S-ar putea să vă placă și
- SIMOTION ProjectGenerator Parameter Manual V1 2 PDFDocument124 paginiSIMOTION ProjectGenerator Parameter Manual V1 2 PDFKhaled OuniÎncă nu există evaluări
- ProjectGenerator V1 2Document68 paginiProjectGenerator V1 2Khaled OuniÎncă nu există evaluări
- Step 7 Pid Temperature Control 7193Document102 paginiStep 7 Pid Temperature Control 7193hellboylovingÎncă nu există evaluări
- S7-1200 OPC SIMATIC-NET eDocument25 paginiS7-1200 OPC SIMATIC-NET esamueljlssÎncă nu există evaluări
- S7-1200 PID CompactDocument50 paginiS7-1200 PID Compactg10357801Încă nu există evaluări
- S7-1200 OPC SIMATIC-NET eDocument25 paginiS7-1200 OPC SIMATIC-NET esamueljlssÎncă nu există evaluări
- PROFINET - The Industrial Ethernet Standard: © Siemens AG 2013. Alle Rechte VorbehaltenDocument22 paginiPROFINET - The Industrial Ethernet Standard: © Siemens AG 2013. Alle Rechte VorbehaltenKhaled Ouni100% (2)
- Dasar Dasar PLCDocument65 paginiDasar Dasar PLCAgie FernandezÎncă nu există evaluări
- PROJECT3 WinCCDocument17 paginiPROJECT3 WinCCilker_8422100% (1)
- Siemens Manual For PLC S7 300 and 400 ProgrammingDocument228 paginiSiemens Manual For PLC S7 300 and 400 ProgrammingBangon Kali100% (1)
- S7-1200 PID CompactDocument50 paginiS7-1200 PID Compactg10357801Încă nu există evaluări
- PLC Basics: An Overview of Programmable Logic ControllersDocument49 paginiPLC Basics: An Overview of Programmable Logic ControllersKhaled OuniÎncă nu există evaluări
- SERV2 03E Data Blocks PDFDocument15 paginiSERV2 03E Data Blocks PDFKhaled OuniÎncă nu există evaluări
- The PLC Based Approach For Automation of Power Distribution in RadarDocument6 paginiThe PLC Based Approach For Automation of Power Distribution in RadarKhaled OuniÎncă nu există evaluări
- SIMIT enUS en-US PDFDocument876 paginiSIMIT enUS en-US PDFKhaled OuniÎncă nu există evaluări
- PLC AngDocument10 paginiPLC AngKhaled OuniÎncă nu există evaluări
- SCOUT Getting StartedDocument134 paginiSCOUT Getting StartedKhaled OuniÎncă nu există evaluări
- User'S Manual Siemens S7-224 PLC Reference: RCPU224Document28 paginiUser'S Manual Siemens S7-224 PLC Reference: RCPU224Shesharam ChouhanÎncă nu există evaluări
- Simatic S7-200Document28 paginiSimatic S7-200Ahmed RazaÎncă nu există evaluări
- Users Manual WinCC Flexible en-USDocument466 paginiUsers Manual WinCC Flexible en-USAlvin NguyenÎncă nu există evaluări
- CP243 1 - S7 OpcDocument45 paginiCP243 1 - S7 OpcKhaled OuniÎncă nu există evaluări
- 12E Technology Functions PID ControlDocument22 pagini12E Technology Functions PID ControlKhaled OuniÎncă nu există evaluări
- Infoplc Net Sitrain 09 Introduction To Profibus DP and Hmi PDFDocument31 paginiInfoplc Net Sitrain 09 Introduction To Profibus DP and Hmi PDFKhaled OuniÎncă nu există evaluări
- 10 - Introduction To PROFIBUS DP and The HMI Operator PanelDocument31 pagini10 - Introduction To PROFIBUS DP and The HMI Operator PanelMichele BacocchiaÎncă nu există evaluări
- Simatic Easy Motion Control - ManualDocument176 paginiSimatic Easy Motion Control - ManualTomislav CanjugaÎncă nu există evaluări
- S7 200 WinCCflexRT Panels en PDFDocument25 paginiS7 200 WinCCflexRT Panels en PDFKhaled OuniÎncă nu există evaluări
- Copper ore crusher simulation in PLCDocument13 paginiCopper ore crusher simulation in PLCKhaled OuniÎncă nu există evaluări
- Cpu210 eDocument140 paginiCpu210 eKhaled OuniÎncă nu există evaluări
- User Manual: Absolute Encoder TRT With PROFINET InterfaceDocument40 paginiUser Manual: Absolute Encoder TRT With PROFINET InterfaceKhaled OuniÎncă nu există evaluări
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDe la EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeEvaluare: 4 din 5 stele4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDe la EverandThe Little Book of Hygge: Danish Secrets to Happy LivingEvaluare: 3.5 din 5 stele3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDe la EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryEvaluare: 3.5 din 5 stele3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDe la EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceEvaluare: 4 din 5 stele4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)De la EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Evaluare: 4 din 5 stele4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDe la EverandShoe Dog: A Memoir by the Creator of NikeEvaluare: 4.5 din 5 stele4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDe la EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureEvaluare: 4.5 din 5 stele4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDe la EverandNever Split the Difference: Negotiating As If Your Life Depended On ItEvaluare: 4.5 din 5 stele4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDe la EverandGrit: The Power of Passion and PerseveranceEvaluare: 4 din 5 stele4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDe la EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaEvaluare: 4.5 din 5 stele4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDe la EverandThe Emperor of All Maladies: A Biography of CancerEvaluare: 4.5 din 5 stele4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDe la EverandOn Fire: The (Burning) Case for a Green New DealEvaluare: 4 din 5 stele4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDe la EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersEvaluare: 4.5 din 5 stele4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDe la EverandTeam of Rivals: The Political Genius of Abraham LincolnEvaluare: 4.5 din 5 stele4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDe la EverandThe Unwinding: An Inner History of the New AmericaEvaluare: 4 din 5 stele4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDe la EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyEvaluare: 3.5 din 5 stele3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDe la EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreEvaluare: 4 din 5 stele4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)De la EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Evaluare: 4.5 din 5 stele4.5/5 (119)
- Her Body and Other Parties: StoriesDe la EverandHer Body and Other Parties: StoriesEvaluare: 4 din 5 stele4/5 (821)
- Installation of SiebelDocument134 paginiInstallation of Siebelvijaykrishna.bv9701100% (2)
- RTN 980 Hardware Description PDFDocument793 paginiRTN 980 Hardware Description PDFRashid Mahmood Sajid100% (3)
- The FNDocument73 paginiThe FNMie NgeÎncă nu există evaluări
- Deepvcm: A Deep Learning Based Intrusion: Detection Method in VanetDocument6 paginiDeepvcm: A Deep Learning Based Intrusion: Detection Method in VanetSamsam87Încă nu există evaluări
- Adding EmailDocument31 paginiAdding EmailhackerÎncă nu există evaluări
- Flex ConnectDocument26 paginiFlex ConnectPadilla Dan JesusÎncă nu există evaluări
- Nokia 12i GSM Module: Let Your Machines TalkDocument2 paginiNokia 12i GSM Module: Let Your Machines TalkEug. Sam.Încă nu există evaluări
- GlobalProtect Admin Guide PANOS 8.0Document254 paginiGlobalProtect Admin Guide PANOS 8.0Khánh NguyễnÎncă nu există evaluări
- FortiOS 6.0.5 Log Reference PDFDocument1.076 paginiFortiOS 6.0.5 Log Reference PDFAhmad Hatta AHAÎncă nu există evaluări
- Laporan Praktikum Jaringan Komputer: "Packet Tracer - FTP Servers "Document22 paginiLaporan Praktikum Jaringan Komputer: "Packet Tracer - FTP Servers "Hilma Amalia WafdaÎncă nu există evaluări
- UM - HDL Buspro Setup Tool 2 (2017-08-04) PDFDocument31 paginiUM - HDL Buspro Setup Tool 2 (2017-08-04) PDFalex_marcolino100% (2)
- Cloud ArchitectureDocument32 paginiCloud ArchitectureKushal Kamra100% (1)
- Checkpoint Firewall Interview Questions Answers Vol 1.0Document16 paginiCheckpoint Firewall Interview Questions Answers Vol 1.0santhosh437100% (3)
- HP MSR930 Router Series - HP A-MSR20 - A-MSR30 - A-MSR50 - A-MSR900 - MSR93X-CMW520-R2509-SI Release Notes-C03926564Document90 paginiHP MSR930 Router Series - HP A-MSR20 - A-MSR30 - A-MSR50 - A-MSR900 - MSR93X-CMW520-R2509-SI Release Notes-C03926564Ivan RamirezÎncă nu există evaluări
- TSMA6B Bro en 3609-5622-12 v0300Document26 paginiTSMA6B Bro en 3609-5622-12 v0300RianzarnainÎncă nu există evaluări
- Cross Script XssDocument3 paginiCross Script XssAbdi RahmanÎncă nu există evaluări
- PurityFA 6.3.3 FlashArray AdminGuideDocument345 paginiPurityFA 6.3.3 FlashArray AdminGuideEsuresh5454Încă nu există evaluări
- School of Engineering Wireless Communication Lab 1: Wireless LAN (WLAN)Document7 paginiSchool of Engineering Wireless Communication Lab 1: Wireless LAN (WLAN)Liecell CabalesÎncă nu există evaluări
- ZXSDR BS8800Document9 paginiZXSDR BS8800vijay_786Încă nu există evaluări
- Introduction to SONET and DWDM Digital Transmission StandardsDocument35 paginiIntroduction to SONET and DWDM Digital Transmission StandardsOmar Ayoub100% (1)
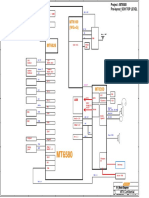
- PGN409 - Block DiagramDocument15 paginiPGN409 - Block DiagramncirÎncă nu există evaluări
- BigFix Patch AIX User GuideDocument139 paginiBigFix Patch AIX User GuideR VÎncă nu există evaluări
- FOSSASAT-1 Comms GuideDocument11 paginiFOSSASAT-1 Comms GuideJosé CostaÎncă nu există evaluări
- IMS Design and Log Analysis: Reference ManualDocument179 paginiIMS Design and Log Analysis: Reference ManualryadavÎncă nu există evaluări
- CIS Controls and Sub Controls Mapping To NIST Special Publication 800 53 Rev 4 Low Final v1.1Document71 paginiCIS Controls and Sub Controls Mapping To NIST Special Publication 800 53 Rev 4 Low Final v1.1Ankit ShekharÎncă nu există evaluări
- Edge Computing: Visvesvaraya Technological UniversityDocument22 paginiEdge Computing: Visvesvaraya Technological UniversityJayashankar MÎncă nu există evaluări
- Introduction To Network SecurityDocument16 paginiIntroduction To Network SecurityTalha UmarÎncă nu există evaluări
- Bandwidth Provisioning and Capacity Planning Tools: J. Almhana, Z. Liu, R. Mcgorman, B. LanteigneDocument3 paginiBandwidth Provisioning and Capacity Planning Tools: J. Almhana, Z. Liu, R. Mcgorman, B. Lanteignemustaq12Încă nu există evaluări
- Oxygen Hdv24201 User Guide enDocument234 paginiOxygen Hdv24201 User Guide enYorgos GeorgeÎncă nu există evaluări
- Agilia SP MC Brosjyre PDFDocument4 paginiAgilia SP MC Brosjyre PDFnageb0% (1)