S-ar putea să vă placă și
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Self Oscillating Class-D Audio Amplifier Circuit DesignDocument29 paginiSelf Oscillating Class-D Audio Amplifier Circuit DesignnicchioÎncă nu există evaluări
- Assembling AC DCPower SupplyDocument51 paginiAssembling AC DCPower SupplyDexter Rogero GumapoÎncă nu există evaluări
- UC3842 Inside SchematicsDocument17 paginiUC3842 Inside Schematicsp.c100% (1)
- Fr-d700 Instruction Manual (Applied)Document308 paginiFr-d700 Instruction Manual (Applied)Thủy TrAnÎncă nu există evaluări
- UC3845 Technical ExplanationDocument15 paginiUC3845 Technical ExplanationankurmalviyaÎncă nu există evaluări
- Uc3842 Provides Low-Cost Current-Mode Control: Application NoteDocument16 paginiUc3842 Provides Low-Cost Current-Mode Control: Application NoteLeonardo Ortiz100% (1)
- Design and Construction of Single Phase Pure Sine Wave Inverter For Photo Voltaic ApplicationDocument4 paginiDesign and Construction of Single Phase Pure Sine Wave Inverter For Photo Voltaic ApplicationRafid Haider ShantonuÎncă nu există evaluări
- An Introduction to Switched Mode Power Supply TopologiesDocument21 paginiAn Introduction to Switched Mode Power Supply Topologiesseahate100% (1)
- Neurophone CompleteDocument9 paginiNeurophone CompleteSimon Benjamin100% (3)
- A Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InverterDocument10 paginiA Very High Frequency DC-DC Converter Based On A Class Pfi Resonant InvertererdemsecenÎncă nu există evaluări
- Capacitor ESR MeterDocument7 paginiCapacitor ESR MeterrubemllÎncă nu există evaluări
- TO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemDocument11 paginiTO Eliminate Common Mode Leakage Current IN Photovoltaic Grid Connected Power SystemLava KumarÎncă nu există evaluări
- كتاب السر المظروف في علم بسط الحروفDocument30 paginiكتاب السر المظروف في علم بسط الحروفmdkadry83% (65)
- Aplicacion Uc3842Document15 paginiAplicacion Uc3842Gian Mejia100% (1)
- VSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownDocument38 paginiVSC-Based HVDC Link: To Allow Further Modifications To The Original System. This Model ShownleslyÎncă nu există evaluări
- Yang-Circuit Systems With MATLAB and PSpice-2007Document538 paginiYang-Circuit Systems With MATLAB and PSpice-2007nelsonÎncă nu există evaluări
- Hamza Al-Ali-FinalDocument22 paginiHamza Al-Ali-FinalHamza Mazen100% (1)
- Voltage To Frequency Converter Folosind Ci 555 TimerDocument11 paginiVoltage To Frequency Converter Folosind Ci 555 TimerAl ZanoagaÎncă nu există evaluări
- Analysis and Simulation of Single Phase Inverter Controlled by Neural NetworkDocument14 paginiAnalysis and Simulation of Single Phase Inverter Controlled by Neural NetworknandhakumarmeÎncă nu există evaluări
- Very Wide Input Voltage Range-Flyback (90V To 600V AC)Document12 paginiVery Wide Input Voltage Range-Flyback (90V To 600V AC)senkum812002Încă nu există evaluări
- 3-Phase PFC KolarDocument7 pagini3-Phase PFC KolarJayant SalianÎncă nu există evaluări
- Modeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorDocument6 paginiModeling and Simulation of Frequency Converter Used in Speed Control of Asynchronous MotorLelosPinelos123Încă nu există evaluări
- Low Power Operational Amplifier DesignDocument31 paginiLow Power Operational Amplifier DesignHarish KumarÎncă nu există evaluări
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Document17 paginiSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiÎncă nu există evaluări
- 60W Flyback TIDocument16 pagini60W Flyback TIe_magazin3821Încă nu există evaluări
- 128122-Accelerometer & VelomitorTransducerOperationDocument22 pagini128122-Accelerometer & VelomitorTransducerOperationNorman MoralesÎncă nu există evaluări
- Three phase induction motor using single phase supplyDocument8 paginiThree phase induction motor using single phase supplyhezugÎncă nu există evaluări
- Tidu 174Document16 paginiTidu 174AmyÎncă nu există evaluări
- PWM Strategies For Inverters With Fluctuating DC Link Input: ServedDocument18 paginiPWM Strategies For Inverters With Fluctuating DC Link Input: ServeddaisysheelaÎncă nu există evaluări
- 20 The Essence of ThreePhase INTELEC2011Document28 pagini20 The Essence of ThreePhase INTELEC2011noreuÎncă nu există evaluări
- Cycloconverter UpdateDocument6 paginiCycloconverter Updatesoulfusion85Încă nu există evaluări
- 01413552Document8 pagini01413552Nalin Lochan GuptaÎncă nu există evaluări
- Precision Constant Current Source For Electrical Impedance TomographyDocument4 paginiPrecision Constant Current Source For Electrical Impedance Tomographyjorgeluis.unknownman667Încă nu există evaluări
- IEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeDocument4 paginiIEEE POWER ELECTRONICS 2015 Matlab Projectlist Mtech BeKumar RajÎncă nu există evaluări
- Design and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorDocument5 paginiDesign and Simulation of PFC Circuit For AC/DC Converter Based On PWM Boost RegulatorSEP-PublisherÎncă nu există evaluări
- Applications of Balanced ModulatorDocument5 paginiApplications of Balanced ModulatorSomeshwar GaddalaÎncă nu există evaluări
- High Voltage Power Supply for Electro-Optics ApplicationsDocument5 paginiHigh Voltage Power Supply for Electro-Optics ApplicationsmishithÎncă nu există evaluări
- A Novel Approach For A Sinusoidal Output Inverter: Irfan AlanDocument6 paginiA Novel Approach For A Sinusoidal Output Inverter: Irfan AlanKari Romero GuizasolaÎncă nu există evaluări
- Ieee Current ModeDocument7 paginiIeee Current ModepqqpÎncă nu există evaluări
- IEEE Power System Paper-A 20-KW, 10-KHz, Single-Phase Multilevel ActiveDocument7 paginiIEEE Power System Paper-A 20-KW, 10-KHz, Single-Phase Multilevel ActiveAnoop MathewÎncă nu există evaluări
- Elimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryDocument5 paginiElimination of Harmonics Using Active Power Filter Based On DQ Reference Frame TheoryseventhsensegroupÎncă nu există evaluări
- Mac Int J.Power ElectronicsDocument14 paginiMac Int J.Power Electronicssandeepbabu28Încă nu există evaluări
- PV Inverter System Structure and Control DesignDocument38 paginiPV Inverter System Structure and Control DesignAnggoro Indarto AkbarÎncă nu există evaluări
- Sine Wave GeneratorDocument12 paginiSine Wave GeneratorSorina LupuÎncă nu există evaluări
- Naresh DC Re Injection FinalDocument6 paginiNaresh DC Re Injection FinalRamu ThommandruÎncă nu există evaluări
- A Bidirectional, Sinusoidal, High-Frequency Inverter Design: AbstractDocument7 paginiA Bidirectional, Sinusoidal, High-Frequency Inverter Design: AbstractJoe CkhoÎncă nu există evaluări
- Digital Current Limiting Techniques For Switching Power Supplies PDFDocument9 paginiDigital Current Limiting Techniques For Switching Power Supplies PDFAdolfo A HerreraÎncă nu există evaluări
- Control Strategy For Three Phase PWM Rectifier Using SVM ModulationDocument7 paginiControl Strategy For Three Phase PWM Rectifier Using SVM Modulationeditor_ijtelÎncă nu există evaluări
- EEEN40197 Lecture Notes AJF PDFDocument46 paginiEEEN40197 Lecture Notes AJF PDFAnonymous gVhwdk9ui9Încă nu există evaluări
- An 1162Document36 paginiAn 1162naniknanikÎncă nu există evaluări
- A Complete Narrow-Band Power Line Communication Node For AMRDocument6 paginiA Complete Narrow-Band Power Line Communication Node For AMRSudheer KakaniÎncă nu există evaluări
- Pulse Oximetry CircuitDocument19 paginiPulse Oximetry Circuitنواف الجهنيÎncă nu există evaluări
- L4981Document23 paginiL4981Robert GabrielÎncă nu există evaluări
- DC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierDocument11 paginiDC Ripple Current Reduction On A Single-Phase PWM Voltage-Source RectifierRajni YadavÎncă nu există evaluări
- Dual Current-Sense Amplifi Ers Simplify H-Bridge Load MonitoringDocument2 paginiDual Current-Sense Amplifi Ers Simplify H-Bridge Load MonitoringJorge GuerreroÎncă nu există evaluări
- 500w Power Amplifier Circuit DiagramDocument6 pagini500w Power Amplifier Circuit DiagramJoão Alberto0% (1)
- A 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersDocument4 paginiA 0.55 V 7-Bit 160 MSs Interpolated Pipeline ADC Using Dynamic AmplifiersThanos van RamÎncă nu există evaluări
- Bmen3120 Project1 Frequency Selective Circuit 1Document12 paginiBmen3120 Project1 Frequency Selective Circuit 1api-3139933760% (2)
- KK Hpe (PPT) 1Document20 paginiKK Hpe (PPT) 1अभिषेक कुमार उपाध्याय100% (1)
- Low Power High Speed I/O Interfaces in 0.18um CmosDocument4 paginiLow Power High Speed I/O Interfaces in 0.18um Cmosayou_smartÎncă nu există evaluări
- U-93 Application NOTE A New Integrated Circuit For Current Mode ControlDocument9 paginiU-93 Application NOTE A New Integrated Circuit For Current Mode ControlpramodÎncă nu există evaluări
- AppNote03 Uc3842Document14 paginiAppNote03 Uc3842Heriberto Flores AmpieÎncă nu există evaluări
- Slua 143Document15 paginiSlua 143Tonia KataÎncă nu există evaluări
- Steady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableDocument5 paginiSteady State Analysis On HVLF-AC Transmission For Offshore Wind Power by Modern XLPE Submarine CableIJIRAE- International Journal of Innovative Research in Advanced EngineeringÎncă nu există evaluări
- TIP140, TIP141, TIP142, (NPN) TIP145, TIP146, TIP147, (PNP) Darlington Complementary Silicon Power TransistorsDocument8 paginiTIP140, TIP141, TIP142, (NPN) TIP145, TIP146, TIP147, (PNP) Darlington Complementary Silicon Power TransistorsroozbehxoxÎncă nu există evaluări
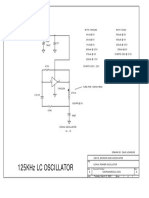
- 125k OscilaterDocument1 pagină125k OscilatermdkadryÎncă nu există evaluări
- LA4628Document9 paginiLA4628jgpbÎncă nu există evaluări
- Self-Oscillating Half-Bridge Driver: Ir2153 (D) (S) & (PBF)Document9 paginiSelf-Oscillating Half-Bridge Driver: Ir2153 (D) (S) & (PBF)Zoltán HalászÎncă nu există evaluări
- Cafene SolventDocument26 paginiCafene SolventmdkadryÎncă nu există evaluări
- Overature Series AN1192Document29 paginiOverature Series AN1192mdkadryÎncă nu există evaluări
- Applications of Op-Amp Circuits: Section 8.2Document8 paginiApplications of Op-Amp Circuits: Section 8.2mdkadryÎncă nu există evaluări
- Latitude-E5420 User's Guide Ar-AeDocument96 paginiLatitude-E5420 User's Guide Ar-AemdkadryÎncă nu există evaluări
- Sloa 133Document4 paginiSloa 133mdkadryÎncă nu există evaluări
- 6 Band Equalizer With One Ic LM741Document4 pagini6 Band Equalizer With One Ic LM741mdkadryÎncă nu există evaluări
- Complementary Transistors Pairs ListingDocument15 paginiComplementary Transistors Pairs ListingAndrea OrtegaÎncă nu există evaluări
- BB5 Natural Label3Document1 paginăBB5 Natural Label3mdkadryÎncă nu există evaluări
- CopigmenDocument87 paginiCopigmenwaterwind666Încă nu există evaluări
- Oxidation of Ethane To Ethylene To AceticDocument31 paginiOxidation of Ethane To Ethylene To AceticmdkadryÎncă nu există evaluări
- Fipronol WikiDocument6 paginiFipronol WikimdkadryÎncă nu există evaluări
- GMX On Irrigation (Sprinklers) : Site: Infosys Technologies MahendracityDocument11 paginiGMX On Irrigation (Sprinklers) : Site: Infosys Technologies MahendracitymdkadryÎncă nu există evaluări
- Loane Potato - Medium Maturity Variety from FranceDocument2 paginiLoane Potato - Medium Maturity Variety from FrancemdkadryÎncă nu există evaluări
- Benzal Thin GrapesDocument8 paginiBenzal Thin GrapesmdkadryÎncă nu există evaluări
- استخلاص الشيحDocument2 paginiاستخلاص الشيحmdkadryÎncă nu există evaluări
- تجمع المواد الصلبةDocument6 paginiتجمع المواد الصلبةmdkadryÎncă nu există evaluări
- Magnetics-Treatment of Fluids and WaterDocument45 paginiMagnetics-Treatment of Fluids and WatermdkadryÎncă nu există evaluări
- ES PROD Active ProductsDocument775 paginiES PROD Active ProductsmdkadryÎncă nu există evaluări
- Composition of GrapesDocument5 paginiComposition of GrapespeepgunÎncă nu există evaluări
- Alcohol Reactions and Oxidation StatesDocument37 paginiAlcohol Reactions and Oxidation Statesfsalgado7Încă nu există evaluări
- GCC Standardization Organization (Gso)Document13 paginiGCC Standardization Organization (Gso)mdkadryÎncă nu există evaluări
- Food Safety Issues Associated With Products From AquacultureDocument68 paginiFood Safety Issues Associated With Products From AquaculturemdkadryÎncă nu există evaluări
- Bacterial Control of Postharvesr DiseasesDocument7 paginiBacterial Control of Postharvesr DiseasesmdkadryÎncă nu există evaluări
- Biocontrol of Citrus Postharvest DiseasesDocument5 paginiBiocontrol of Citrus Postharvest DiseasesmdkadryÎncă nu există evaluări
- Design and Implementation of An Experimental Segway Model: March 2009Document6 paginiDesign and Implementation of An Experimental Segway Model: March 2009SKLÎncă nu există evaluări
- Simulink Collate 290321Document109 paginiSimulink Collate 290321TiniÎncă nu există evaluări
- Aic Lab ManualDocument50 paginiAic Lab ManualVishwanath PetliÎncă nu există evaluări
- 3g3JX InverterDocument262 pagini3g3JX InverterdatdttvuÎncă nu există evaluări
- ACS724 DatasheetDocument27 paginiACS724 DatasheetScott RadÎncă nu există evaluări
- Tinkercad Review For Teachers - Common Sense Education: Passive Filter Low PassDocument1 paginăTinkercad Review For Teachers - Common Sense Education: Passive Filter Low PassAlejandroÎncă nu există evaluări
- TeddyPardo PDFDocument3 paginiTeddyPardo PDFSyste DesigÎncă nu există evaluări
- SQUELCH CircuitDocument5 paginiSQUELCH CircuitZaw Khaing WinÎncă nu există evaluări
- ElectronicsDocument9 paginiElectronicsEstephen EdaÎncă nu există evaluări
- Tda 7340GDocument27 paginiTda 7340GAndrei PetriciÎncă nu există evaluări
- Biosensors 11 00198Document13 paginiBiosensors 11 00198Ramesh kÎncă nu există evaluări
- D Class Audio Amp by TIDocument74 paginiD Class Audio Amp by TIAnonymous DjWqKpZ1Încă nu există evaluări
- Ap3105na BCDDocument9 paginiAp3105na BCDlcd_vinay34Încă nu există evaluări
- 11 November 1986Document60 pagini11 November 1986Monitoring TimesÎncă nu există evaluări
- Amp CA3028 IntersilDocument10 paginiAmp CA3028 IntersilHenry Armando Sivirichi CoronelÎncă nu există evaluări
- The Study of Harmonics and LV Energy Compensation - EEPDocument18 paginiThe Study of Harmonics and LV Energy Compensation - EEPSandro CuetoÎncă nu există evaluări
- Nanotechnology in RF and Microwave ApplicationsDocument10 paginiNanotechnology in RF and Microwave ApplicationssfgavasdfgÎncă nu există evaluări
- Filter Design Report 15 PDFDocument5 paginiFilter Design Report 15 PDFLudy FajardoÎncă nu există evaluări
- Design of Microwave FiltersDocument11 paginiDesign of Microwave FiltersArpit SinghÎncă nu există evaluări
- Single Chip Karaoke Processor: DescriptionDocument28 paginiSingle Chip Karaoke Processor: DescriptionahmedÎncă nu există evaluări
- MC3362 FM ReceiverDocument8 paginiMC3362 FM ReceiverzafarnazÎncă nu există evaluări
- 1.0 Introduction To Filter: RF Engineering - Passive Circuit Microstrip Filter DesignDocument20 pagini1.0 Introduction To Filter: RF Engineering - Passive Circuit Microstrip Filter DesignapecevsbÎncă nu există evaluări
- A Two-Tone Test Method For Continuous-Time Adaptive EqualizersDocument7 paginiA Two-Tone Test Method For Continuous-Time Adaptive EqualizersNidhi GuptaÎncă nu există evaluări
- Ta 0104 ADocument18 paginiTa 0104 AJump DownÎncă nu există evaluări