S-ar putea să vă placă și
- Speech Generating Device: Fundamentals and ApplicationsDe la EverandSpeech Generating Device: Fundamentals and ApplicationsÎncă nu există evaluări
- Face Detection and Recognition on Mobile DevicesDe la EverandFace Detection and Recognition on Mobile DevicesEvaluare: 1 din 5 stele1/5 (1)
- B4 MainDocument78 paginiB4 MainMohammad RaheemÎncă nu există evaluări
- ANJALI R - Remote Access of Home Appliances Using Humanoid RobotDocument13 paginiANJALI R - Remote Access of Home Appliances Using Humanoid Robot6005 ANJALI RÎncă nu există evaluări
- Report Tele PresenceDocument6 paginiReport Tele PresencePrasad RaoÎncă nu există evaluări
- Telepresence - Arun T RaviDocument7 paginiTelepresence - Arun T RaviAnnonymous963258Încă nu există evaluări
- Web and Speech Controlled Video Surviellance RobotDocument8 paginiWeb and Speech Controlled Video Surviellance RobotIJRASETPublicationsÎncă nu există evaluări
- A Study On Gesture Control Ardiuno RobotDocument8 paginiA Study On Gesture Control Ardiuno RobotElakkiya DasanÎncă nu există evaluări
- Final Year Cpvasssssssssssp PROJECTDocument46 paginiFinal Year Cpvasssssssssssp PROJECTDhiraj Chaudhari 137 CoÎncă nu există evaluări
- Gesture Recognition and Voice Control On DevicesDocument8 paginiGesture Recognition and Voice Control On DevicesCharith R RameshÎncă nu există evaluări
- AbhishekDocument13 paginiAbhishekAbhishek ChettyÎncă nu există evaluări
- 123456Document11 pagini123456Abhishek ChettyÎncă nu există evaluări
- Synopsis On Mobile TrackingDocument11 paginiSynopsis On Mobile Trackingcooolhoney885Încă nu există evaluări
- Arduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringDocument8 paginiArduino Based Voice Controlled Robot Vehicle: IOP Conference Series: Materials Science and EngineeringAbhishekÎncă nu există evaluări
- Design and Implementation of Spy RobotDocument12 paginiDesign and Implementation of Spy Robotshunmathi100% (2)
- (IJCST-V11I2P3) :mr. A. Sriram, BV.N. Tanmayee Gayatri, G. Ashritha, C. Supriya ReddyDocument4 pagini(IJCST-V11I2P3) :mr. A. Sriram, BV.N. Tanmayee Gayatri, G. Ashritha, C. Supriya ReddyEighthSenseGroupÎncă nu există evaluări
- Koustuv Institute of Self Domain: Wearable ComputersDocument22 paginiKoustuv Institute of Self Domain: Wearable ComputersSwati NandÎncă nu există evaluări
- Mini Project Abstracts - EmbeddedDocument24 paginiMini Project Abstracts - EmbeddedS Manivannan 16BIT0437Încă nu există evaluări
- Presented By: Kirti AroraDocument21 paginiPresented By: Kirti AroraKirti AroraÎncă nu există evaluări
- TCS 802 - NotesDocument253 paginiTCS 802 - NotesYash SharmaÎncă nu există evaluări
- .Voice Controlled CarDocument3 pagini.Voice Controlled CarMuhazam Khan Sherbaz KhanÎncă nu există evaluări
- Mobile Computing TutorialDocument5 paginiMobile Computing TutorialMotivator SinghÎncă nu există evaluări
- Development of A Mobile Robot As A Test Bed For Tele-PresentationDocument9 paginiDevelopment of A Mobile Robot As A Test Bed For Tele-PresentationMonica TangÎncă nu există evaluări
- Hyundai Wearable Robotics For Walking Assistance Offer A Full Spectrum of MobilityDocument11 paginiHyundai Wearable Robotics For Walking Assistance Offer A Full Spectrum of MobilityNelson TacyÎncă nu există evaluări
- Insync: DescriptionDocument4 paginiInsync: DescriptionCepeda Steven Wayne MiguelÎncă nu există evaluări
- Mobile ComputingDocument17 paginiMobile ComputingtemsÎncă nu există evaluări
- Mobile ComputingDocument12 paginiMobile Computingromesh1998100% (1)
- Singh 2018Document9 paginiSingh 2018roboticsengineer.anttÎncă nu există evaluări
- Synopsis Robot Phone SystemDocument12 paginiSynopsis Robot Phone SystemPuran Singh ChannaÎncă nu există evaluări
- FYP Ideas 2015Document3 paginiFYP Ideas 2015Sami KhanÎncă nu există evaluări
- Integration of Home Assistance With A Gesture Controlled Robotic ArmDocument5 paginiIntegration of Home Assistance With A Gesture Controlled Robotic ArmTajbia HossainÎncă nu există evaluări
- MULTIROBOTDocument23 paginiMULTIROBOTsujithmuprojectsÎncă nu există evaluări
- Software Requirements Specification: Project Title: Self Adaptive Event Generation in MobilesDocument11 paginiSoftware Requirements Specification: Project Title: Self Adaptive Event Generation in Mobilesusmangani87Încă nu există evaluări
- Telerobotics: Telerobotics Is The Area of Robotics Concerned WithDocument4 paginiTelerobotics: Telerobotics Is The Area of Robotics Concerned WithTristan Joel CheamÎncă nu există evaluări
- Robot Movement Control by Using AndriodDocument62 paginiRobot Movement Control by Using AndriodLikhitha NinarapuÎncă nu există evaluări
- A Smart Tactile For Visually Impaired People: Keywords: 1Document4 paginiA Smart Tactile For Visually Impaired People: Keywords: 1ArmandoÎncă nu există evaluări
- Report 2Document48 paginiReport 2Sushmitha R. S - 111Încă nu există evaluări
- Ui Automation System FOR Physically Disabled: Team MembersDocument21 paginiUi Automation System FOR Physically Disabled: Team MembersShalini KumaranÎncă nu există evaluări
- Catchy Name B-MailDocument10 paginiCatchy Name B-MailVipin YadavÎncă nu există evaluări
- Human-Robot Interaction in Service RoboticsDocument9 paginiHuman-Robot Interaction in Service RoboticsRinkuRoyÎncă nu există evaluări
- Task No. 1: Make A Research On How An Indirect Process Technology Operates. Provide A Clear Flow/ Function For Every StepDocument10 paginiTask No. 1: Make A Research On How An Indirect Process Technology Operates. Provide A Clear Flow/ Function For Every StepKimberly VargasÎncă nu există evaluări
- Cell Phones The Primary Personal Mobile Computing DevicesDocument4 paginiCell Phones The Primary Personal Mobile Computing Devicessurendiran123Încă nu există evaluări
- Black BookDocument86 paginiBlack BookPradeep RajputÎncă nu există evaluări
- Gesture Based Robot FinalDocument40 paginiGesture Based Robot Finalbhavesh jangidÎncă nu există evaluări
- Devices That Are Linked TogetherDocument3 paginiDevices That Are Linked TogetherRoy Jhones Balingkit AbsinÎncă nu există evaluări
- TelepresenceDocument31 paginiTelepresenceArshi AgarwalÎncă nu există evaluări
- Final New ProjectDocument33 paginiFinal New ProjectAnil MaliÎncă nu există evaluări
- Exploration and Implementation of A Next Generation Telepresence SystemDocument6 paginiExploration and Implementation of A Next Generation Telepresence SystemvissusamuraiÎncă nu există evaluări
- Mobile Applications Development Unit - 1Document25 paginiMobile Applications Development Unit - 1Arpit Gaur100% (1)
- mhb1 RaporDocument6 paginimhb1 RapormhbalamanÎncă nu există evaluări
- Description: Palm Vein TechnologycDocument3 paginiDescription: Palm Vein TechnologycAnitha KrishnakumarÎncă nu există evaluări
- MCA Second Year Mobile Computing MCAC403Document125 paginiMCA Second Year Mobile Computing MCAC403RutvikÎncă nu există evaluări
- Robotics Project ProposalDocument7 paginiRobotics Project Proposalgustavstierlin40Încă nu există evaluări
- Hand Gesture RecognitionDocument5 paginiHand Gesture RecognitionKartik WadehraÎncă nu există evaluări
- Hand Gesture Controlled RobotDocument59 paginiHand Gesture Controlled RobotNext Gen DigitalÎncă nu există evaluări
- BSSE-3A HCI Assignment 03Document6 paginiBSSE-3A HCI Assignment 03lalaÎncă nu există evaluări
- IOT AssignmentDocument22 paginiIOT AssignmentDarsh ShahÎncă nu există evaluări
- Voice Control Armed Robot Assistant Using Arduino UnoDocument4 paginiVoice Control Armed Robot Assistant Using Arduino UnoInternational Journal of Innovative Science and Research TechnologyÎncă nu există evaluări
- WCMC Chapter 2 - Mobile Computing - ConciseDocument20 paginiWCMC Chapter 2 - Mobile Computing - ConciseMehari TemesgenÎncă nu există evaluări
- Lazar Angelov'S: Fitness FactsDocument15 paginiLazar Angelov'S: Fitness FactsOriel Boldrini Valdivia100% (1)
- Lecture 1 Principles of Six Lecture 1: Principles of Six Sigma SGMDocument48 paginiLecture 1 Principles of Six Lecture 1: Principles of Six Sigma SGMprakulmittal2Încă nu există evaluări
- Lazar Angelov'S: Fitness FactsDocument15 paginiLazar Angelov'S: Fitness FactsOriel Boldrini Valdivia100% (1)
- TolerancesDocument27 paginiTolerancesSavio FernandesÎncă nu există evaluări
- Catia Tolerances PDFDocument17 paginiCatia Tolerances PDFprakulmittal2Încă nu există evaluări
- Lazar Angelov'S: Fitness FactsDocument15 paginiLazar Angelov'S: Fitness FactsOriel Boldrini Valdivia100% (1)
- AA Standards and Tolerances For Aluminum Extrusions PDFDocument48 paginiAA Standards and Tolerances For Aluminum Extrusions PDFShibnathLahiri100% (1)
- Introduction To French PDFDocument36 paginiIntroduction To French PDFWhateverÎncă nu există evaluări
- GDT Symbols Reference Guide2Document2 paginiGDT Symbols Reference Guide2prakulmittal2Încă nu există evaluări
- AA Standards and Tolerances For Aluminum Extrusions PDFDocument48 paginiAA Standards and Tolerances For Aluminum Extrusions PDFShibnathLahiri100% (1)
- Catia V5 DraftingDocument46 paginiCatia V5 DraftingarchanalavishÎncă nu există evaluări
- CATIA V5 DraftingDocument44 paginiCATIA V5 DraftinghappyarryÎncă nu există evaluări
- AA Standards and Tolerances For Aluminum Extrusions PDFDocument48 paginiAA Standards and Tolerances For Aluminum Extrusions PDFShibnathLahiri100% (1)
- Important Standards PDFDocument17 paginiImportant Standards PDFprakulmittal2Încă nu există evaluări
- CATIA V5 DraftingDocument44 paginiCATIA V5 DraftinghappyarryÎncă nu există evaluări
- EcwDocument2 paginiEcwprakulmittal2Încă nu există evaluări
- Introduction To French PDFDocument36 paginiIntroduction To French PDFWhateverÎncă nu există evaluări
- Braking Distance: Maths Delivers!Document22 paginiBraking Distance: Maths Delivers!ZasaliveÎncă nu există evaluări
- Wwe Investor PresentationDocument43 paginiWwe Investor Presentationprakulmittal2Încă nu există evaluări
- Tele RoboticsDocument14 paginiTele Roboticsprakulmittal2Încă nu există evaluări
- Braking Distance: Maths Delivers!Document22 paginiBraking Distance: Maths Delivers!ZasaliveÎncă nu există evaluări
- Braking Distance: Maths Delivers!Document22 paginiBraking Distance: Maths Delivers!ZasaliveÎncă nu există evaluări
- Essential Features of Telepresence RobotsDocument6 paginiEssential Features of Telepresence Robotsprakulmittal2Încă nu există evaluări
- Flutter AnalysisDocument18 paginiFlutter Analysisprakulmittal2Încă nu există evaluări
- V2N3 5 Final As Printed 23rdjune14Document13 paginiV2N3 5 Final As Printed 23rdjune14prakulmittal2Încă nu există evaluări
- ANSYS AeroMechanics Update SSPDocument40 paginiANSYS AeroMechanics Update SSPprakulmittal2Încă nu există evaluări
- Nasa Rotor67Document12 paginiNasa Rotor67prakulmittal2Încă nu există evaluări
- Brazil 2014ugm Identify Modal Parameters For Flexible Composite WingDocument31 paginiBrazil 2014ugm Identify Modal Parameters For Flexible Composite Wingprakulmittal2Încă nu există evaluări
- Testing and Commissioning Procedure For Earthing System Method StatementDocument2 paginiTesting and Commissioning Procedure For Earthing System Method StatementHumaid ShaikhÎncă nu există evaluări
- Windows 8.1 Installation RealDocument99 paginiWindows 8.1 Installation Realsonimania96Încă nu există evaluări
- Karapatan NG MamimiliDocument6 paginiKarapatan NG MamimiliTheresa RayneraÎncă nu există evaluări
- Chady Gabra Paper Modified 2Document8 paginiChady Gabra Paper Modified 2Amri YusronÎncă nu există evaluări
- Lecture Thirteen System Security AuditDocument12 paginiLecture Thirteen System Security AuditianÎncă nu există evaluări
- SAP Configuration TR Transportation DocumentDocument6 paginiSAP Configuration TR Transportation DocumentMahesh GadhariÎncă nu există evaluări
- Quiz1 SolutionsDocument7 paginiQuiz1 SolutionsPrasad BobbyÎncă nu există evaluări
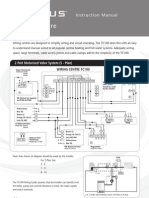
- CH Wiring DiagramDocument2 paginiCH Wiring DiagramflyingpeteÎncă nu există evaluări
- Republic of The Philippines Nueva Vizcaya State University Bambang, Nueva VizcayaDocument11 paginiRepublic of The Philippines Nueva Vizcaya State University Bambang, Nueva VizcayaHonora Fe DolorÎncă nu există evaluări
- SoC SyllabusDocument2 paginiSoC SyllabuslokeshÎncă nu există evaluări
- AV Tech Mdr759hDocument3 paginiAV Tech Mdr759hdc54006Încă nu există evaluări
- At Commands Interface Guide For at X41bDocument461 paginiAt Commands Interface Guide For at X41bEuuE2008Încă nu există evaluări
- Bh-0.66 I TransformadoresDocument4 paginiBh-0.66 I TransformadoresChint BoliviaÎncă nu există evaluări
- ch-11 - Math FunctionsDocument16 paginich-11 - Math FunctionsSwati MadheÎncă nu există evaluări
- MPSA13 Data SheetDocument5 paginiMPSA13 Data SheetbananameepÎncă nu există evaluări
- Agoda Vs AirbnbDocument7 paginiAgoda Vs AirbnbMohd Farhan Syazwan DzulkarnainÎncă nu există evaluări
- Role Based Home Pages R14.2Document148 paginiRole Based Home Pages R14.2CHARLES TUMWESIGYEÎncă nu există evaluări
- Product Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)Document3 paginiProduct Comparison: HP Laserjet Enterprise M605Dn (E6B70A) HP Laserjet Enterprise M806Dn Printer (Cz244A)ANDRES VILLAÎncă nu există evaluări
- Boot Your 3DEXPERIENCE 2015x Cloud-for-Academia-Guide V3-2 - 0Document60 paginiBoot Your 3DEXPERIENCE 2015x Cloud-for-Academia-Guide V3-2 - 0arabindaxyz5967Încă nu există evaluări
- 978 3 642 24106 2Document696 pagini978 3 642 24106 2Purvi JainÎncă nu există evaluări
- Proposed Business State: ID RequirementsDocument4 paginiProposed Business State: ID RequirementsCOMACO DATAÎncă nu există evaluări
- Sample Project PlanDocument4 paginiSample Project PlanWallace YeungÎncă nu există evaluări
- Chapter 1 - Introdution To AIDocument45 paginiChapter 1 - Introdution To AImuhammedÎncă nu există evaluări
- SHD Series Field Butt Fusion Welding Machine Technical Parameters PDFDocument19 paginiSHD Series Field Butt Fusion Welding Machine Technical Parameters PDFJavier Moya PiñonesÎncă nu există evaluări
- VFX Careers Guide 2014Document21 paginiVFX Careers Guide 2014gfxtoolscz100% (2)
- 01) MTU Hybrid Solution - Marine For Distributor - 01062017Document32 pagini01) MTU Hybrid Solution - Marine For Distributor - 01062017priyoÎncă nu există evaluări
- EMS DieselDocument57 paginiEMS DieselKha TrầnÎncă nu există evaluări
- Entrepreneurship Week 1 Quarter 4Document4 paginiEntrepreneurship Week 1 Quarter 4Arlyn Ragudos BSA1Încă nu există evaluări
- 01 Master SOP FinDocument6 pagini01 Master SOP FinPramod Athiyarathu100% (1)
- Electric Vehicle Traction Control - A New Mtte MethodologyDocument9 paginiElectric Vehicle Traction Control - A New Mtte MethodologyplnegraoÎncă nu există evaluări