarioSofía S. ZambranoÎncă nu există evaluări
- Fase 2 Trabajo ColaborativoDocument28 paginiFase 2 Trabajo Colaborativocesar sanchezÎncă nu există evaluări
- Robot Manipulador IndustrialDocument6 paginiRobot Manipulador IndustrialJosé AntonioÎncă nu există evaluări
- Cinematica Directa de Un Robot KukaDocument19 paginiCinematica Directa de Un Robot Kukavelazquez4marquez4anÎncă nu există evaluări
- Cl1 Cinematica de MecanismosDocument33 paginiCl1 Cinematica de MecanismosManuel Urbina CarrascoÎncă nu există evaluări
- Tecnologia de La RoboticaDocument17 paginiTecnologia de La RoboticaIng. Víctor GarzaÎncă nu există evaluări
- 2 RoboticaIndustrial MorfologiaDocument54 pagini2 RoboticaIndustrial MorfologiaJorgeÎncă nu există evaluări
- 1.a Fundamentos y Consideraciones Básicas de La RobóticaDocument16 pagini1.a Fundamentos y Consideraciones Básicas de La Robóticajavier antonioÎncă nu există evaluări
- CUESTIONARIO FINAL TCyR 1851-SBBDocument16 paginiCUESTIONARIO FINAL TCyR 1851-SBBBrandon SalazarÎncă nu există evaluări
- Dere Utn-Frt U2 Clase 6Document20 paginiDere Utn-Frt U2 Clase 6Angel G. GomezÎncă nu există evaluări
- 02 MorfologiaDocument35 pagini02 MorfologiaFrancisco VitiÎncă nu există evaluări
- Articulo Brazo RoboticoDocument9 paginiArticulo Brazo RoboticoSergio SalasÎncă nu există evaluări
- Concepto de RoboticaDocument26 paginiConcepto de Roboticabomaye10% (1)
- Sensores InternosDocument6 paginiSensores InternosJohn Bravo SánchezÎncă nu există evaluări
- Sensores InternosDocument5 paginiSensores InternosDuvan CardenasÎncă nu există evaluări
- DeR C3 M1 Clase 4Document30 paginiDeR C3 M1 Clase 4silvanaÎncă nu există evaluări
- Subsistemas de ControlDocument5 paginiSubsistemas de ControleloyzeaÎncă nu există evaluări
- RobotsDocument21 paginiRobotsMcPaul Dot100% (1)
- 30 Wilson VillegasDocument20 pagini30 Wilson Villegaspicoto100% (3)
- 2 Componentes de Un Robot IndustrialDocument26 pagini2 Componentes de Un Robot IndustrialJorge L. Aguilar Martínez100% (1)
- Curso de Introducción A C++ para Programadores en CDocument51 paginiCurso de Introducción A C++ para Programadores en Cinfobits100% (1)
- JAVA 2-Curso de Programacion - (Javier Ceballos)Document706 paginiJAVA 2-Curso de Programacion - (Javier Ceballos)rubiohotÎncă nu există evaluări
- ETSETB - Introducción A La Programación en CDocument153 paginiETSETB - Introducción A La Programación en CHector TorresÎncă nu există evaluări
- ARQUITECTURA JAVA SÓLIDA (Cecilio Álvarez Caules) PDFDocument404 paginiARQUITECTURA JAVA SÓLIDA (Cecilio Álvarez Caules) PDFrubiohotÎncă nu există evaluări
- Programación Orientada A Objetos Con C++Document31 paginiProgramación Orientada A Objetos Con C++api-3775614100% (7)
- Manual Práctico de Java 2Document81 paginiManual Práctico de Java 2Armando MancillaÎncă nu există evaluări
- C# Guia Total Del ProgramadorDocument404 paginiC# Guia Total Del Programadorleovelaz5100% (1)
- Manual Borland C++ Builder Con SQL (Espa - Ol)Document795 paginiManual Borland C++ Builder Con SQL (Espa - Ol)Uriel Alexander LoriaÎncă nu există evaluări
- Aprendiendo Desde 0 C++Document92 paginiAprendiendo Desde 0 C++eljaijaiÎncă nu există evaluări
- CDocument48 paginiCBertin VargasÎncă nu există evaluări
- Curso de C++Document195 paginiCurso de C++Ricardo RosÎncă nu există evaluări
- Manual de Armado y Reparacion de PC PDFDocument320 paginiManual de Armado y Reparacion de PC PDFMauricio GonzalezÎncă nu există evaluări
- Programacion en C y C++ (Manual FV)Document131 paginiProgramacion en C y C++ (Manual FV)Josua Obando100% (3)
- El C++ Por La Práctica, Introducción Al Lenguaje y Su FilosofíaDocument154 paginiEl C++ Por La Práctica, Introducción Al Lenguaje y Su Filosofíaapi-3775614Încă nu există evaluări
- Cómo Montar Un PC Paso A PasoDocument37 paginiCómo Montar Un PC Paso A Pasovertice100% (16)
- USERs Tecnico Redes y SeguridadDocument28 paginiUSERs Tecnico Redes y SeguridadFrqnclsco LinquiÎncă nu există evaluări
- Practica C#Document7 paginiPractica C#gelres1Încă nu există evaluări
- Solución A Problemas de Hardware PDFDocument61 paginiSolución A Problemas de Hardware PDFrubiohotÎncă nu există evaluări
- Tecnico en Redes y Seguridad - USERSDocument615 paginiTecnico en Redes y Seguridad - USERSᘹᕼᖆᓮᔙᖶᓍᖰᕼᕮᖆ ᕾᓌᖇᖶᓍ100% (3)
- 2 PDFDocument28 pagini2 PDFbizzy31Încă nu există evaluări
- Memorias (Flash y Ddr2)Document15 paginiMemorias (Flash y Ddr2)rubiohotÎncă nu există evaluări
- Guia de Motherboards 2008 (Spanish)Document12 paginiGuia de Motherboards 2008 (Spanish)MC. Rene Solis R.100% (6)
- Memoria RAM ExplicacionDocument113 paginiMemoria RAM ExplicacionadasdÎncă nu există evaluări
- 3-Dispositivos de Red PDFDocument28 pagini3-Dispositivos de Red PDFrubiohotÎncă nu există evaluări
- PC World Práctico (Tomos 1 2 3)Document455 paginiPC World Práctico (Tomos 1 2 3)rubiohot100% (1)
- Manual de Reparacion Peugeot 307Document253 paginiManual de Reparacion Peugeot 307Cristian Quintana Villar88% (16)
- Manual de Usuario Peugeot 307 PDFDocument208 paginiManual de Usuario Peugeot 307 PDFoscarÎncă nu există evaluări
- MKi9200-GUÍA RÁPIDADocument22 paginiMKi9200-GUÍA RÁPIDArubiohotÎncă nu există evaluări
- 2007 Peugeot 307Document210 pagini2007 Peugeot 307rubiohotÎncă nu există evaluări
- 2002 Peugeot 307 65662Document128 pagini2002 Peugeot 307 65662Alexis Duran AlbertoÎncă nu există evaluări
- Evaluación Grupal OPTIMIZACIÓNDocument4 paginiEvaluación Grupal OPTIMIZACIÓNDaniela LeandroÎncă nu există evaluări
- Proyecto Final de FundamentosDocument23 paginiProyecto Final de FundamentosKerlyn ChávezÎncă nu există evaluări
- Intoxicación Con PropanoDocument2 paginiIntoxicación Con PropanoDavid EduardoÎncă nu există evaluări
- Ensayo Libre Importancia de Las Matematicas en AdministracionDocument2 paginiEnsayo Libre Importancia de Las Matematicas en Administracionroberth mujicaÎncă nu există evaluări
- Anexos Al Registro de Inventario PermanenteDocument13 paginiAnexos Al Registro de Inventario PermanenteAnghiel Estefania C CÎncă nu există evaluări
- Linea Del TiempobromatologiaDocument2 paginiLinea Del TiempobromatologiaALONDRA YAZMIN AVALOS HERNANDEZÎncă nu există evaluări
- Autoevaluacion de WriterDocument5 paginiAutoevaluacion de WriterNorma Torralba0% (1)
- Pa 6Document7 paginiPa 6Dom DiegoÎncă nu există evaluări
- Afrobolivianos Imagen de Los Afrobolivianos PDFDocument71 paginiAfrobolivianos Imagen de Los Afrobolivianos PDFOrlando Llanos100% (1)
- Objetivos: Parte 1Document24 paginiObjetivos: Parte 1LuisÎncă nu există evaluări
- Batalla Del NiloDocument4 paginiBatalla Del NiloMarco AntonioÎncă nu există evaluări
- MA368 201801 Ficha S3Document5 paginiMA368 201801 Ficha S3Stefany De la cruz100% (1)
- Finca Ganadera A 35 MinutosDocument3 paginiFinca Ganadera A 35 MinutosHectorÎncă nu există evaluări
- Apuntes FP2 2021Document107 paginiApuntes FP2 2021pepitaaaÎncă nu există evaluări
- Informe 10 LRMDocument11 paginiInforme 10 LRMEdison David CastroÎncă nu există evaluări
- ORACIÓN DE VÍSPERAS Ante El SantísimoDocument61 paginiORACIÓN DE VÍSPERAS Ante El Santísimo1985Víctor100% (4)
- F7a-2537534ok Parque Los AnillosDocument3 paginiF7a-2537534ok Parque Los AnillosMiguel Antonio Porras ValdiviaÎncă nu există evaluări
- Jerarquización de Las NormasDocument3 paginiJerarquización de Las NormasMarleny Marín Ocampo100% (1)
- Tipos de EducaciónDocument18 paginiTipos de EducaciónFaridesc QuinteroÎncă nu există evaluări
- La Sulamita y SalomónDocument2 paginiLa Sulamita y SalomónIsaac NajleÎncă nu există evaluări
- La Ciudad Dual. Espacio de Libertades RestringidasDocument12 paginiLa Ciudad Dual. Espacio de Libertades RestringidasDaniel Garcia BrannerÎncă nu există evaluări
- Losacor D 100: Losartán / HidroclorotiazidaDocument2 paginiLosacor D 100: Losartán / HidroclorotiazidaFranco Jerez BazánÎncă nu există evaluări
- Como Descubrir A Los Satanistas Infiltrados en Las Iglesias EvangelicasDocument4 paginiComo Descubrir A Los Satanistas Infiltrados en Las Iglesias EvangelicasAndres AlzamoraÎncă nu există evaluări
- Guía Mii 2s2021Document43 paginiGuía Mii 2s2021MartinValenciaCrispinÎncă nu există evaluări
- Mi IkigaiDocument3 paginiMi Ikigaiinventario0% (1)
- Presentacion FinalDocument42 paginiPresentacion FinalLucas Palacios PedescollÎncă nu există evaluări
- Sunat - Menú SolDocument2 paginiSunat - Menú SolRuth MLÎncă nu există evaluări
- De Anima de AristotelesDocument14 paginiDe Anima de AristotelesLuis TejadaÎncă nu există evaluări
- Montaje Postre EvolucionDocument16 paginiMontaje Postre Evolucionzuleymalozada55Încă nu există evaluări
- Especificaciones Tecnicas de Centro Civico Queda PDF IDocument55 paginiEspecificaciones Tecnicas de Centro Civico Queda PDF IGuillermo VilcaÎncă nu există evaluări