S-ar putea să vă placă și
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970De la EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallÎncă nu există evaluări
- School Profile 2023-24Document2 paginiSchool Profile 2023-24api-551294547Încă nu există evaluări
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)De la EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Încă nu există evaluări
- Lesson3 7industrial Robot App QuizbDocument2 paginiLesson3 7industrial Robot App QuizbJairo TanyagÎncă nu există evaluări
- VoucherDocument1 paginăVoucherDane DadivasÎncă nu există evaluări
- Bi CourseoutlineDocument12 paginiBi Courseoutlineapi-293624261Încă nu există evaluări
- DeliveryDocument1 paginăDeliveryapi-264092088Încă nu există evaluări
- What Is A Fiduciary Duty - Examples and Types ExplainedDocument1 paginăWhat Is A Fiduciary Duty - Examples and Types ExplainedMaxÎncă nu există evaluări
- Skip The Counter - Alamo Rent A CarDocument2 paginiSkip The Counter - Alamo Rent A CarEduardo Fernandez100% (1)
- ANZ Receipt - Ref 1567548282 - PDFDocument1 paginăANZ Receipt - Ref 1567548282 - PDFMercedes SteelÎncă nu există evaluări
- College Credit OptionsDocument23 paginiCollege Credit OptionsinforumdocsÎncă nu există evaluări
- Mthompson LTT Block 4 SubmissionDocument7 paginiMthompson LTT Block 4 Submissionapi-307961766Încă nu există evaluări
- Gmail - Expedia Car Rental Confirmation - Wed, May 31 - (Itinerary # 72549861839691)Document6 paginiGmail - Expedia Car Rental Confirmation - Wed, May 31 - (Itinerary # 72549861839691)Hans QuispeÎncă nu există evaluări
- Personal Learning Plans Toolkit 2016-2017Document14 paginiPersonal Learning Plans Toolkit 2016-2017Ishaq Bin SadiqÎncă nu există evaluări
- CMRI Excursions (Prices)Document4 paginiCMRI Excursions (Prices)Anonymous Z7nhXw6Iy7100% (1)
- Reservation Confirmed: Rental DetailsDocument2 paginiReservation Confirmed: Rental Detailsrohanrajore00Încă nu există evaluări
- Accident ReportDocument10 paginiAccident ReportLas Vegas Review-JournalÎncă nu există evaluări
- PLTW Engineering Formula Sheet 2018 (v18.0) : StatisticsDocument11 paginiPLTW Engineering Formula Sheet 2018 (v18.0) : StatisticsCarlyn DansieÎncă nu există evaluări
- Engineering FormulaSheetDocument11 paginiEngineering FormulaSheetKenneth RomuloÎncă nu există evaluări
- Engineering Formula Sheet: StatisticsDocument1 paginăEngineering Formula Sheet: Statisticskrishna_pipingÎncă nu există evaluări
- PLTW Engineering Formula SheetsDocument5 paginiPLTW Engineering Formula SheetsHugo BrunoÎncă nu există evaluări
- Engineering Formula Sheet: StatisticsDocument10 paginiEngineering Formula Sheet: StatisticsManikandan SelvamÎncă nu există evaluări
- Engineering FormulasDocument6 paginiEngineering FormulasgkdimpuÎncă nu există evaluări
- Math Note - STATISTICS - FORMULASDocument4 paginiMath Note - STATISTICS - FORMULASNesrine LaradjiÎncă nu există evaluări
- Fe Engineering Probability StatisticsDocument9 paginiFe Engineering Probability Statisticsvzimak2355Încă nu există evaluări
- StatisticssheetDocument6 paginiStatisticssheetmohÎncă nu există evaluări
- Prob StatDocument21 paginiProb StatJohn Paul AlegreÎncă nu există evaluări
- A 18-Page Statistics & Data Science Cheat SheetsDocument18 paginiA 18-Page Statistics & Data Science Cheat SheetsAniket AggarwalÎncă nu există evaluări
- 5 Math Formula - Probability and StatisticsDocument2 pagini5 Math Formula - Probability and StatisticsRjay Neil D. Ba�asÎncă nu există evaluări
- Mdm4u Fianl Exam Formula PDFDocument1 paginăMdm4u Fianl Exam Formula PDFEliz SawÎncă nu există evaluări
- Statistics PacketDocument17 paginiStatistics Packetmafroosahamed73Încă nu există evaluări
- Waqar - GatewaytobiologyDocument3 paginiWaqar - GatewaytobiologyAtta Ul Mustafa ZainÎncă nu există evaluări
- Lec 02Document25 paginiLec 02banyawhaÎncă nu există evaluări
- Introductory Statistics Formulas and TablesDocument10 paginiIntroductory Statistics Formulas and TablesP KaurÎncă nu există evaluări
- Revision - Elements or Probability: Notation For EventsDocument20 paginiRevision - Elements or Probability: Notation For EventsAnthony Saracasmo GerdesÎncă nu există evaluări
- Statistics For Management and Economics, Tenth Edition FormulasDocument11 paginiStatistics For Management and Economics, Tenth Edition Formulaskumar030290Încă nu există evaluări
- Statistics FormulasDocument2 paginiStatistics FormulasJayson S. Verdeflor100% (1)
- AP Biology: Free-Response QuestionsDocument13 paginiAP Biology: Free-Response QuestionsAnitaÎncă nu există evaluări
- BU255 - All Formulas 2022fallDocument9 paginiBU255 - All Formulas 2022fallTony TheodoropoulosÎncă nu există evaluări
- Formulae SheetDocument11 paginiFormulae Sheetthyanh.vuÎncă nu există evaluări
- Lecture01 Uppsala EQG 12Document39 paginiLecture01 Uppsala EQG 12Henz RabinoÎncă nu există evaluări
- Materials SB: N) K X XDocument11 paginiMaterials SB: N) K X XNgô Hoàng Bích KhaÎncă nu există evaluări
- Stats Cheat SheetDocument2 paginiStats Cheat Sheetkaungwaiphyo89Încă nu există evaluări
- Chapter 3: Categorical AttributesDocument26 paginiChapter 3: Categorical Attributess8nd11d UNIÎncă nu există evaluări
- Mdm4u Formula SheetDocument2 paginiMdm4u Formula SheetNathan BittnerÎncă nu există evaluări
- Review All Chapters Prob-Stats 2022 - PRINTDocument26 paginiReview All Chapters Prob-Stats 2022 - PRINTLe Tran Vu HoangÎncă nu există evaluări
- Open Formula For Probability Distribution 1Document3 paginiOpen Formula For Probability Distribution 1Atiwag, Micha T.Încă nu există evaluări
- Equation SheetDocument5 paginiEquation SheetArisha BasheerÎncă nu există evaluări
- AP Equation FormulasDocument2 paginiAP Equation FormulasKIM JEEHEEÎncă nu există evaluări
- Formulas of StatsDocument12 paginiFormulas of Statsbhanu singhÎncă nu există evaluări
- Key Formulas TablesDocument8 paginiKey Formulas Tablesimam awaluddinÎncă nu există evaluări
- Statistics For Management and EconomicsDocument16 paginiStatistics For Management and Economicsakhil-4108100% (1)
- Probability CheatsheetDocument4 paginiProbability CheatsheetYassine MsaddakÎncă nu există evaluări
- What Is Data Science? Probability Overview Descriptive StatisticsDocument10 paginiWhat Is Data Science? Probability Overview Descriptive StatisticsMauricioRojasÎncă nu există evaluări
- Week5 PDFDocument33 paginiWeek5 PDFosmanfıratÎncă nu există evaluări
- Statistics BI: Models of Random Outcomes. What Is A Model?Document22 paginiStatistics BI: Models of Random Outcomes. What Is A Model?Pedro GouvÎncă nu există evaluări
- Lecture 1Document48 paginiLecture 1GauravÎncă nu există evaluări
- EE 561 Communication Theory Spring 2003Document27 paginiEE 561 Communication Theory Spring 2003Mohamed Ziad AlezzoÎncă nu există evaluări
- Probability Distributions in RDocument42 paginiProbability Distributions in RNaski KuafniÎncă nu există evaluări
- 2.AppliedMathProb Individual 2011Document3 pagini2.AppliedMathProb Individual 2011Yasamin RezashateriÎncă nu există evaluări
- New Ticket For SundayDocument2 paginiNew Ticket For SundayDiyaNegiÎncă nu există evaluări
- Install Notes (Please Read)Document1 paginăInstall Notes (Please Read)DiyaNegiÎncă nu există evaluări
- PBL Drawing Launch PadDocument1 paginăPBL Drawing Launch PadDiyaNegiÎncă nu există evaluări
- Install Notes (Please Read)Document1 paginăInstall Notes (Please Read)DiyaNegiÎncă nu există evaluări
- Parts of PBLDocument1 paginăParts of PBLDiyaNegiÎncă nu există evaluări
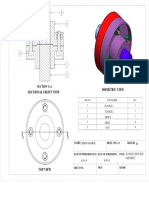
- Flange Coupling AssemblyDocument1 paginăFlange Coupling AssemblyDiyaNegiÎncă nu există evaluări
- Flange Coupling AssemblyDocument1 paginăFlange Coupling AssemblyDiyaNegiÎncă nu există evaluări
- Parts of Launch PadDocument1 paginăParts of Launch PadDiyaNegiÎncă nu există evaluări
- Apprenticeship - Trade Entrance Exam Study GuideDocument37 paginiApprenticeship - Trade Entrance Exam Study GuideWattsoft100% (2)
- New Rich Text DocumentDocument5 paginiNew Rich Text DocumentDiyaNegiÎncă nu există evaluări
- eTicketLucknow2Delhi PDFDocument2 paginieTicketLucknow2Delhi PDFDejau ZodenÎncă nu există evaluări
- Sample Doc File 100kbDocument13 paginiSample Doc File 100kbakshay mishraÎncă nu există evaluări
- French - Grammar - Tense - Booklet and Y12 Summer Task PDFDocument13 paginiFrench - Grammar - Tense - Booklet and Y12 Summer Task PDFAnonymous LVibFVÎncă nu există evaluări
- J EBillSub KK 0366Document1 paginăJ EBillSub KK 0366dukarÎncă nu există evaluări
- (Autonomous) : Page 1 of 17Document17 pagini(Autonomous) : Page 1 of 17tomsonÎncă nu există evaluări
- TD ImportantsDocument6 paginiTD ImportantsDiyaNegiÎncă nu există evaluări
- 6.0L Engine Removal PDFDocument10 pagini6.0L Engine Removal PDFDiyaNegi100% (1)
- Model Answer Winter 2014Document16 paginiModel Answer Winter 2014DiyaNegiÎncă nu există evaluări
- IELTS Advantage. Writing Skills PDFDocument129 paginiIELTS Advantage. Writing Skills PDFDiyaNegiÎncă nu există evaluări
- Photography Format For Imigration CanadaDocument1 paginăPhotography Format For Imigration CanadaFlamur SallahuÎncă nu există evaluări
- Model Answer Winter 2015Document16 paginiModel Answer Winter 2015DiyaNegiÎncă nu există evaluări
- Mind Map: Coreldraw X5: Foundational Skills, Art Production & Special EffectsDocument53 paginiMind Map: Coreldraw X5: Foundational Skills, Art Production & Special EffectsDiyaNegiÎncă nu există evaluări
- Summer 2015 Model Answer PaperDocument23 paginiSummer 2015 Model Answer PaperDiyaNegiÎncă nu există evaluări
- Model Answer Winter 2015Document17 paginiModel Answer Winter 2015DiyaNegiÎncă nu există evaluări
- CapstoneDocument41 paginiCapstoneDiyaNegiÎncă nu există evaluări
- Design of Belt Conveyors Part 1Document32 paginiDesign of Belt Conveyors Part 1anirban687Încă nu există evaluări
- Microcontroller Development BoardsDocument2 paginiMicrocontroller Development BoardsDiyaNegiÎncă nu există evaluări
- The Workshop Manual W26, Edition June 2000Document230 paginiThe Workshop Manual W26, Edition June 2000DiyaNegiÎncă nu există evaluări
- Design of Input Gear-Shaft-ExamplerDocument11 paginiDesign of Input Gear-Shaft-ExamplerGuru PrasadÎncă nu există evaluări
- Assembly To DetailDocument1 paginăAssembly To DetailDiyaNegiÎncă nu există evaluări
- Chapter 3 MethodologyDocument4 paginiChapter 3 MethodologyAllen DizonÎncă nu există evaluări
- Glossary of Statistical Terms and SymbolsDocument4 paginiGlossary of Statistical Terms and SymbolstjatonlineÎncă nu există evaluări
- Practice Exam FinalDocument11 paginiPractice Exam FinalMagalyIpiñaÎncă nu există evaluări
- Module 5 (The Normal Curve)Document12 paginiModule 5 (The Normal Curve)Gabino Pacayo PetilosÎncă nu există evaluări
- PAG 10.1 - Investigating Factors Affecting SHMDocument5 paginiPAG 10.1 - Investigating Factors Affecting SHMjmsonlÎncă nu există evaluări
- C3 PDFDocument15 paginiC3 PDFANH NGUYỄN TRẦN ĐOANÎncă nu există evaluări
- Statistics Course in PsychologyDocument176 paginiStatistics Course in PsychologySpongeBobLongPantsÎncă nu există evaluări
- (Correlation Course) SUP-4B: Solved Problem Set Sub-Topic 2Document12 pagini(Correlation Course) SUP-4B: Solved Problem Set Sub-Topic 2kaicaÎncă nu există evaluări
- MATH 322: Probability and Statistical MethodsDocument27 paginiMATH 322: Probability and Statistical MethodsAwab AbdelhadiÎncă nu există evaluări
- Python Notes 2022Document155 paginiPython Notes 2022Anuj Vishwakarma100% (1)
- Control ChartsDocument62 paginiControl ChartsRadwan AjoÎncă nu există evaluări
- CH 03Document32 paginiCH 03Tanya YablonskayaÎncă nu există evaluări
- MQM100 MultipleChoice Chapter1Document8 paginiMQM100 MultipleChoice Chapter1Nakin K80% (5)
- KinjalDocument96 paginiKinjalAnjali SharmaÎncă nu există evaluări
- The Central Limit TheoremDocument8 paginiThe Central Limit TheoremChriselle RÎncă nu există evaluări
- Workshop 05 - S1 - 2020 - Solutions For Business StatisticsDocument8 paginiWorkshop 05 - S1 - 2020 - Solutions For Business StatisticsKrithik MehtaÎncă nu există evaluări
- PLAXIS 3D2017 Tutorial Lesson 01 FoundationDocument25 paginiPLAXIS 3D2017 Tutorial Lesson 01 Foundationrindra clarkÎncă nu există evaluări
- M/M/1 Queueing ModelDocument12 paginiM/M/1 Queueing ModelSparrowGospleGilbertÎncă nu există evaluări
- 1 Slide IS 310 - Business StatisticsDocument29 pagini1 Slide IS 310 - Business StatisticsSweet EmmeÎncă nu există evaluări
- Motives and Obstacles of International Students Studying in Indian UniversityDocument24 paginiMotives and Obstacles of International Students Studying in Indian UniversityajmrdÎncă nu există evaluări
- Unit II Lesson 2 Understanding The Z-ScoresDocument14 paginiUnit II Lesson 2 Understanding The Z-ScoresBernadette Remigio - JovellanosÎncă nu există evaluări
- Name: - Bio 180 Problem Set IiDocument2 paginiName: - Bio 180 Problem Set IiJoshua OliverosÎncă nu există evaluări
- Thera Bank-ProjectDocument26 paginiThera Bank-Projectpratik zanke100% (12)
- STAT 112 20172S - y ExamWeek 10 - Quarterly Exam - QuarterlDocument4 paginiSTAT 112 20172S - y ExamWeek 10 - Quarterly Exam - QuarterlArmanÎncă nu există evaluări
- Chapter 3 - Describing DataDocument39 paginiChapter 3 - Describing DatazanibabÎncă nu există evaluări
- Determining The Sample Size (Continuous Data)Document4 paginiDetermining The Sample Size (Continuous Data)Surbhi Jain100% (1)
- Icfaitech Coursehandout 10 PDFDocument183 paginiIcfaitech Coursehandout 10 PDFNagendra KumarÎncă nu există evaluări
- TRUGO ChiSquareDocument8 paginiTRUGO ChiSquaremoreÎncă nu există evaluări
- Psy 103 Chapter 2Document7 paginiPsy 103 Chapter 2maeveflavourÎncă nu există evaluări
- U3-L4 - Sampling DistributionsDocument25 paginiU3-L4 - Sampling DistributionsSudhagar DÎncă nu există evaluări