S-ar putea să vă placă și
- Informe Final-Equipo 1Document24 paginiInforme Final-Equipo 1Mrx MirrorxÎncă nu există evaluări
- Automatas FInitosDocument11 paginiAutomatas FInitosRonaldo ChavezÎncă nu există evaluări
- Ejemplo 8 EstadosDocument50 paginiEjemplo 8 Estadosjrivas31119Încă nu există evaluări
- Programación Aplicada A La Mecatrónica: Profesor: Mg. Ing. Daniel MendozaDocument19 paginiProgramación Aplicada A La Mecatrónica: Profesor: Mg. Ing. Daniel MendozaYsael Narciso YanavilcaÎncă nu există evaluări
- Más sobre compuertas lógicas NOR, NAND, XOR y XNORDocument12 paginiMás sobre compuertas lógicas NOR, NAND, XOR y XNORFernando ArenasÎncă nu există evaluări
- Pruebas de Validacion OptimistasDocument1 paginăPruebas de Validacion OptimistasIrwing Daniel Valdeolivar IzquierdoÎncă nu există evaluări
- 2.2.3.3 Packet Tracer - Troubleshoot VTP and DTPDocument3 pagini2.2.3.3 Packet Tracer - Troubleshoot VTP and DTPEdu Gumer Caceres HuamanÎncă nu există evaluări
- Preparatorio Laboratorio de Sistemas Digitales Practica 11Document8 paginiPreparatorio Laboratorio de Sistemas Digitales Practica 11Felipe AndinoÎncă nu există evaluări
- Entrenador PICDocument84 paginiEntrenador PICLuis León0% (1)
- Modelado de Llenado de EstanqueDocument6 paginiModelado de Llenado de EstanqueMichelle Andrea Cajas RivasÎncă nu există evaluări
- Analisi LexicoDocument25 paginiAnalisi LexicoBrandon PascÎncă nu există evaluări
- CordicDocument256 paginiCordicGerman ItuÎncă nu există evaluări
- Aaron Velazquez - Algoritmo de Ordenamiento Rápido (QuickSort) en ParaleloDocument9 paginiAaron Velazquez - Algoritmo de Ordenamiento Rápido (QuickSort) en ParaleloJesus J. Aaron VeguÎncă nu există evaluări
- 5 - Maquinas de Estado Con VHDLDocument21 pagini5 - Maquinas de Estado Con VHDLwilliamÎncă nu există evaluări
- Ejercicios Básicos en AssemblerDocument11 paginiEjercicios Básicos en AssemblerAlexandra WellsÎncă nu există evaluări
- Laboratorio 2Document11 paginiLaboratorio 2Ana Luz CotradoÎncă nu există evaluări
- ESP-IDF CONSOLA COMPONENTEDocument5 paginiESP-IDF CONSOLA COMPONENTEJose Luis Rosario Salvador100% (1)
- EnsambladorDocument272 paginiEnsambladorCarlos LopeÎncă nu există evaluări
- Problemas Grupo 6Document18 paginiProblemas Grupo 6cupido0005Încă nu există evaluări
- Compuerta or de Dos Entradas Usando El PerceptronDocument11 paginiCompuerta or de Dos Entradas Usando El PerceptronJòse IèdzÎncă nu există evaluări
- Actividad 4Document8 paginiActividad 4Mauricio C EspinozaÎncă nu există evaluări
- CONVERSIONES A/D Y D/ADocument6 paginiCONVERSIONES A/D Y D/AManuel HerreraÎncă nu există evaluări
- Maquina de MealyDocument12 paginiMaquina de MealyRicardo Andres CastiblancoÎncă nu există evaluări
- Guía de Laboratorio #3Document14 paginiGuía de Laboratorio #3Jimmy HerreraÎncă nu există evaluări
- Paradigmas de ProgramaciónDocument9 paginiParadigmas de ProgramaciónluisÎncă nu există evaluări
- Aplicaciones de Circuitos DigitalesDocument15 paginiAplicaciones de Circuitos DigitalesAlex Pomier AliagaÎncă nu există evaluări
- Introducción a VHDLDocument34 paginiIntroducción a VHDLAnel VallarinoÎncă nu există evaluări
- ADC-DAC conversión 8 bits sensor voltaje 4 horasDocument8 paginiADC-DAC conversión 8 bits sensor voltaje 4 horasJacobo QuinteroÎncă nu există evaluări
- Sincronización de variables compartidas mediante semáforos, monitores y regiones críticasDocument4 paginiSincronización de variables compartidas mediante semáforos, monitores y regiones críticastoniskaiÎncă nu există evaluări
- Proyecto Final CompiladoresDocument42 paginiProyecto Final CompiladoresValdr StiglitzÎncă nu există evaluări
- Equivalencias Entre NORD y NANDDocument9 paginiEquivalencias Entre NORD y NANDPamela VarelaÎncă nu există evaluări
- Khepera III robot estudio guíaDocument19 paginiKhepera III robot estudio guíaOscar Gómez HernándezÎncă nu există evaluări
- Reporte Pract1 EmbebidosDocument15 paginiReporte Pract1 Embebidosfedexin_40Încă nu există evaluări
- Lab6 Linealizacion y Punto de OperacionDocument6 paginiLab6 Linealizacion y Punto de OperacionJohan Adrian Arcos SantacruzÎncă nu există evaluări
- Unidad 3 Analisis LexicoDocument23 paginiUnidad 3 Analisis LexicoSelene EGÎncă nu există evaluări
- Sistema Experto Guia de Rutas de ManaguaDocument6 paginiSistema Experto Guia de Rutas de ManaguaJean Rodriguez BoddenÎncă nu există evaluări
- Ejercicios Propuestos Memorias Mapa Memorias PDFDocument2 paginiEjercicios Propuestos Memorias Mapa Memorias PDFAntonio Andres Duffoo MarroquinÎncă nu există evaluări
- Modelamiento e Integración de Procesos 1Document13 paginiModelamiento e Integración de Procesos 1Carmen Liliana Siu YonÎncă nu există evaluări
- Repertorio de InstruccionesDocument14 paginiRepertorio de InstruccionesJonathan BultrónÎncă nu există evaluări
- Informe Final 7Document12 paginiInforme Final 7Eva Lorena Mendoza ReyesÎncă nu există evaluări
- Sensor de Humedad Programado en PIC16F84ADocument31 paginiSensor de Humedad Programado en PIC16F84AEliaquin Clavijo ManuttupaÎncă nu există evaluări
- Meneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaDocument100 paginiMeneses Pavel Diseño Modulo Educativo Control Sistema Bola VarillaAdrianaBenavides100% (1)
- Introducción al lenguaje ensambladorDocument59 paginiIntroducción al lenguaje ensambladorAbel Diaz OlivaresÎncă nu există evaluări
- Diagrama de Ojos Informe de LaboratorioDocument3 paginiDiagrama de Ojos Informe de LaboratorioKarla BenthamÎncă nu există evaluări
- Grafo BipartitoDocument5 paginiGrafo BipartitoGastón Ernesto Escobar ParedesÎncă nu există evaluări
- Practicas CompletoDocument20 paginiPracticas CompletoGerardo Caro PerezÎncă nu există evaluări
- Preguntas Cap2Document8 paginiPreguntas Cap2Jano Jesus AlexÎncă nu există evaluări
- Procesadores SuperescalaresDocument2 paginiProcesadores SuperescalaresWendyÎncă nu există evaluări
- 2019-09-19-195321-94 Diseño de Maquinas ASMDocument87 pagini2019-09-19-195321-94 Diseño de Maquinas ASMLeonardo CastilloÎncă nu există evaluări
- Examen de Sistemas Numeracion (1º G)Document1 paginăExamen de Sistemas Numeracion (1º G)stanlerÎncă nu există evaluări
- Contador Descendente de 0 A 99 Usando Display Cátodo Común.Document3 paginiContador Descendente de 0 A 99 Usando Display Cátodo Común.carlosÎncă nu există evaluări
- Objetivos de Los SODocument8 paginiObjetivos de Los SORey ArturoÎncă nu există evaluări
- Pegar CronogramaDocument1 paginăPegar CronogramaAngela Espinoza AcuñaÎncă nu există evaluări
- Prepráctica Control Bola VigaDocument10 paginiPrepráctica Control Bola VigaDaniel GuillernaÎncă nu există evaluări
- FuncionesCppDocument11 paginiFuncionesCppLaura DomínguezÎncă nu există evaluări
- Lenguaje EnsambladorDocument20 paginiLenguaje Ensambladoranon-219776100% (2)
- Automatas, Tipos, EtcDocument7 paginiAutomatas, Tipos, EtcRICARDO MAXIMILIANO DE LIRA CHAVEZÎncă nu există evaluări
- Conver AFN AFDDocument24 paginiConver AFN AFDDavid Galindo BaronÎncă nu există evaluări
- ReporteDocument6 paginiReporteRosendo ChableÎncă nu există evaluări
- Act 3. Autómatas Finitos NO Deterministas AFNDocument11 paginiAct 3. Autómatas Finitos NO Deterministas AFNKaren DíazÎncă nu există evaluări
- Conversión AFND a AFDDocument3 paginiConversión AFND a AFDConsuelo GarzónÎncă nu există evaluări
- 2014 6automatasDocument5 pagini2014 6automatasedwinÎncă nu există evaluări
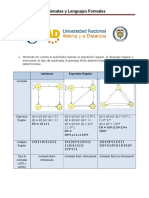
- Automatas y Lenguajes FormalesDocument184 paginiAutomatas y Lenguajes FormalesMiguel Angel Martinez de la C.Încă nu există evaluări
- Unidad IIIDocument16 paginiUnidad IIIRamis Gutiérrez DG0% (1)
- Manual Expresiones Regulares-AdfDocument28 paginiManual Expresiones Regulares-Adfmauro_carreroÎncă nu există evaluări
- Ejercicio 1Document5 paginiEjercicio 1Jhoanita SerratoÎncă nu există evaluări
- Problemas Lenguajes y AutómatasDocument8 paginiProblemas Lenguajes y AutómatasCarlosGF6Încă nu există evaluări
- Diseño Secuencial Con Flip FlopsDocument4 paginiDiseño Secuencial Con Flip FlopsPEDRO DAVID PESANTEZ PESANTEZÎncă nu există evaluări
- Autómatas FinitosDocument2 paginiAutómatas FinitosDANIEL ALEXANDER VICENTE SANICÎncă nu există evaluări
- Wuolah Free ResumenTCDocument23 paginiWuolah Free ResumenTCadrianzgz10Încă nu există evaluări
- Tarea2 TC192Document4 paginiTarea2 TC192Bravo ReyesÎncă nu există evaluări
- COMPILADORES5Document10 paginiCOMPILADORES5Eduardo RojasÎncă nu există evaluări
- Tarea 7Document5 paginiTarea 7Jose PerezÎncă nu există evaluări
- Lab1 DocDocument11 paginiLab1 DocwilliÎncă nu există evaluări
- Fechas Lenguajes y Automatas IDocument3 paginiFechas Lenguajes y Automatas IdfghjkÎncă nu există evaluări
- Examen Final - AUTOMATAS GRAMATICALES Y LENGUAJES - (GRUPO1) PDFDocument10 paginiExamen Final - AUTOMATAS GRAMATICALES Y LENGUAJES - (GRUPO1) PDFDiego Armando Pinillo SanchezÎncă nu există evaluări
- Unidad II. Maquinas de Estados FinitosDocument6 paginiUnidad II. Maquinas de Estados FinitosNNeft MrtzÎncă nu există evaluări
- T Comput Ac I On Rodrigo de CastroDocument228 paginiT Comput Ac I On Rodrigo de CastroДпђяеш ЯiисФиÎncă nu există evaluări
- Diagramas de TransicionDocument11 paginiDiagramas de TransicionDaniel David Ortiz CastroÎncă nu există evaluări
- Teoria LenuajesDocument176 paginiTeoria LenuajesVladimiro Ibañez QuispeÎncă nu există evaluări
- Autómatas Finitos No DeterministasDocument18 paginiAutómatas Finitos No DeterministasbioinformaticolokoÎncă nu există evaluări
- AutómatasDocument34 paginiAutómatasPxtricÎncă nu există evaluări
- Examen Automatas 75pDocument7 paginiExamen Automatas 75psergio duqueÎncă nu există evaluări
- Tarea 1 FundamentacionDocument22 paginiTarea 1 Fundamentacionmishell rojasÎncă nu există evaluări
- Trabajo Momento 3 Automatas y Lenguajes PDFDocument14 paginiTrabajo Momento 3 Automatas y Lenguajes PDFJuan ZumayaÎncă nu există evaluări
- Informe LegalDocument14 paginiInforme LegalHenrry Tandaypan MariñosÎncă nu există evaluări
- ReporteDocument6 paginiReporteRosendo ChableÎncă nu există evaluări
- 27 37840770-3 RuthDocument8 pagini27 37840770-3 RuthRuth FajardoÎncă nu există evaluări
- Automatas DFA - NFA ConversionDocument16 paginiAutomatas DFA - NFA ConversionAnaliz90Încă nu există evaluări
- AFD-Autómata Finito DeterminísticoDocument4 paginiAFD-Autómata Finito DeterminísticoRichar CastañedaÎncă nu există evaluări