S-ar putea să vă placă și
- TECLADO MATRICIAL CON KEYPADDocument7 paginiTECLADO MATRICIAL CON KEYPADJoseph Maury PàrragaÎncă nu există evaluări
- De Cero A GerberDocument29 paginiDe Cero A GerberOmar QuispeÎncă nu există evaluări
- Uso Básico de PuTTY SSHDocument30 paginiUso Básico de PuTTY SSHOskar SabinoÎncă nu există evaluări
- Plantilla de Curriculum Vitae para EstudiantesDocument2 paginiPlantilla de Curriculum Vitae para EstudiantesSandra Ramos ColoniaÎncă nu există evaluări
- Ensayo Historia de La ComputaciónDocument11 paginiEnsayo Historia de La ComputaciónRodrigo Olave Vera80% (5)
- Promart LLAVEDocument2 paginiPromart LLAVEOmar QuispeÎncă nu există evaluări
- CE82 2023 1A SEM4 SESIÓN 4.2 FUNCIÓN - AnotacionesDocument36 paginiCE82 2023 1A SEM4 SESIÓN 4.2 FUNCIÓN - AnotacionesOmar QuispeÎncă nu există evaluări
- CE82 2023 1A SEM6 SESION 6.1 FUNCION CUADRATICA Y APLICACIONES - AnotacionesDocument32 paginiCE82 2023 1A SEM6 SESION 6.1 FUNCION CUADRATICA Y APLICACIONES - AnotacionesOmar QuispeÎncă nu există evaluări
- Evita desastres con DRCDocument6 paginiEvita desastres con DRCOmar QuispeÎncă nu există evaluări
- CE82 2023 1A SEM7 SESION 7.1 ECUACIONES EXPONENCIALES Y LOGARITMICAS APLICACIONES - AnotacionesDocument46 paginiCE82 2023 1A SEM7 SESION 7.1 ECUACIONES EXPONENCIALES Y LOGARITMICAS APLICACIONES - AnotacionesOmar QuispeÎncă nu există evaluări
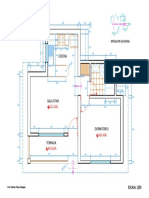
- Plano 2-ADocument1 paginăPlano 2-AOmar QuispeÎncă nu există evaluări
- Tecnologías de PCBDocument37 paginiTecnologías de PCBOmar QuispeÎncă nu există evaluări
- CE82 2023 1A SEM7 SESION 7.2 RAZONES TRIGONOM TRICAS - AnotacionesDocument17 paginiCE82 2023 1A SEM7 SESION 7.2 RAZONES TRIGONOM TRICAS - AnotacionesOmar QuispeÎncă nu există evaluări
- Service and Rate Guide Pe Es 2021Document27 paginiService and Rate Guide Pe Es 2021Omar QuispeÎncă nu există evaluări
- Practica Chapa MetálicaDocument1 paginăPractica Chapa MetálicaOmar QuispeÎncă nu există evaluări
- Jerarquia EsquemasDocument6 paginiJerarquia EsquemasOmar QuispeÎncă nu există evaluări
- Alvarado Fernandez Deza ConcoriDocument187 paginiAlvarado Fernandez Deza ConcoriOmar QuispeÎncă nu există evaluări
- Plano 2-BDocument1 paginăPlano 2-BOmar QuispeÎncă nu există evaluări
- Active Route Multiple PCBDocument3 paginiActive Route Multiple PCBOmar QuispeÎncă nu există evaluări
- Diseño Electronico Con Altium Designer D2Document92 paginiDiseño Electronico Con Altium Designer D2Itzel Contreras CarmonaÎncă nu există evaluări
- Analisis PDN - CCDocument13 paginiAnalisis PDN - CCOmar QuispeÎncă nu există evaluări
- REGLAS DE DISEÑO Y ESTANDARES INDUSTRIALES - PDF Descargar LibreDocument38 paginiREGLAS DE DISEÑO Y ESTANDARES INDUSTRIALES - PDF Descargar LibreOmar QuispeÎncă nu există evaluări
- EAGLEDocument32 paginiEAGLEOmar QuispeÎncă nu există evaluări
- AltiumDocument25 paginiAltiumJose SCÎncă nu există evaluări
- Carro Explorador Un Campo para La AgriculturaDocument9 paginiCarro Explorador Un Campo para La AgriculturaOmar QuispeÎncă nu există evaluări
- Arm EschrDocument2 paginiArm EschrOmar QuispeÎncă nu există evaluări
- Info 23 GHZDocument11 paginiInfo 23 GHZOmar QuispeÎncă nu există evaluări
- VCC3V3 circuit diagramDocument1 paginăVCC3V3 circuit diagramNguyễn Hưng100% (1)
- Síntomas Del AlcoholismoDocument3 paginiSíntomas Del AlcoholismoOmar QuispeÎncă nu există evaluări
- YX5200-24SS DFPlayer PDFDocument38 paginiYX5200-24SS DFPlayer PDFalberto wilber rivera canales100% (1)
- Entendiendo Las Graficas de Polos y Ceros en El Plano Z 1Document5 paginiEntendiendo Las Graficas de Polos y Ceros en El Plano Z 1Omar QuispeÎncă nu există evaluări
- Linux Calse1Document2 paginiLinux Calse1Omar QuispeÎncă nu există evaluări
- En Esta Práctica Hemos Logrado Conocer El Autotransformador Asicomo El Diodo RectificadorDocument2 paginiEn Esta Práctica Hemos Logrado Conocer El Autotransformador Asicomo El Diodo RectificadorOmar QuispeÎncă nu există evaluări
- Manual Instrucciones Dymo Labelwriter 450Document30 paginiManual Instrucciones Dymo Labelwriter 450carmenÎncă nu există evaluări
- Manual de Capacitación VocollectDocument90 paginiManual de Capacitación VocollectGustavo Molina50% (2)
- Apuntes de ExcelDocument2 paginiApuntes de ExcelNICOL FRANCISCA NAVARRO SEPULVEDAÎncă nu există evaluări
- Switch Aruba 2930MDocument2 paginiSwitch Aruba 2930Myopak9Încă nu există evaluări
- Cursos Crecic ConcepcionDocument2 paginiCursos Crecic Concepcionberserkerelfico1810Încă nu există evaluări
- SE Practica1Document19 paginiSE Practica1Derlis Hernández LaraÎncă nu există evaluări
- Guía de Lenguaje de Programación IIDocument146 paginiGuía de Lenguaje de Programación IIEdison E Pariona RojasÎncă nu există evaluări
- Como Hacer Un Video Clip 1071 K5ns6yDocument3 paginiComo Hacer Un Video Clip 1071 K5ns6yCamila ZuñigaÎncă nu există evaluări
- 8-Tutorial para Intervención en Mural de PadletDocument5 pagini8-Tutorial para Intervención en Mural de PadletLeticiadelaFuenteÎncă nu există evaluări
- Guia 3Document6 paginiGuia 3Abril VillanuevaÎncă nu există evaluări
- T O S H I B A TRX-80 by MediosLibres V1.0Document9 paginiT O S H I B A TRX-80 by MediosLibres V1.0Xavier HernándezÎncă nu există evaluări
- Utilitarios InformaticosDocument10 paginiUtilitarios InformaticosLEYCI MARLEN SANCHEZ SALCEDOÎncă nu există evaluări
- Configuración básica de redesDocument3 paginiConfiguración básica de redesWendy Nathalia50% (2)
- Inventario Peroneriìa Carcasiì - Junio 06 de 2017..........Document13 paginiInventario Peroneriìa Carcasiì - Junio 06 de 2017..........Claudia Milena CondeÎncă nu există evaluări
- Intel Dg41cn MicroDocument3 paginiIntel Dg41cn MicroMiguel Angel Castillo BerrospiÎncă nu există evaluări
- Presentación PROTOCOLOS TCP-IP PDFDocument24 paginiPresentación PROTOCOLOS TCP-IP PDFCarlDavidÎncă nu există evaluări
- GlosariosDocument59 paginiGlosariosGuadalupe AzarÎncă nu există evaluări
- Clase Modelo Eleazar Guzman Barron AncashDocument9 paginiClase Modelo Eleazar Guzman Barron Ancashronaldsantiago1987Încă nu există evaluări
- Clases internas Java: tipos y característicasDocument8 paginiClases internas Java: tipos y característicasluisvar12Încă nu există evaluări
- Laica Oscar - Taller4Document4 paginiLaica Oscar - Taller4Oscar LaicaÎncă nu există evaluări
- LlamadasSOfuncionamientoDocument9 paginiLlamadasSOfuncionamientoWilliam JuniorÎncă nu există evaluări
- Actividad 4Document9 paginiActividad 4Ernesto GarciaÎncă nu există evaluări
- Taller C++ Estructura Repetitiva AnidadaDocument8 paginiTaller C++ Estructura Repetitiva AnidadaEditorial LegendariaÎncă nu există evaluări
- Investigate BIOS or UEFI Settings HechoDocument4 paginiInvestigate BIOS or UEFI Settings HechoSamuel José Roa VenturaÎncă nu există evaluări
- Comparación XIAOMIDocument7 paginiComparación XIAOMIJulio C. Muñoz RabanalÎncă nu există evaluări
- Encender leds en ruleta indefinidamenteDocument5 paginiEncender leds en ruleta indefinidamenteZebaz PintoÎncă nu există evaluări
- Manual de SistemasDocument66 paginiManual de Sistemasadriana zelayaÎncă nu există evaluări