S-ar putea să vă placă și
- Answer Key To World English 3 Workbook Reading and Crossword Puzzle ExercisesDocument3 paginiAnswer Key To World English 3 Workbook Reading and Crossword Puzzle Exercisesjuanma2014375% (12)
- Nonlinear Optimization of Vehicle Safety Structures: Modeling of Structures Subjected to Large DeformationsDe la EverandNonlinear Optimization of Vehicle Safety Structures: Modeling of Structures Subjected to Large DeformationsEvaluare: 5 din 5 stele5/5 (1)
- GO KART Design Report PDFDocument13 paginiGO KART Design Report PDFPrashant Tiwari86% (69)
- Vehicle Collision Dynamics: Analysis and ReconstructionDe la EverandVehicle Collision Dynamics: Analysis and ReconstructionÎncă nu există evaluări
- Preliminary Design ReportDocument8 paginiPreliminary Design ReportAman MaanÎncă nu există evaluări
- Design and Fabrication of Race Spec Go-KartDocument6 paginiDesign and Fabrication of Race Spec Go-KartAJER JOURNALÎncă nu există evaluări
- Simulation of ATV Roll Cage TestingDocument5 paginiSimulation of ATV Roll Cage TestingIOSRjournalÎncă nu există evaluări
- Team Screwdriver'S: Dhole Patil Collage of Engineering PuneDocument38 paginiTeam Screwdriver'S: Dhole Patil Collage of Engineering PuneAniket SankpalÎncă nu există evaluări
- Design Report Eco Kart Team Exergy.Document19 paginiDesign Report Eco Kart Team Exergy.Upender Rawat50% (2)
- Finite Element Analysis of Automobile ChassisDocument4 paginiFinite Element Analysis of Automobile ChassisGRD JournalsÎncă nu există evaluări
- Sae Technical 2008-36-0253 Paper Series: Design and Optimization of A Space Frame ChassisDocument11 paginiSae Technical 2008-36-0253 Paper Series: Design and Optimization of A Space Frame ChassisCharlie TejÎncă nu există evaluări
- R04706112117 PDFDocument6 paginiR04706112117 PDFSantiago UrgilesÎncă nu există evaluări
- Design and Optimization of Hub and Knuckle For Formula SAE CarDocument5 paginiDesign and Optimization of Hub and Knuckle For Formula SAE CarTalles OliveiraÎncă nu există evaluări
- Modeling and Development of Active Bumper System To Reduce Shocks For A Vehicle by Using FEADocument9 paginiModeling and Development of Active Bumper System To Reduce Shocks For A Vehicle by Using FEAElakkiya DasanÎncă nu există evaluări
- Ijerm Review Paper 02Document6 paginiIjerm Review Paper 02Sagar GalgatÎncă nu există evaluări
- Fatigue Analysis and Optimization of Upright of A FSAE VehicleDocument6 paginiFatigue Analysis and Optimization of Upright of A FSAE Vehiclepreetham saiÎncă nu există evaluări
- Chassis: - : Element Weight %Document4 paginiChassis: - : Element Weight %AnkitchaurasiyaÎncă nu există evaluări
- P 00500Document13 paginiP 00500khiladi2Încă nu există evaluări
- CAE Report 20180577Document12 paginiCAE Report 20180577Kamlesh SharmaÎncă nu există evaluări
- Double WishboneDocument6 paginiDouble WishboneRian SteveÎncă nu există evaluări
- Numerical Estimation of The Torsional Stiffness CHDocument14 paginiNumerical Estimation of The Torsional Stiffness CHKiran ShetÎncă nu există evaluări
- Drive by Wire Go KartDocument66 paginiDrive by Wire Go KartBien Morfe100% (1)
- Design, Analysis and Optimisation of ATV Spaceframe ChassisDocument14 paginiDesign, Analysis and Optimisation of ATV Spaceframe ChassisKoushal SinghÎncă nu există evaluări
- Design and Analysis of Steering Knuckle Component For Terrain VehicleDocument7 paginiDesign and Analysis of Steering Knuckle Component For Terrain Vehicleapurva kumar singhÎncă nu există evaluări
- 81 14 DesignDocument9 pagini81 14 DesignRaniero FalzonÎncă nu există evaluări
- Experimental and Finite Element Stress Analysis of Three Wheeler Front FenderDocument7 paginiExperimental and Finite Element Stress Analysis of Three Wheeler Front FenderNithin SunnyÎncă nu există evaluări
- Amortisseur Ressort EtudeDocument11 paginiAmortisseur Ressort EtudeSliim AmiriÎncă nu există evaluări
- Project Report On ATV Prototype BAJA SAE INDIADocument60 paginiProject Report On ATV Prototype BAJA SAE INDIAsanket50% (6)
- Structural Analysis of Double-Wishbone Suspension SystemDocument7 paginiStructural Analysis of Double-Wishbone Suspension SystemIJRASETPublicationsÎncă nu există evaluări
- Design, Modeling and Failure Analysis of Car Front Suspension Lower ArmDocument15 paginiDesign, Modeling and Failure Analysis of Car Front Suspension Lower ArmMikael Bezerra Cotias Dos SantosÎncă nu există evaluări
- I JR Et 20150404003 JJJDocument9 paginiI JR Et 20150404003 JJJSuresh YadavÎncă nu există evaluări
- 272 Concept Class Mansoura University DR Rev 2Document8 pagini272 Concept Class Mansoura University DR Rev 2Gazzara WorldÎncă nu există evaluări
- Comparative Analysis of Frontal Car Bumper During ImpactDocument5 paginiComparative Analysis of Frontal Car Bumper During ImpactInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Simulation and Static Analysis of An Off-Road Vehicle Roll CageDocument8 paginiSimulation and Static Analysis of An Off-Road Vehicle Roll CageIJMERÎncă nu există evaluări
- Design and FEA Simulation of Vehicle Suspension SyDocument10 paginiDesign and FEA Simulation of Vehicle Suspension Sysachinsahani734Încă nu există evaluări
- Design and Development of Car Suspension Lower Arm: December 2015Document8 paginiDesign and Development of Car Suspension Lower Arm: December 2015Sami Onur VuralÎncă nu există evaluări
- Steering AllTerrainVehicle PDFDocument8 paginiSteering AllTerrainVehicle PDFBikram GCÎncă nu există evaluări
- Optimization of Car Rim Using OptiStructDocument6 paginiOptimization of Car Rim Using OptiStructsujaydsouza1987Încă nu există evaluări
- Ijmer 44054147 PDFDocument7 paginiIjmer 44054147 PDFarif septaÎncă nu există evaluări
- Design and Fabrication of A Student Competition Based Racing CarDocument6 paginiDesign and Fabrication of A Student Competition Based Racing CarpachieduÎncă nu există evaluări
- Front Bumper PDFDocument6 paginiFront Bumper PDFsayedÎncă nu există evaluări
- RNL-A-07 Rollover Analysis of Bus Body Structure VolvoDocument7 paginiRNL-A-07 Rollover Analysis of Bus Body Structure VolvoAlejandro ZamoraÎncă nu există evaluări
- Car Frontal ImpactDocument25 paginiCar Frontal Impactapi-3762972100% (1)
- Design and Analysis of A Tubular Space Frame Chassis of A High Performance Race CarDocument5 paginiDesign and Analysis of A Tubular Space Frame Chassis of A High Performance Race CaresatjournalsÎncă nu există evaluări
- Design and Analysis of An All Terrain Vehicle: Gaurav S. Chimote, Kartik P. Rajas, Alok Kumar MishraDocument5 paginiDesign and Analysis of An All Terrain Vehicle: Gaurav S. Chimote, Kartik P. Rajas, Alok Kumar MishraupadhyaysanuÎncă nu există evaluări
- Iajicte 2022 8 1 12Document11 paginiIajicte 2022 8 1 12uday chavanÎncă nu există evaluări
- Bumper Design Enhancement Through Crash AnalysisDocument9 paginiBumper Design Enhancement Through Crash AnalysisSanthosh KumarÎncă nu există evaluări
- Study of Front-Body of Formula-One Car For Aerodynamics Using CFDDocument7 paginiStudy of Front-Body of Formula-One Car For Aerodynamics Using CFDInternational Journal of Application or Innovation in Engineering & ManagementÎncă nu există evaluări
- Analysis of Double Wishbone Suspension System ComponentsDocument26 paginiAnalysis of Double Wishbone Suspension System ComponentsDeepto BanerjeeÎncă nu există evaluări
- Baja Design ReportDocument17 paginiBaja Design ReportsarthakashÎncă nu există evaluări
- Thermal and Structural Analysis of Vented and Normal Disc Brake RotorsDocument9 paginiThermal and Structural Analysis of Vented and Normal Disc Brake RotorsTechnos_IncÎncă nu există evaluări
- Impact Analysis of Mini BajaDocument6 paginiImpact Analysis of Mini Bajayashvirsingh21Încă nu există evaluări
- Analyzing Car Suspension System Using Finite Element AnalysisDocument32 paginiAnalyzing Car Suspension System Using Finite Element AnalysisEdd SamiÎncă nu există evaluări
- Structural Analysis of Ladder Chassis Frame For Jeep Using AnsysDocument7 paginiStructural Analysis of Ladder Chassis Frame For Jeep Using AnsysIJMERÎncă nu există evaluări
- Optimization of Car BumperDocument10 paginiOptimization of Car Bumpervinay kumarÎncă nu există evaluări
- Optimization & Modal Analysis of Engine Mounting Bracket For Different Materials by Using Finite Element AnalysisDocument6 paginiOptimization & Modal Analysis of Engine Mounting Bracket For Different Materials by Using Finite Element AnalysishadiÎncă nu există evaluări
- M Jayakumar Paper (17142691331)Document12 paginiM Jayakumar Paper (17142691331)N V DhandapaniÎncă nu există evaluări
- Carwin42: Evolution of Artificial Intelligence Controller and Aeromechanical Setup in Simulated Race CarsDocument11 paginiCarwin42: Evolution of Artificial Intelligence Controller and Aeromechanical Setup in Simulated Race CarsAntonio RodriguesÎncă nu există evaluări
- Design and Analysis of Braking System For FSAE: ResearchDocument6 paginiDesign and Analysis of Braking System For FSAE: ResearchamoghÎncă nu există evaluări
- Designing Efficient Commuter Vehicle Using Finite Element Analysis and Computational Fluid DynamicsDocument6 paginiDesigning Efficient Commuter Vehicle Using Finite Element Analysis and Computational Fluid DynamicsSyed Anas SohailÎncă nu există evaluări
- Lesson: The Averys Have Been Living in New York Since The Late NinetiesDocument1 paginăLesson: The Averys Have Been Living in New York Since The Late NinetiesLinea SKDÎncă nu există evaluări
- Invoices For UEG IstanbulDocument7 paginiInvoices For UEG IstanbulIesaw IesawÎncă nu există evaluări
- A Review of Stories Untold in Modular Distance Learning: A PhenomenologyDocument8 paginiA Review of Stories Untold in Modular Distance Learning: A PhenomenologyPsychology and Education: A Multidisciplinary JournalÎncă nu există evaluări
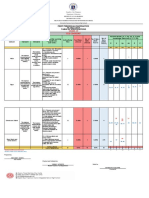
- Revised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10Document6 paginiRevised Final Quarter 1 Tos-Rbt-Sy-2022-2023 Tle-Cookery 10May Ann GuintoÎncă nu există evaluări
- Laboratorio 1Document6 paginiLaboratorio 1Marlon DiazÎncă nu există evaluări
- How To Present A Paper at An Academic Conference: Steve WallaceDocument122 paginiHow To Present A Paper at An Academic Conference: Steve WallaceJessicaAF2009gmtÎncă nu există evaluări
- III.A.1. University of Hawaii at Manoa Cancer Center Report and Business PlanDocument35 paginiIII.A.1. University of Hawaii at Manoa Cancer Center Report and Business Planurindo mars29Încă nu există evaluări
- Centrifuge ThickeningDocument8 paginiCentrifuge ThickeningenviroashÎncă nu există evaluări
- Onset Hobo Trade T Cdi 5200 5400 User ManualDocument3 paginiOnset Hobo Trade T Cdi 5200 5400 User Manualpaull20020% (1)
- Ac1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTDocument50 paginiAc1025 Exc16 (1) .PDFTTTTTTTTTTTTTTTTTTTHung Faat ChengÎncă nu există evaluări
- Assignment 3Document2 paginiAssignment 3Debopam RayÎncă nu există evaluări
- Acampamento 2010Document47 paginiAcampamento 2010Salete MendezÎncă nu există evaluări
- Freshers Jobs 26 Aug 2022Document15 paginiFreshers Jobs 26 Aug 2022Manoj DhageÎncă nu există evaluări
- Research On Export Trade in BangladeshDocument7 paginiResearch On Export Trade in BangladeshFarjana AnwarÎncă nu există evaluări
- Electric Motor Cycle and ScooterDocument9 paginiElectric Motor Cycle and ScooterA A.DevanandhÎncă nu există evaluări
- IFR CalculationDocument15 paginiIFR CalculationSachin5586Încă nu există evaluări
- Buildingawinningsalesforce WP DdiDocument14 paginiBuildingawinningsalesforce WP DdiMawaheb ContractingÎncă nu există evaluări
- OVDT Vs CRT - GeneralDocument24 paginiOVDT Vs CRT - Generaljaiqc100% (1)
- List of The Legend of Korra Episodes - Wikipedia PDFDocument27 paginiList of The Legend of Korra Episodes - Wikipedia PDFEmmanuel NocheÎncă nu există evaluări
- Conveyor Control Using Programmable Logic ControllerDocument7 paginiConveyor Control Using Programmable Logic ControllerWann RexroÎncă nu există evaluări
- WinCC Control CenterDocument300 paginiWinCC Control Centerwww.otomasyonegitimi.comÎncă nu există evaluări
- Flying ColorsDocument100 paginiFlying ColorsAgnieszkaAgayo20% (5)
- Schneider Contactors DatasheetDocument130 paginiSchneider Contactors DatasheetVishal JainÎncă nu există evaluări
- HAYAT - CLINIC BrandbookDocument32 paginiHAYAT - CLINIC BrandbookBlankPointÎncă nu există evaluări
- Homework 1Document8 paginiHomework 1Yooncheul JeungÎncă nu există evaluări
- Bachelors - Harvest Moon Animal ParadeDocument12 paginiBachelors - Harvest Moon Animal ParaderikaÎncă nu există evaluări
- ARC-232, Material Construction 2Document4 paginiARC-232, Material Construction 2danishali1090Încă nu există evaluări
- Land of PakistanDocument23 paginiLand of PakistanAbdul Samad ShaikhÎncă nu există evaluări
- Health and Safety For The Meat Industry: Guidance NotesDocument198 paginiHealth and Safety For The Meat Industry: Guidance NotesPredrag AndjelkovicÎncă nu există evaluări