S-ar putea să vă placă și
- Project Report Speed Control of Induction MotorDocument47 paginiProject Report Speed Control of Induction Motorsrajaprojects0% (1)
- Pulse Width Modulation For Power Converters Principles and Practice PDFDocument734 paginiPulse Width Modulation For Power Converters Principles and Practice PDFAleš Havel100% (5)
- BUCK Driver: MicroprocessorDocument9 paginiBUCK Driver: MicroprocessorMehroz KhanÎncă nu există evaluări
- Design and Implementation of Multiple Output Switch Mode Power SupplyDocument6 paginiDesign and Implementation of Multiple Output Switch Mode Power SupplyseventhsensegroupÎncă nu există evaluări
- VVV VV V V VDocument2 paginiVVV VV V V Vfrizbee45Încă nu există evaluări
- Speed Control of DC Motor Using Pulse Width ModulationDocument30 paginiSpeed Control of DC Motor Using Pulse Width ModulationRatul SarkarÎncă nu există evaluări
- Speed Control of DC Motor Using Pulse Width ModulationDocument5 paginiSpeed Control of DC Motor Using Pulse Width ModulationSyed muhammad zaidi100% (1)
- Design and Implementation of An Observer Controller For A Buck ConverterDocument11 paginiDesign and Implementation of An Observer Controller For A Buck ConverterLee DonghyeeÎncă nu există evaluări
- Conv DC-DC Paper ENglishDocument5 paginiConv DC-DC Paper ENglishpepe890305Încă nu există evaluări
- Designing A Boost-Switching Regulator With The MCP1650Document0 paginiDesigning A Boost-Switching Regulator With The MCP1650Asad MalikÎncă nu există evaluări
- Implementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerDocument6 paginiImplementation of Full-Bridge Current-Fed Resonant Boost Converter Using PIC MicrocontrollerAlonso CoradoÎncă nu există evaluări
- Transition Current Mode Control PDFDocument6 paginiTransition Current Mode Control PDFmalliwi88Încă nu există evaluări
- Speed Control of DC Motor Using PDocument22 paginiSpeed Control of DC Motor Using PAnanth Sai YadavÎncă nu există evaluări
- Microcontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryDocument4 paginiMicrocontroller Based Low Cost Controlled Rectifiers Training Module For Power Electronics LaboratoryJubari FikriÎncă nu există evaluări
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 paginiImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupÎncă nu există evaluări
- DC-DC Converter Tutorial: Application Note 2031Document10 paginiDC-DC Converter Tutorial: Application Note 2031Mou LaliÎncă nu există evaluări
- Electrical - Ijeeer - Wavelet Modulated Z-SourceDocument10 paginiElectrical - Ijeeer - Wavelet Modulated Z-SourceTJPRC PublicationsÎncă nu există evaluări
- A Single Phase, Single Stage Three Level Boost DC - DC ConverterDocument5 paginiA Single Phase, Single Stage Three Level Boost DC - DC Converterijsret100% (1)
- Artigo Cientifico Ponte de CicloconversorDocument6 paginiArtigo Cientifico Ponte de CicloconversordelvaneijrÎncă nu există evaluări
- Digital Control Methods Sharing Synchronous Converter: For Current of Interleaved Buck AndreassenDocument7 paginiDigital Control Methods Sharing Synchronous Converter: For Current of Interleaved Buck Andreassenrmsharma1970Încă nu există evaluări
- Maximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterDocument6 paginiMaximum Power Point Tracking For Wind Energy Conversion System of Doubly Fed Induction Generator Using Z-Source InverterManoj KumarÎncă nu există evaluări
- A High Efficiency Boost Converter For TFT-LCD Bias SupplyDocument4 paginiA High Efficiency Boost Converter For TFT-LCD Bias SupplyHamid BoualiÎncă nu există evaluări
- Drives Manual Final EeeDocument60 paginiDrives Manual Final EeenandhakumarmeÎncă nu există evaluări
- Switching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Document17 paginiSwitching Power Supply Design Review - 60 Watt Flyback Regulator by Raoji Patel and Glen FRFTZ Slup072Burlacu AndreiÎncă nu există evaluări
- 60W Flyback TIDocument16 pagini60W Flyback TIe_magazin3821Încă nu există evaluări
- Lesson 3 TaD AE DC-DC ConverterDocument10 paginiLesson 3 TaD AE DC-DC ConverterHoi HoiÎncă nu există evaluări
- Protection of Distribution Transformer by Using SCADADocument45 paginiProtection of Distribution Transformer by Using SCADAbharathdaruru204100% (1)
- D Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various ProtectionsDocument6 paginiD Single Phase Fully: Esign of Controlled Converter Using Cosine Wave Crossing Control With Various Protectionsঅর্ণব কোলেÎncă nu există evaluări
- Design and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerDocument12 paginiDesign and Implementation of Space Vector PWM Inverter Based On A Low Cost MicrocontrollerHaider NeamaÎncă nu există evaluări
- UNIT-4 Special Ics The 555 Timer IcDocument10 paginiUNIT-4 Special Ics The 555 Timer IcVerloves LoveÎncă nu există evaluări
- SPWM V/HZ InverterDocument51 paginiSPWM V/HZ InverterLabi BajracharyaÎncă nu există evaluări
- Multi-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LDocument6 paginiMulti-Modular Multi-Level Pulse Width Modulated Inverters: Mon W LveguruprasadÎncă nu există evaluări
- DC ChopperDocument37 paginiDC ChopperAnuroopÎncă nu există evaluări
- DC Chopper PDFDocument37 paginiDC Chopper PDFmadhubalagangapureÎncă nu există evaluări
- Nov 2011 Atul1Document10 paginiNov 2011 Atul1Rajeev RawatÎncă nu există evaluări
- Single Phase PWM InverterDocument11 paginiSingle Phase PWM InverterFoom A. Alshekh100% (2)
- Family Controller PFCDocument8 paginiFamily Controller PFCWesley de PaulaÎncă nu există evaluări
- EI5007W2Document17 paginiEI5007W2PyiAungÎncă nu există evaluări
- Novel Technology For Digital Controlled UPS Inverter: ReviewDocument6 paginiNovel Technology For Digital Controlled UPS Inverter: ReviewDhuvi LuvioÎncă nu există evaluări
- UC3845 Technical ExplanationDocument15 paginiUC3845 Technical ExplanationankurmalviyaÎncă nu există evaluări
- Ijeet: International Journal of Electrical Engineering & Technology (Ijeet)Document11 paginiIjeet: International Journal of Electrical Engineering & Technology (Ijeet)IAEME PublicationÎncă nu există evaluări
- Design and Customization of Embedded Based Direct Torque Controller OfInduction MotorDocument6 paginiDesign and Customization of Embedded Based Direct Torque Controller OfInduction MotorTJPRC PublicationsÎncă nu există evaluări
- Analysis and Modeling of Digital Peak Current Mode ControlDocument6 paginiAnalysis and Modeling of Digital Peak Current Mode Controltinhmaixatoi2006Încă nu există evaluări
- Exp No 1Document9 paginiExp No 1arooj aslamÎncă nu există evaluări
- Resonant DC Link in PWM AC ChopperDocument5 paginiResonant DC Link in PWM AC ChopperMukesh SharmaÎncă nu există evaluări
- Space Vector PWM - 2Document6 paginiSpace Vector PWM - 2guanitouÎncă nu există evaluări
- Doc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFDocument66 paginiDoc-A.9-Driver Card For Single Phase Inverter Using Skhi22br PDFsivananda11Încă nu există evaluări
- Drives Semi-FinalDocument24 paginiDrives Semi-FinalProsper K. PhiriÎncă nu există evaluări
- Eng-Embedded Boost Converter Using Voltage-G.senthil KumarDocument6 paginiEng-Embedded Boost Converter Using Voltage-G.senthil KumarImpact JournalsÎncă nu există evaluări
- VX Ring Suppression: Current Sensor ADocument2 paginiVX Ring Suppression: Current Sensor AVijyashree IyerÎncă nu există evaluări
- 2012 1 13 Interleaaved ConverterDocument5 pagini2012 1 13 Interleaaved ConverterIonescu ViorelÎncă nu există evaluări
- Pulse Width ModulationDocument7 paginiPulse Width ModulationAnonymous E4Rbo2sÎncă nu există evaluări
- Soft Start Circuit For Peak Current Mode DC-DC ConverterDocument5 paginiSoft Start Circuit For Peak Current Mode DC-DC ConverterHassan SharghiÎncă nu există evaluări
- ChoppersDocument135 paginiChoppersSrinivasRaoÎncă nu există evaluări
- Design and Implementation of Welding With Electromagnetic Trailing Peening Control CircuitDocument4 paginiDesign and Implementation of Welding With Electromagnetic Trailing Peening Control CircuitSamuel ChristyÎncă nu există evaluări
- Ec 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsDocument68 paginiEc 4112: Analog Communication Laboratory List of Experiments: Compulsory ExperimentsArchit SrivastavaÎncă nu există evaluări
- SPEED CONTROL OF SINGLE PHASE INDUCTION MOTOR" BY USING TRIAC - PPTDocument30 paginiSPEED CONTROL OF SINGLE PHASE INDUCTION MOTOR" BY USING TRIAC - PPTGökhan KAYA100% (2)
- Solar InvereterDocument47 paginiSolar InvereterReshma RaviÎncă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Încă nu există evaluări
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1De la EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Evaluare: 2.5 din 5 stele2.5/5 (3)
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsDe la EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsÎncă nu există evaluări
- Compiled Sheet Tie DCs ProjectDocument23 paginiCompiled Sheet Tie DCs ProjectMehroz KhanÎncă nu există evaluări
- 30 06 2020Document9 pagini30 06 2020Mehroz KhanÎncă nu există evaluări
- 012 - Completed Orders - 012 - Completed Order ReportDocument30 pagini012 - Completed Orders - 012 - Completed Order ReportMehroz KhanÎncă nu există evaluări
- Output 11Document17 paginiOutput 11Mehroz KhanÎncă nu există evaluări
- Compiled Sheet Tie DCs ProjectDocument10 paginiCompiled Sheet Tie DCs ProjectMehroz KhanÎncă nu există evaluări
- CTR - Boq (38714)Document12 paginiCTR - Boq (38714)Mehroz KhanÎncă nu există evaluări
- 01-07-2020Document8 pagini01-07-2020Mehroz KhanÎncă nu există evaluări
- Drop Wire April 2019Document9 paginiDrop Wire April 2019Mehroz KhanÎncă nu există evaluări
- Pakistan Telecommunications Company Limited: Office of Assistant Business Manager Kasur UrbanDocument1 paginăPakistan Telecommunications Company Limited: Office of Assistant Business Manager Kasur UrbanMehroz KhanÎncă nu există evaluări
- Ass1 (Psa)Document14 paginiAss1 (Psa)Mehroz KhanÎncă nu există evaluări
- Volunteering SOPDocument1 paginăVolunteering SOPMehroz KhanÎncă nu există evaluări
- Bms Count - Bms Kasur 506 Nankana 505 Okara 1083 Pakpattan 473 Rural Lahore 775 Sahiwal 1230 Sheikhupura 970Document15 paginiBms Count - Bms Kasur 506 Nankana 505 Okara 1083 Pakpattan 473 Rural Lahore 775 Sahiwal 1230 Sheikhupura 970Mehroz KhanÎncă nu există evaluări
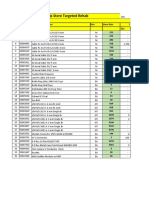
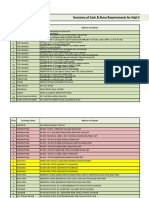
- Summary of Cash & Store Requirements For High Fault Dcs Renovation CTRDocument8 paginiSummary of Cash & Store Requirements For High Fault Dcs Renovation CTRMehroz KhanÎncă nu există evaluări
- Untitled 2Document2 paginiUntitled 2Mehroz KhanÎncă nu există evaluări
- New Text DocumentDocument1 paginăNew Text DocumentMehroz KhanÎncă nu există evaluări
- Untitled 2.odsDocument2 paginiUntitled 2.odsMehroz KhanÎncă nu există evaluări
- University of Engineering and Technology Taxila Electrical Engineering Department Lab ManualDocument1 paginăUniversity of Engineering and Technology Taxila Electrical Engineering Department Lab ManualMehroz KhanÎncă nu există evaluări
- Lec1 IntroductionDocument52 paginiLec1 IntroductionMehroz KhanÎncă nu există evaluări
- New DocumentDocument2 paginiNew DocumentMehroz KhanÎncă nu există evaluări
- 1Document26 pagini1Mehroz KhanÎncă nu există evaluări
- Inductor Voltage Graph For 5T T 2msDocument1 paginăInductor Voltage Graph For 5T T 2msMehroz KhanÎncă nu există evaluări
- Lamps: 1. Incandescent Lamp 2. Arc Lamp 3. Gaseous Discharge LampDocument8 paginiLamps: 1. Incandescent Lamp 2. Arc Lamp 3. Gaseous Discharge LampMehroz KhanÎncă nu există evaluări
- 1Document26 pagini1Mehroz KhanÎncă nu există evaluări
- U PDocument9 paginiU PMehroz KhanÎncă nu există evaluări
- Project 3Document1 paginăProject 3Mehroz KhanÎncă nu există evaluări
- Reg - 51.hDocument2 paginiReg - 51.hCostin AndreiÎncă nu există evaluări
- New DocumentDocument2 paginiNew DocumentMehroz KhanÎncă nu există evaluări
- Reg - 51.hDocument2 paginiReg - 51.hCostin AndreiÎncă nu există evaluări
- GPU 2 Manual de InstalaciónDocument75 paginiGPU 2 Manual de InstalaciónjjcanoolivaresÎncă nu există evaluări
- Technical Specifications For 1.5 Kva Online UpsDocument13 paginiTechnical Specifications For 1.5 Kva Online Upsupol88Încă nu există evaluări
- AL8861EV1 User GuideDocument8 paginiAL8861EV1 User GuideHans ClarinÎncă nu există evaluări
- MIP2K2 Panasonic PDFDocument2 paginiMIP2K2 Panasonic PDFHoang LeÎncă nu există evaluări
- M7B07v1 0Document154 paginiM7B07v1 0JBBIllonesÎncă nu există evaluări
- Advanced Motion Controls DPRAHIS-060A400Document11 paginiAdvanced Motion Controls DPRAHIS-060A400Servo2GoÎncă nu există evaluări
- Advanced View Arduino Projects List - Use Arduino For ProjectsDocument107 paginiAdvanced View Arduino Projects List - Use Arduino For ProjectsBilal AfzalÎncă nu există evaluări
- Advanced Regulating Pulse Width Modulators: Description FeaturesDocument8 paginiAdvanced Regulating Pulse Width Modulators: Description FeaturesTamo NekoÎncă nu există evaluări
- CricketDocument22 paginiCricketStanValentin87Încă nu există evaluări
- Small DC Motor Control by PWM Method Using Atmega8Document4 paginiSmall DC Motor Control by PWM Method Using Atmega8Emin KültürelÎncă nu există evaluări
- Codigos SP y SC Aficio 2075Document212 paginiCodigos SP y SC Aficio 2075Xelcop RojasÎncă nu există evaluări
- IEEE Papaers RequiredDocument7 paginiIEEE Papaers Requiredg.jayakrishnaÎncă nu există evaluări
- Zerone: Safety Drone With Blade-Free Propulsion: Wataru Yamada Hiroyuki Manabe Daizo IkedaDocument8 paginiZerone: Safety Drone With Blade-Free Propulsion: Wataru Yamada Hiroyuki Manabe Daizo IkedaНикола ЈовановићÎncă nu există evaluări
- FSDM0565R: Green Mode Fairchild Power Switch (FPS)Document20 paginiFSDM0565R: Green Mode Fairchild Power Switch (FPS)Najam Ul HassanÎncă nu există evaluări
- XC9120 TorexDocument17 paginiXC9120 TorexKarolis KriščiūnasÎncă nu există evaluări
- Delta Release Notes v504 EDocument29 paginiDelta Release Notes v504 Ehoesy1Încă nu există evaluări
- DC Motor Speed Control Using PWMDocument5 paginiDC Motor Speed Control Using PWMbunny creationsÎncă nu există evaluări
- Features: Highly-Integrated Green-Mode PWM ControllerDocument14 paginiFeatures: Highly-Integrated Green-Mode PWM ControllerVlad IulianÎncă nu există evaluări
- Literature Review of D ProjectDocument17 paginiLiterature Review of D ProjectPhani Kiran100% (1)
- AF-902 and AF-904Document99 paginiAF-902 and AF-904Lim Seok WooÎncă nu există evaluări
- EV2000Document129 paginiEV2000Vladimir Colombiano de Souza100% (1)
- HT46R066B 12Document98 paginiHT46R066B 12Juan CoronelÎncă nu există evaluări
- 2018 Sports Ilp-Guidance-Note-2-Guidance-For-Lighting-Of-Televised-Sporting-Events-2018Document8 pagini2018 Sports Ilp-Guidance-Note-2-Guidance-For-Lighting-Of-Televised-Sporting-Events-2018rawal madanÎncă nu există evaluări
- So, Which PWM Technique Is Best? (Part 3) : Dave Wilson, Motion Products Evangelist, Texas InstrumentsDocument3 paginiSo, Which PWM Technique Is Best? (Part 3) : Dave Wilson, Motion Products Evangelist, Texas InstrumentsChetan KulkarniÎncă nu există evaluări
- FM Receiver FPGADocument76 paginiFM Receiver FPGAAndre HuiÎncă nu există evaluări
- Brushless DC Motor DriverDocument3 paginiBrushless DC Motor Driverkvamsee112Încă nu există evaluări
- KS5003 (KS5004) Keyestudio ESP32 42 in 1 Sensor KitDocument351 paginiKS5003 (KS5004) Keyestudio ESP32 42 in 1 Sensor KitMeidelyn Chris Martínez ArizaÎncă nu există evaluări
- Cmps 03Document12 paginiCmps 03yofianajÎncă nu există evaluări
- DLPC4422 DLP Display Controller: ® 1 FeaturesDocument49 paginiDLPC4422 DLP Display Controller: ® 1 Featureskishore_bulli6666Încă nu există evaluări