S-ar putea să vă placă și
- Maws V1Document5 paginiMaws V1Isabel TadyÎncă nu există evaluări
- PCAMatematica 8Document18 paginiPCAMatematica 8Isabel TadyÎncă nu există evaluări
- ErikaTaday MuestreoDocument3 paginiErikaTaday MuestreoIsabel TadyÎncă nu există evaluări
- Informe Redes 1....Document13 paginiInforme Redes 1....Isabel TadyÎncă nu există evaluări
- Variables Aleatorias (2) (Autoguardado)Document43 paginiVariables Aleatorias (2) (Autoguardado)Isabel TadyÎncă nu există evaluări
- Diagarama de Flujo PDFDocument1 paginăDiagarama de Flujo PDFIsabel TadyÎncă nu există evaluări
- Copia de DiagramadeGanttDocument3 paginiCopia de DiagramadeGanttIsabel TadyÎncă nu există evaluări
- Control FractarDocument10 paginiControl FractarIsabel TadyÎncă nu există evaluări
- Pasos para Realizar Un Análisis de VarianzaDocument1 paginăPasos para Realizar Un Análisis de VarianzaErnesto CruzÎncă nu există evaluări
- Deber RedacciónDocument1 paginăDeber RedacciónIsabel TadyÎncă nu există evaluări
- Cim Desamble de Motor Grupo3Document4 paginiCim Desamble de Motor Grupo3Isabel TadyÎncă nu există evaluări
- El Socialismo Del Siglo XVI Ha Beneficiado o No Al PaísDocument1 paginăEl Socialismo Del Siglo XVI Ha Beneficiado o No Al PaísIsabel TadyÎncă nu există evaluări
- ControlDocument15 paginiControlAgelito MgÎncă nu există evaluări
- PsicologiaDocument2 paginiPsicologiaIsabel TadyÎncă nu există evaluări
- Mi Proyecto Sav PDFDocument21 paginiMi Proyecto Sav PDFIsabel TadyÎncă nu există evaluări
- Android Studio: Componentes para Desarrollar AplicacionesDocument14 paginiAndroid Studio: Componentes para Desarrollar AplicacionesIsabel TadyÎncă nu există evaluări
- EJ10Document19 paginiEJ10Isabel TadyÎncă nu există evaluări
- Reglamento de Régimen AcadémicoDocument1 paginăReglamento de Régimen AcadémicoIsabel TadyÎncă nu există evaluări
- Mi Proyecto SiDocument23 paginiMi Proyecto SiIsabel TadyÎncă nu există evaluări
- Mi Proyecto SiDocument23 paginiMi Proyecto SiIsabel TadyÎncă nu există evaluări
- Eda 1Document30 paginiEda 1Isabel TadyÎncă nu există evaluări
- Deber Riesgos QDocument3 paginiDeber Riesgos QIsabel TadyÎncă nu există evaluări
- Onda Cuadrada Con Software Derive PDFDocument3 paginiOnda Cuadrada Con Software Derive PDFIsabel TadyÎncă nu există evaluări
- Practica CompletaDocument7 paginiPractica CompletaIsabel TadyÎncă nu există evaluări
- Clase 2 EDADocument19 paginiClase 2 EDAIsabel TadyÎncă nu există evaluări
- Sistem As ControlDocument63 paginiSistem As ControlC Raziel Fdz OÎncă nu există evaluări
- Clase 2 EDADocument19 paginiClase 2 EDAIsabel TadyÎncă nu există evaluări
- Deber1 Erika TadayDocument3 paginiDeber1 Erika TadayIsabel TadyÎncă nu există evaluări
- Deber 1Document4 paginiDeber 1Isabel TadyÎncă nu există evaluări
- 108S10 Amanco Desarrollo El Scorecard de SustentabilidadDocument26 pagini108S10 Amanco Desarrollo El Scorecard de SustentabilidadRikardo Medina0% (1)
- A2 DVMHDocument10 paginiA2 DVMHvanistel vanistelÎncă nu există evaluări
- Ajuste de Pull RollsDocument15 paginiAjuste de Pull RollsCalidad QueretaroÎncă nu există evaluări
- Costo Del Control ConcurrenteDocument5 paginiCosto Del Control ConcurrentedoochÎncă nu există evaluări
- Resolucion 2190 de 1991Document7 paginiResolucion 2190 de 1991Felipe HoyosÎncă nu există evaluări
- Clasificación de Bosniak de Masas Renales QuísticDocument1 paginăClasificación de Bosniak de Masas Renales QuísticJosé Luis Barrantes TicllaÎncă nu există evaluări
- Edel Navarro, R. - Las Nuevas Tecnologías para El Aprendizaje - Estado Del ArteDocument20 paginiEdel Navarro, R. - Las Nuevas Tecnologías para El Aprendizaje - Estado Del ArteEdmundo Paredes DíazÎncă nu există evaluări
- Diseño de Mezclas Concreto Fast Track en Reparación y Rehabilitación deDocument6 paginiDiseño de Mezclas Concreto Fast Track en Reparación y Rehabilitación deLider Ricardo Alarcon CardenasÎncă nu există evaluări
- Paisajismo y su aplicación en el campo gráficoDocument24 paginiPaisajismo y su aplicación en el campo gráficoChristian SantivañezÎncă nu există evaluări
- Dinámica de un automóvil: frenadoDocument26 paginiDinámica de un automóvil: frenadoFANNY PUMAÎncă nu există evaluări
- Ibm Spss v20 AmosDocument8 paginiIbm Spss v20 AmosBruno Barra PezoÎncă nu există evaluări
- Dafo Empresa Manuelita S.A.Document3 paginiDafo Empresa Manuelita S.A.AriannaÎncă nu există evaluări
- Sílabo Economía General (Rebuild) PDFDocument4 paginiSílabo Economía General (Rebuild) PDFLuis Antonio Olivera VasquezÎncă nu există evaluări
- Texto Escolar 6 (Tomo1)Document322 paginiTexto Escolar 6 (Tomo1)Luis67% (9)
- Tren ElectromagneticoDocument12 paginiTren ElectromagneticoSnakeeMxÎncă nu există evaluări
- Convesion E-R Al RelacionalDocument13 paginiConvesion E-R Al RelacionalErnesto SÎncă nu există evaluări
- Optimizacion Mediante Algoritmos GeneticosDocument11 paginiOptimizacion Mediante Algoritmos GeneticosrafaelÎncă nu există evaluări
- Crear Controles en Tiempo de EjecucionDocument2 paginiCrear Controles en Tiempo de EjecucionelidatoÎncă nu există evaluări
- TAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoDocument2 paginiTAREA-Caso Practico 1 Ingeniería Ambiental Legislacion A EnviadoJulissa FeijooÎncă nu există evaluări
- Comandos Del DDocument3 paginiComandos Del DNick NicolasÎncă nu există evaluări
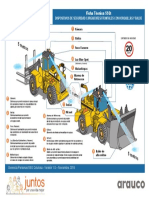
- Ficha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeDocument1 paginăFicha Técnica SSO Dispositivos de Seguridad Cargadores Frontales Con Horquillas y BaldeCamilo Milo100% (1)
- Ensayos de compactación de suelosDocument18 paginiEnsayos de compactación de suelosAnonismosÎncă nu există evaluări
- Historia Del Timbal SinfónicoDocument14 paginiHistoria Del Timbal SinfónicoeduardoÎncă nu există evaluări
- Manual de Prácticas Módulo 1 Subm. 2Document56 paginiManual de Prácticas Módulo 1 Subm. 2José Zapata100% (1)
- Cultivo arroz impacto medioambienteDocument2 paginiCultivo arroz impacto medioambientedaniel0% (1)
- Normativas e instalaciones residencialesDocument5 paginiNormativas e instalaciones residencialesJeison David CamposÎncă nu există evaluări
- EjerciciosDocument17 paginiEjerciciosGerO' Fonseca44% (57)
- Prueba 3° Básico - Características de La LuzDocument5 paginiPrueba 3° Básico - Características de La LuzXimena Villavicencio0% (1)
- Clasificacion y Especificiones de Las Unidades de AlbañileriaDocument27 paginiClasificacion y Especificiones de Las Unidades de AlbañileriajavierÎncă nu există evaluări